



机器人头部运动学仿真涉及正运动学、逆运动学、工作空间、轨迹规划等问题。本文通过分析实物,发现表情头的头部各部位的运动其实是带有闭链的串联连杆的运动,其中闭链的四杆机构是驱动器,可以驱动其他连杆运动,由于我们是在关节空间中分析问题,而不是在驱动空间,这样我们就不必考虑四杆机构,直接把它简化成被驱动的连杆,使问题得到简化。通过Pro/E三维造型,得到各关节的具体尺寸,为我们分析问题提供了方便。
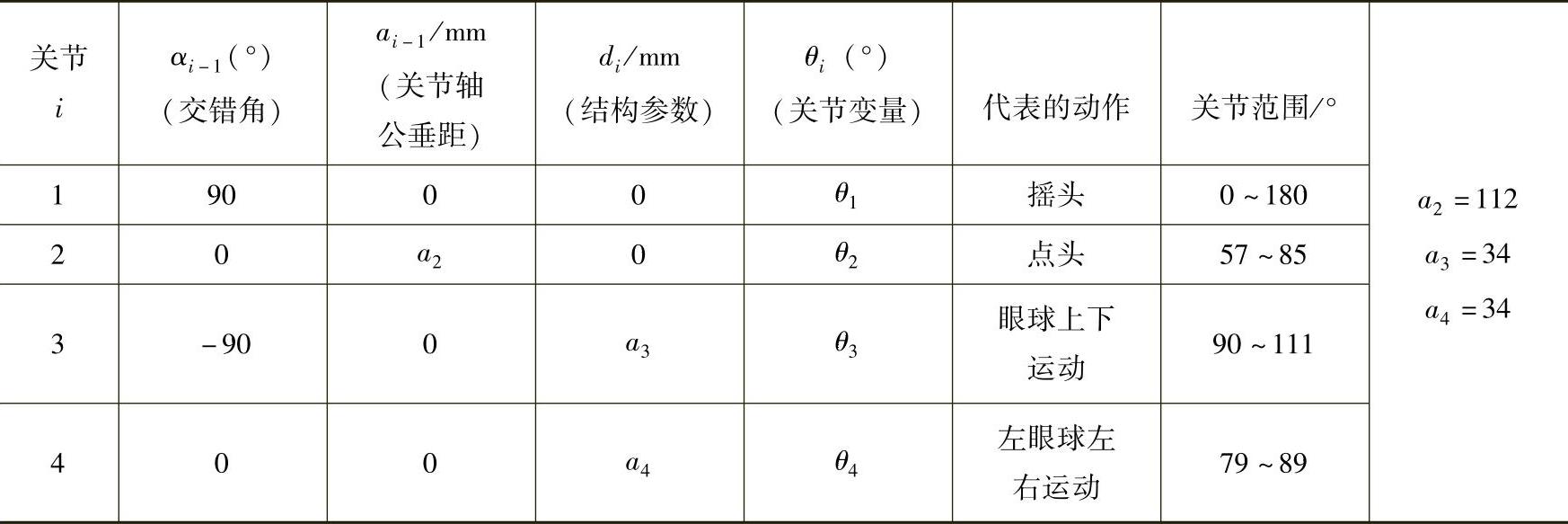
机器人眼球的正运动学分析,建立如下坐标系:共设五个坐标系——S1,S2,S3,S4和S5,如图2-16所示,这里我们采用的是后置坐标系。