



下位机的控制由一块多路舵机控制电路板来实现,如图3-3所示。其主要模块有PIC16F877A单片机、串口通信模块、无线接收模块、无线发射模块、电源模块、舵机驱动电路模块和大容量串行E2 PROM模块。下面分别对各模块的结构及功能进行详细介绍。
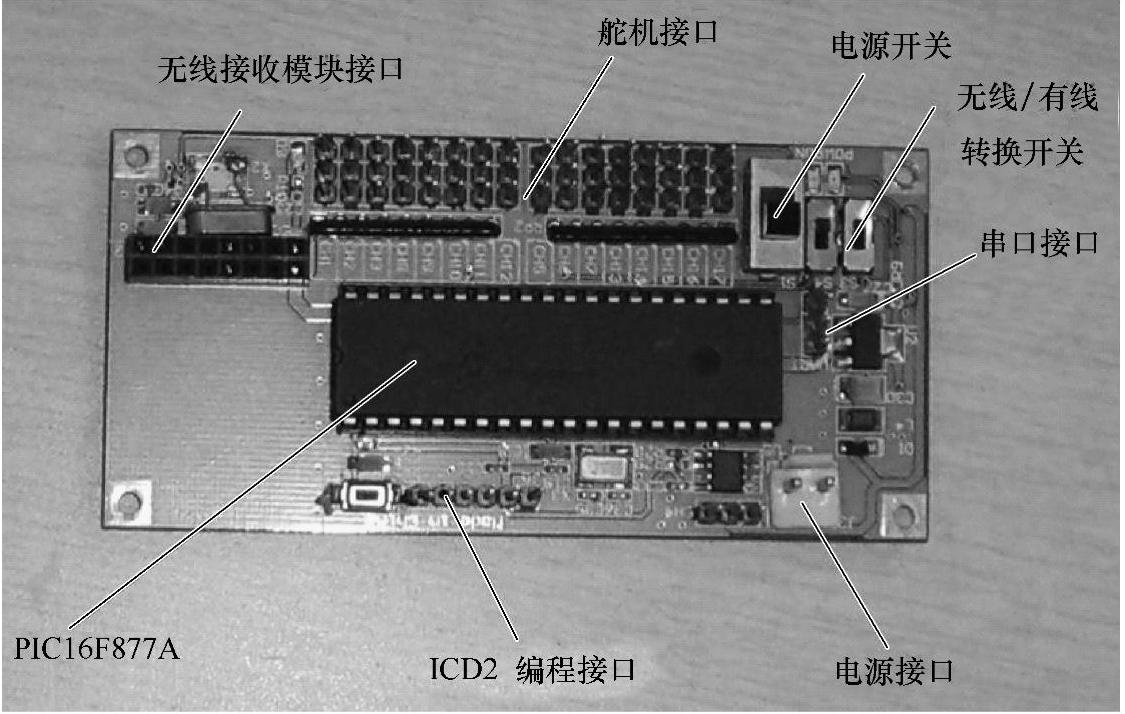
图3-3 PIC控制电路板
1.PIC16F877A单片机
该多路舵机控制板采用的单片机为PIC16F877A。
单片机是指将中央处理单元CPU、程序存储器ROM、数据存储器RAM以及输入输出端口(I/O口)等部件集成在一片大规模或超大规模集成电路上的超微型计算机。
PIC系列单片机的硬件设计简洁,指令系统设计精炼。选择用这一系列的单片机主要因为其具有以下的优点:
1)哈佛总线结构:所谓哈佛总线结构,也就是程序存储器和数据存储器位于不同的逻辑空间,而数据总线和指令总线分离,并且采用不同的宽度。
2)指令单字节化:因为数据总线和指令总线是分离的,并且采用了不同的宽度,所以程序存储器ROM和数据存储器RAM的寻址空间(即地址编码空间)是相互独立的,而且两种存储器宽度也不同。这样设计不仅可以确保数据的安全性,还能提高运行速度和实现全部指令的单字节化。
3)精简指令集(RISC)技术:PIC系列单片机不仅全部指令均为单字节指令,而且绝大多数指令为单周期指令,有利于提高执行速度。
4)寻址方式简单:PIC系列单片机只有4种寻址方式(即寄存器间接寻址、立即数寻址、直接寻址和位寻址),容易掌握。
5)代码压缩率高:1KB的存储空间,对于像MCS-51这样的单片机,大约只能存放600条指令,而对于PIC系列单片机则能够存放的指令条数多达1024条。
6)运行速度快:由于采用哈佛总线结构,并且指令读取和执行采用流水作业方式,使得运行速度大大提高。
