



【摘要】:下位机则采用性价比高的PIC16F877单片机,上位机和下位机通过RS232串行接口或者无线模块进行通信。图3-2所示为情感机器人的系统结构图,该机器人通过机器视觉、语音识别,红外传感器等3个模块感知外部环境信息。情感机器人的语音、身体语言和表情三者共同构成了情感机器人的情感表达。图3-2 情感机器人系统结构图
情感机器人电控系统是研究的硬件基础,整个电控系统采用上位机与下位机结合的结构,上位机采用速度快,外部接口齐全,连接存储空间大的PC。其主要承担运算量大、计算复杂的图像处理、语音识别和语音合成工作。下位机则采用性价比高的PIC16F877单片机,上位机和下位机通过RS232串行接口或者无线模块进行通信。下位机主要负责传感器信息接收及初级处理、电动机驱动和运动控制等工作。
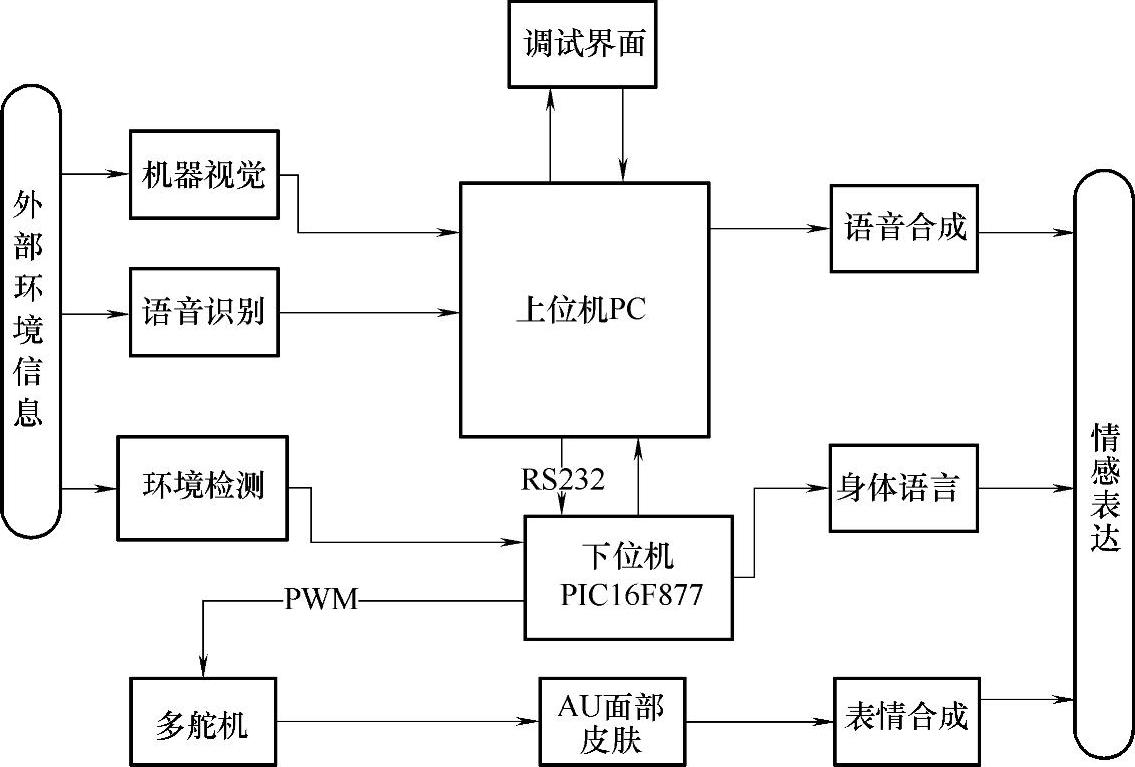
图3-2所示为情感机器人的系统结构图,该机器人通过机器视觉、语音识别,红外传感器等3个模块感知外部环境信息。机器视觉通过上位机处理后具有人脸识别的功能。语音识别模块经过传声器将语音传递给上位机,上位机对语音信号进行情感特征提取,得到输入语音的情感。红外传感器可以实现感应机器人周围障碍或者是人员靠近的功能,并可以将探测到的信号传输给下位机系统,下位机系统经处理后通过RS232通信传递给上位机系统。上位机系统将图像信息,语音信息,下位机信息进行综合处理,得到与机器人交互者及周围环境的信息,然后通过机器人的情感输出模块向下位机系统和语音合成模块发送指令。下位机系统通过PWM控制电机运动产生肢体语音(点头、摇头)和面部表情。上位机在经过语音合成后通过音响向人类表达机器人的语言。情感机器人的语音、身体语言和表情三者共同构成了情感机器人的情感表达。人类可以通过上位机系统的调试界面对机器人各功能模块进行调试。下面主要来介绍下位机的工作。
 (https://www.xing528.com)
(https://www.xing528.com)
图3-2 情感机器人系统结构图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。