其中坐标系的Z与关节轴重合,坐标系的原点位于两关节轴公垂线与关节轴的交点,X轴沿公垂线由前一关节指向后一关节。机器人眼球运动各杆件参数见表2-5。
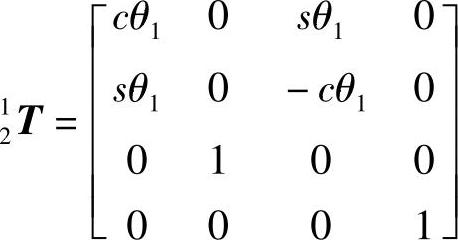
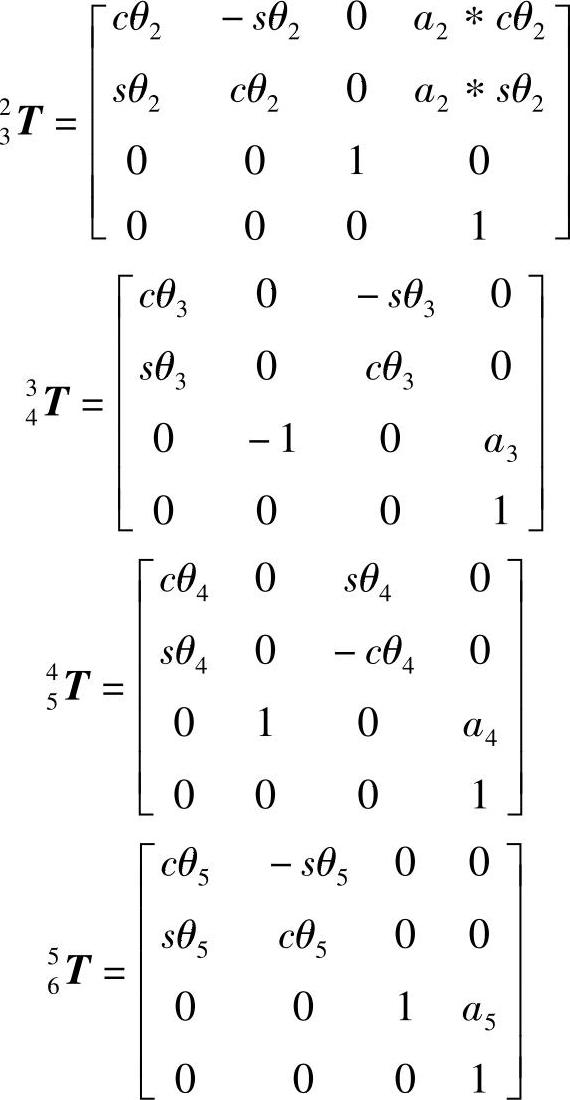
两杆间的位姿矩阵,根据参数表和D-H公式可得
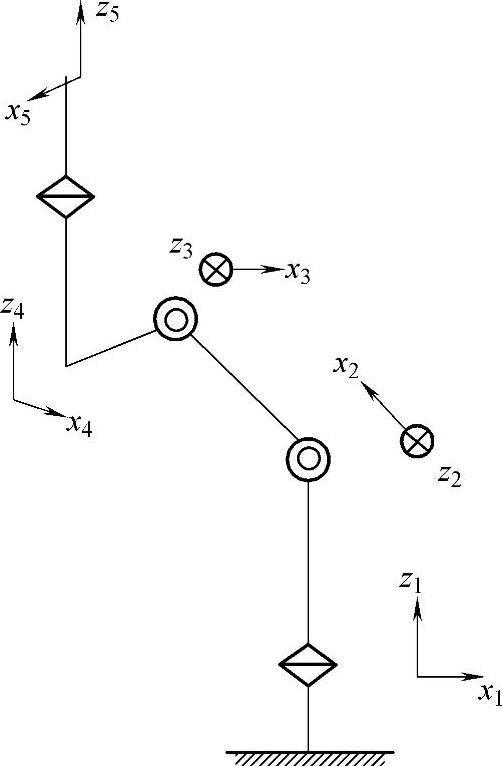
图2-16 机器人眼球坐标系
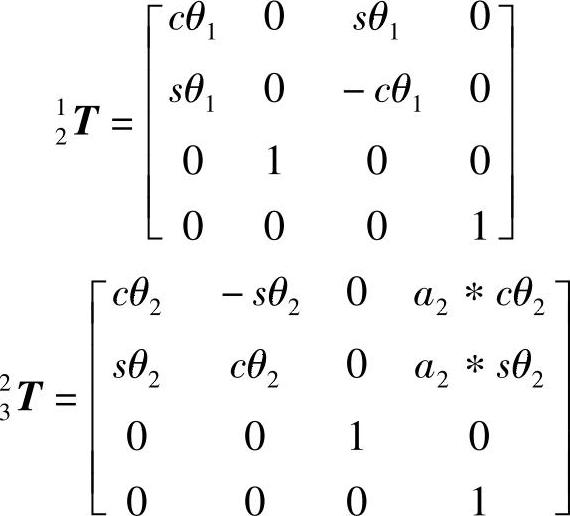
表2-5 机器人眼球运动各杆件参数