7)功耗低:PIC系列单片机的功率消耗极低,有些型号甚至在4MHz时钟下工作时电流不超过2mA,在睡眠模式下电流可以达到1μA以下。
8)驱动能力强:I/O端口驱动负载的能力较强,每个I/O引脚输入和输出电流的最大值可以分别达到25mA和20mA,能够直接驱动发光二极管LED、光耦合器或者微型继电器。
9)I2C和SPI串行总线端口:用这两种串行总线技术可以实现芯片间同步串行数据传输。
10)寻址空间设计简洁:PIC系列单片机的程序、堆栈、数据三者各自采用互相独立的寻址(或抵制编码),而且前两者的地址安排不需要用户操心。
11)外接电路简洁:PIC单片机内集成了上电复位电路、I/O引脚上拉电路、看门狗定时器等,可以最大限度地减少或免用外接元器件。
12)开发方便。
13)C语言编程。
14)品种丰富。
15)程序存储器版本齐全。(https://www.xing528.com)
16)程序保密性强。
PIC16F877的工作频率范围为DC-20MHz,具有上电复位(Power-on Reset)和掉电锁定复位(Brown-out Reset)两种重置功能,以及上电定时器和晶振起振定时器。除一个看门狗定时器外,另外还有三个定时器和两个CCP模块,串行通信模式方面共支持USART、SPI和I2C。
可以用几个不同的中断源激活处理器从休眠状态中苏醒,并具有固定的中断开销时间,同步中断是3个周期。用户可以根据需要存储/恢复寄存器。
2.通信模块
串口通信模块是整个系统与PC发送及接收数据和命令的通道,PC将外界信息进行处理和计算,得出结果,然后将动作指令号发送到下位机。下位机接收到动作指令后输出PWM波控制舵机运动。数据的发送和接收有两种方式:即有线模式和无线模式。本设计采用有线的串口通信。