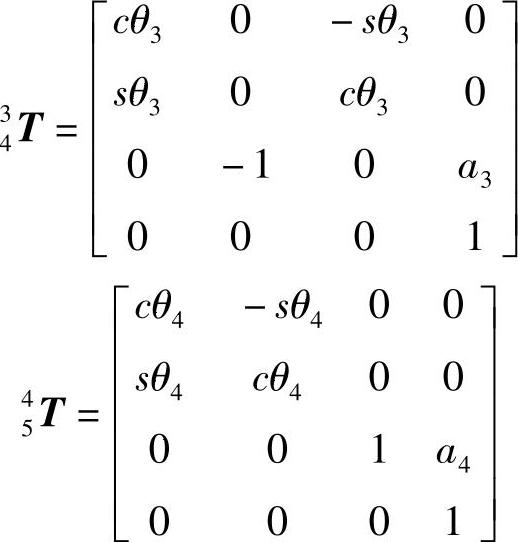
将各个连杆矩阵连乘得到51T
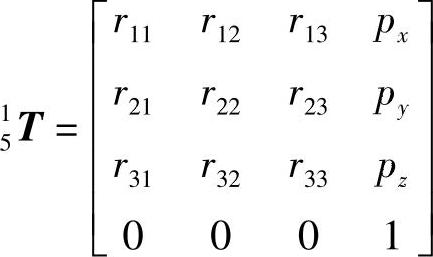
式中
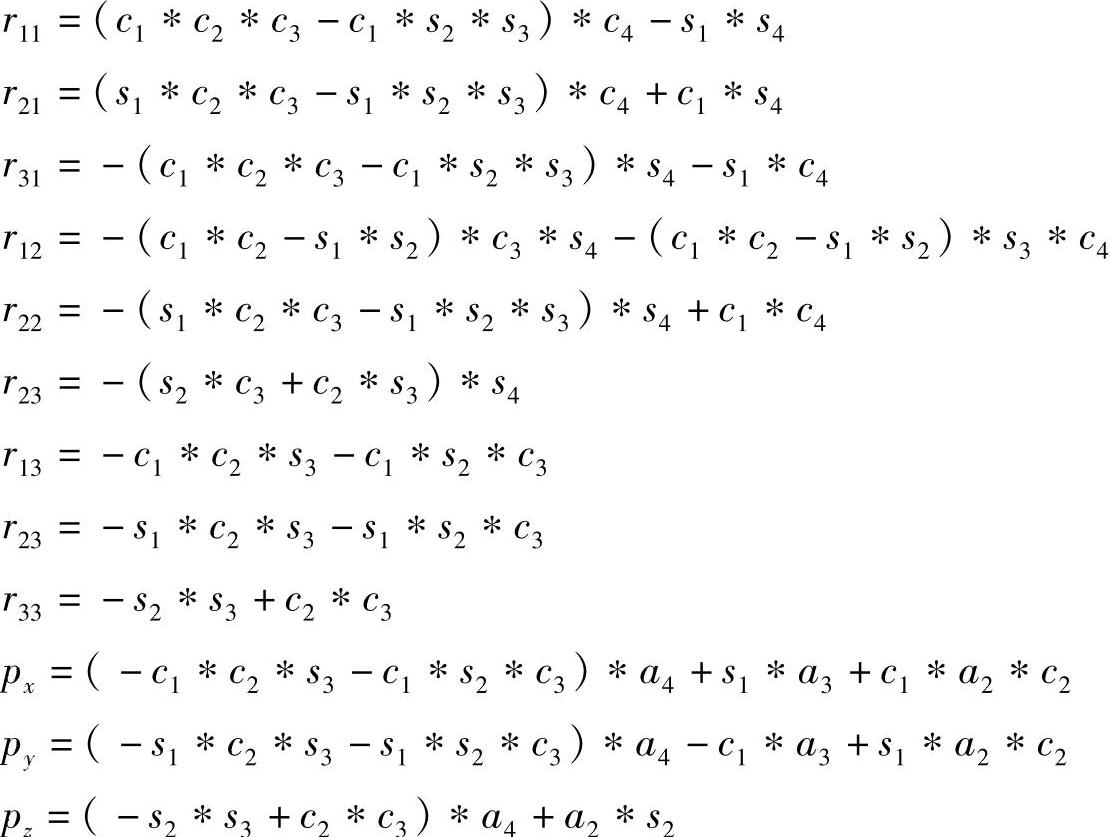
其中ci=cosθi(i=1,2,3,4);si=sinθi(i=1,2,3,4)
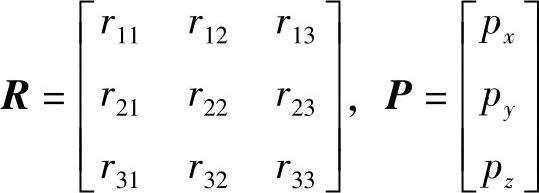
于是可得眼球作为末端执行器的姿态和位置分别是
机器人眼球的运动仿真,通过matlab中的robot tools工具箱,建立从机器人脖子到眼球的运动模型,在控制面板(见图2-17)的控制框内输入4个关节角的值,便可以计算出眼球相对于基础坐标系的空间位置,如图2-18所示的三维立体图(图示为起始状态),这样,就可以驱动机器人头部运动,其效果如同实际控制机器人一样。
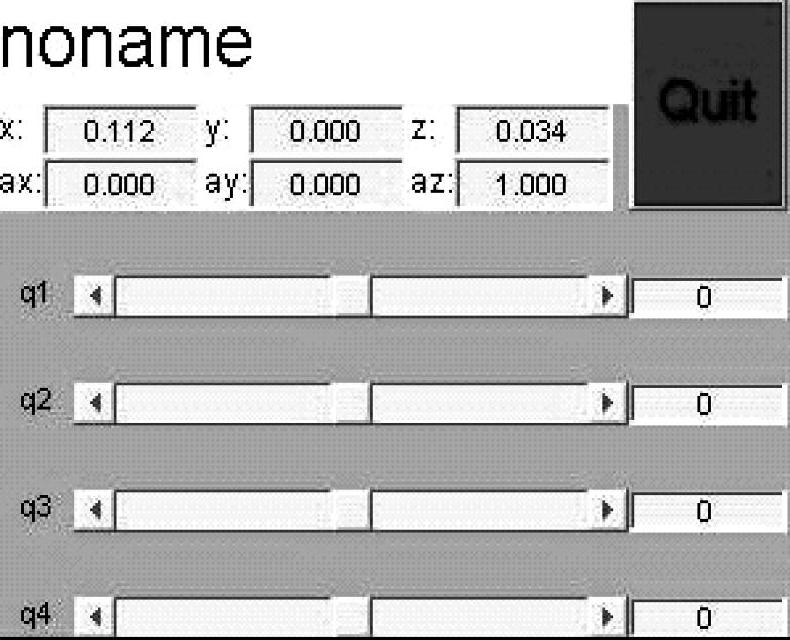
图2-17 控制面板
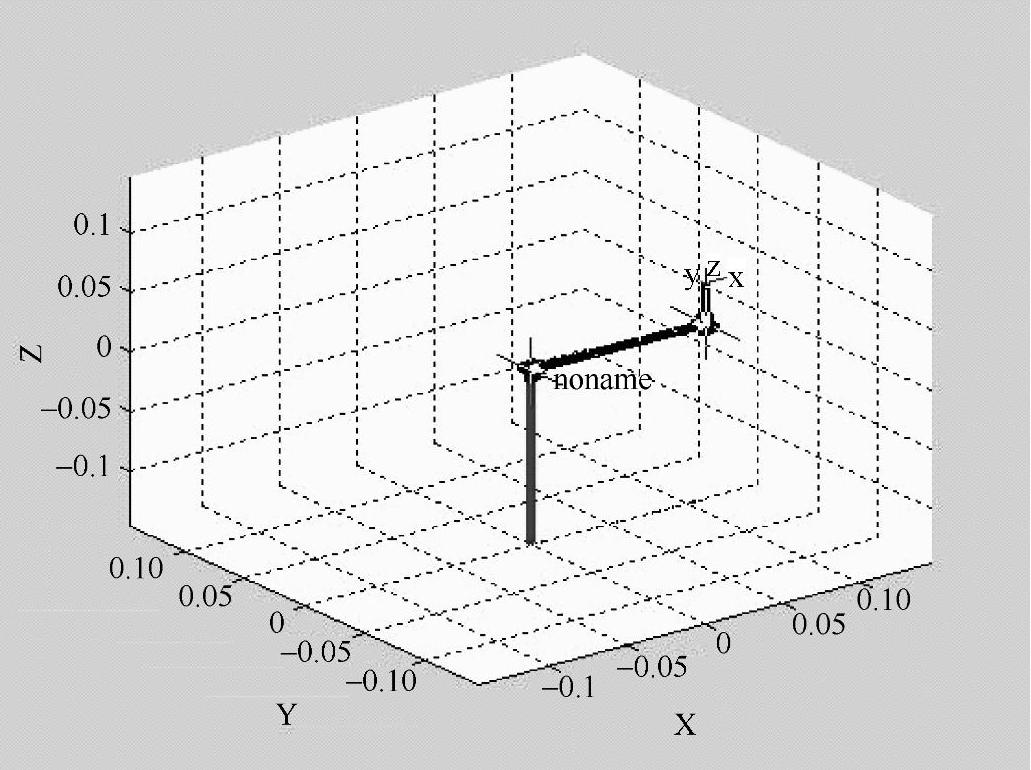
图2-18 三维立体图
1.正运动仿真实例
假定机器人眼球初始关节量q=[0000],此时眼球位于空间N1=(0.112,0.000,0.034)的位置,当运动到空间Ne=(0.115,-