SP3232C专用模块负责接收上位机发来的动作指令号,其电路原理图如图3-4所示。
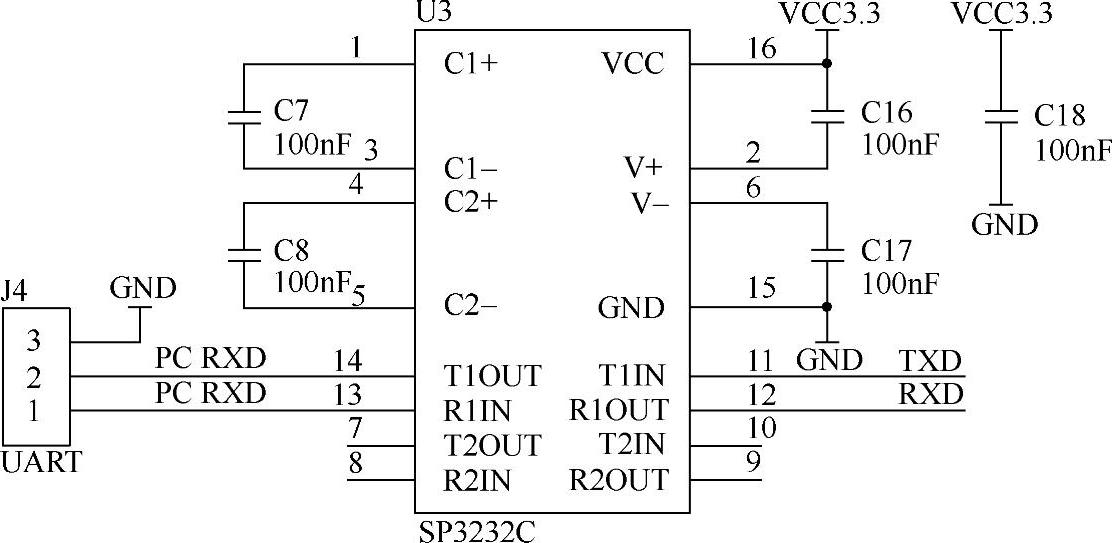
图3-4 串口通信模块电路图
3.电源模块
情感机器人所需电压共分两种,一种是给舵机供电的6V电压,一种是给各个芯片供电的3.3V电压,为了解决不同电压的问题,本文采用LM1117电源芯片,将电池的6V电压转换成3.3V电压,这样就可以用一个电源产生两种电压值(代号分别为VIN和VCC3.3)分别给舵机和各个芯片供电。电源模块原理图如图3-5所示。
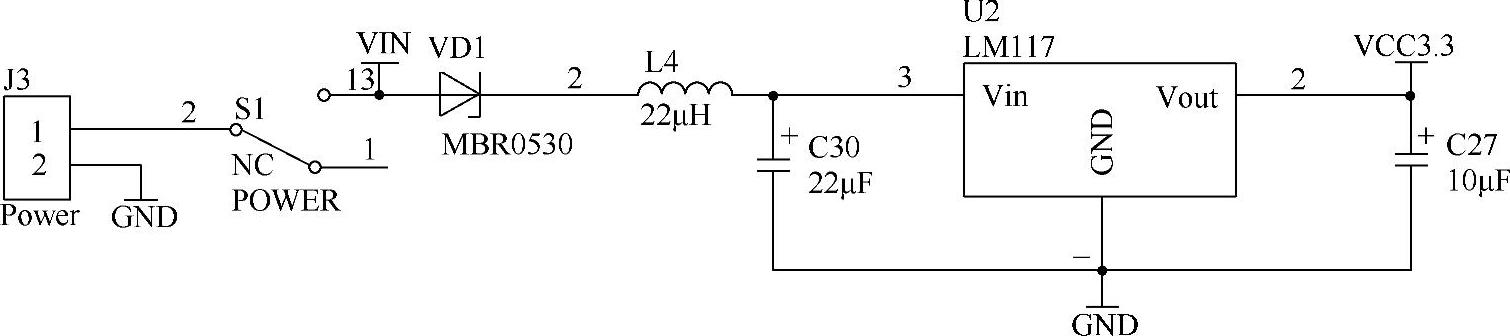
图3-5 电源模块原理图
4.舵机驱动电路模块
舵机驱动电路主要由一个三针插座以及与之相配套的电阻构成,具体实现功能是为舵机提供工作电源,发送控制脉冲,其原理图如图3-6所示,PHX与PIC单片机控制脉冲与发送I/O口相连,6V为舵机的工作电压,电压VCC为上拉电压,保证由PHX发送过来的控制脉冲可以可靠的被舵机接收。
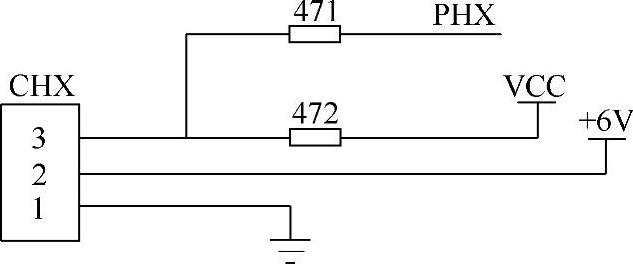
图3-6 舵机原理图
5.大容量串口存储器
多路舵机控制板能够接收上位机PC发来的各种指令,并能按照用户事先编制好的动作来控制各电机有条不紊的运动,必然要求电路板上接有足够容量的存储器。本电路板先用的存储器是AT24C512大容量串口存储器。其原理和外围电路如图3-7所示。
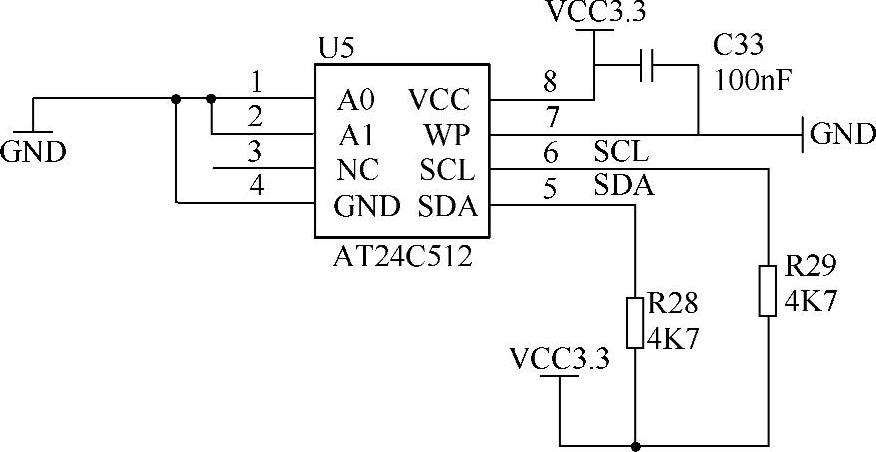
图3-7 AT24C512大容量串口存储器外围电路原理图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。