0.005,0.075)时关节变量就会变化至qe=[0.251320.37698-0.565470.18849],通过matlab仿真,可以生成机器人从起点运动到终点的关节坐标轨迹。例如第一个点为
T(:,:,1)=
1.0000 0 0 0.1120
0 1.0000 0 0
0 0 1.0000 0.0340
0 0 0 1.0000
最后一点为
T(:,:,36)=
0.8880 -0.4226 0.1815 0.1070
0.4214 0.9057 0.0466 0.0275
-0.1841 0.0351 0.9823 0.0746
0 0 0 1.0000
运动学验证,对终止位置关节量进行赋值:(https://www.xing528.com)
θ1=0.25132,θ2=0.37698,θ3=-0.56547,θ4=0.18849
代入公式姿态矩阵和位置矩阵可得
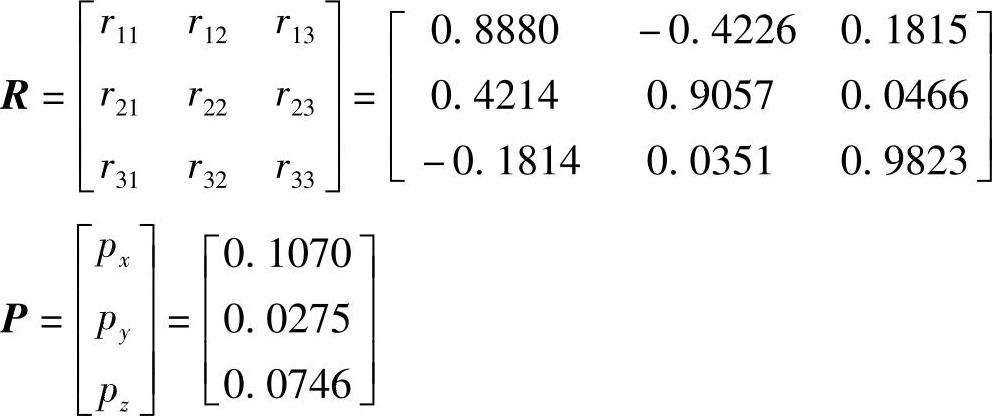
和上面公式中的最后一点的位姿矩阵结果完全符合,可见正运动学模型完全正确。
仿真结果分析:通过仿真,可以看出机器人头部各关节在运动过程中情况正常,运动平稳,连杆之间没有错位冲突的情况,验证了所有连杆参数设计的合理性。
机器人眼球末端位移曲线如图2-19所示,表示机器人从初始位置运动到终止位置时,末端关节沿x,y,z方向的位移变化。
其位移变化三维图如图2-20所示。
其中各关节变量变化如图2-21所示。
机器人眼睑的运动学仿真,机器人眼睑的正运动学,建立如下坐标系,共设六个坐标系:S1,S2,S3,S4,S5,S6,如图2-22所示。机器人眼睑运动各杆件参数见表2-6。
表2-6 机器人眼睑运动各杆件参数表
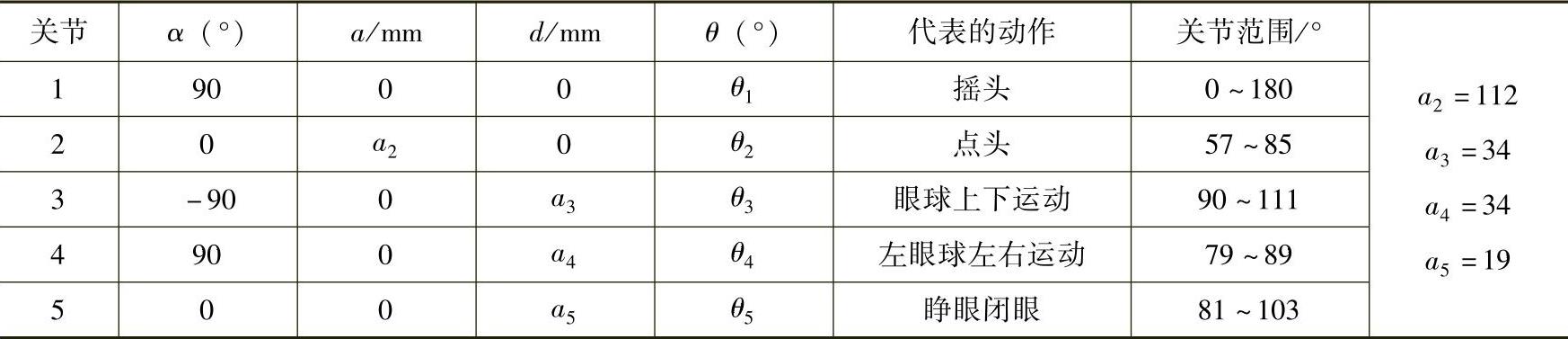
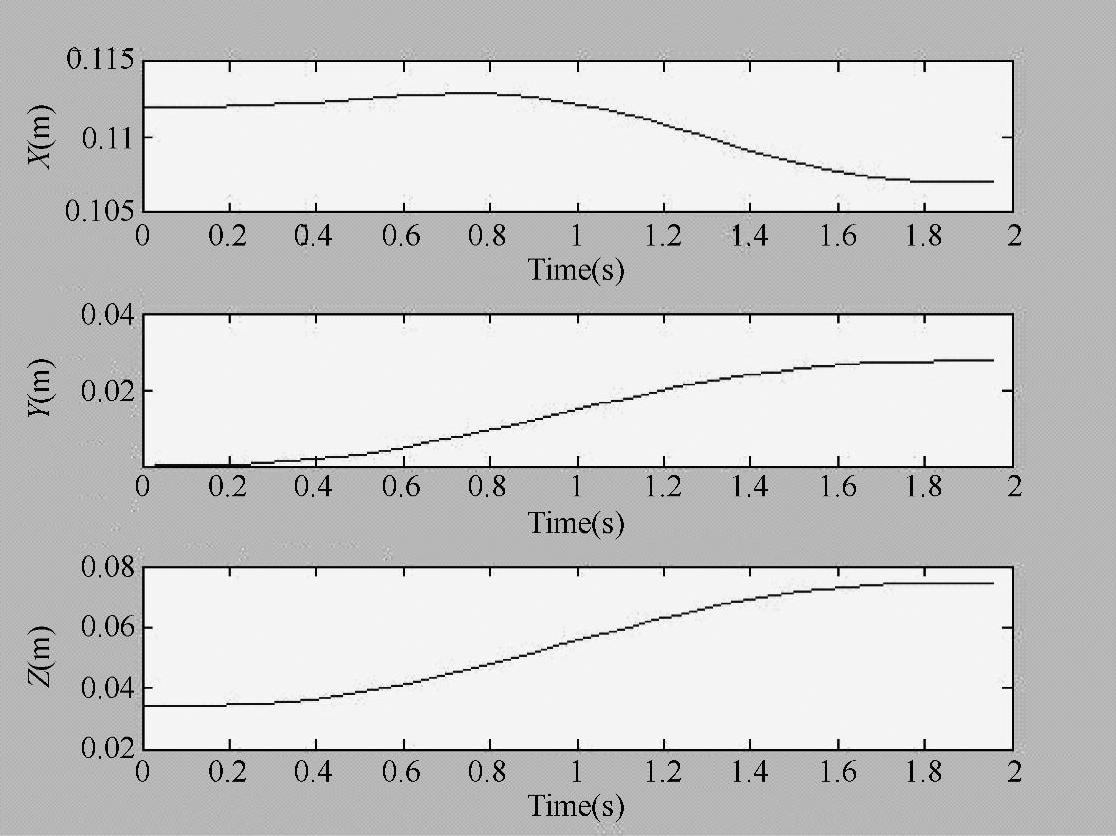
图2-19 机器人眼球末端位移曲线
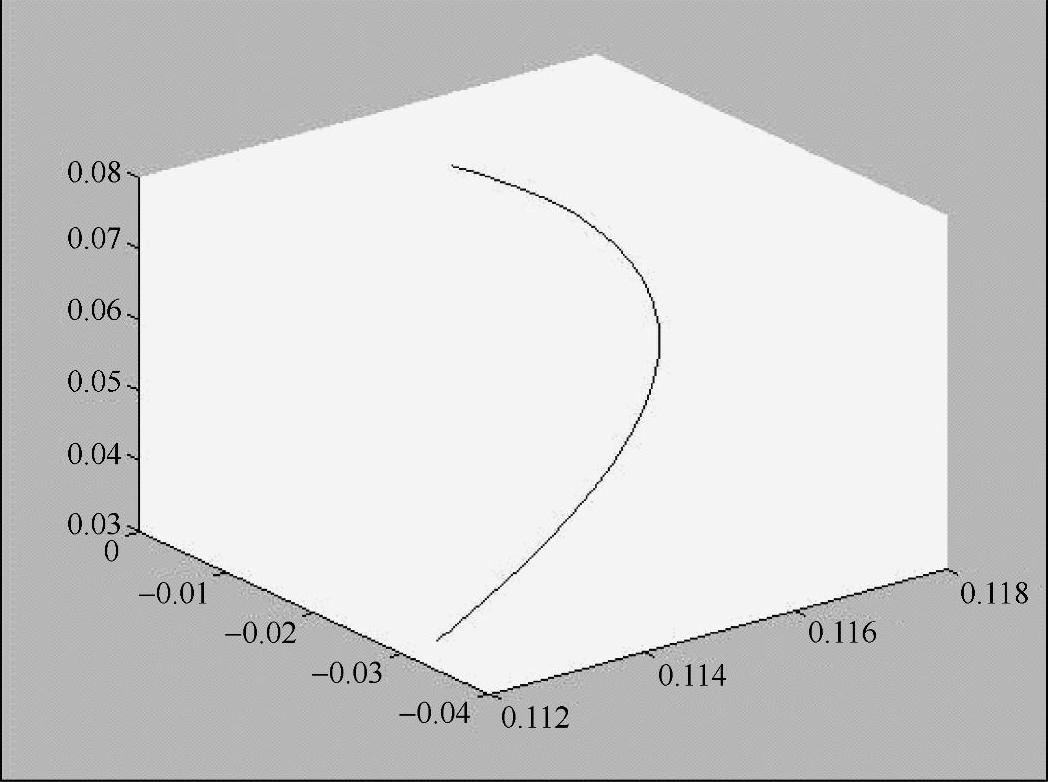
图2-20 眼球位移变化三维图
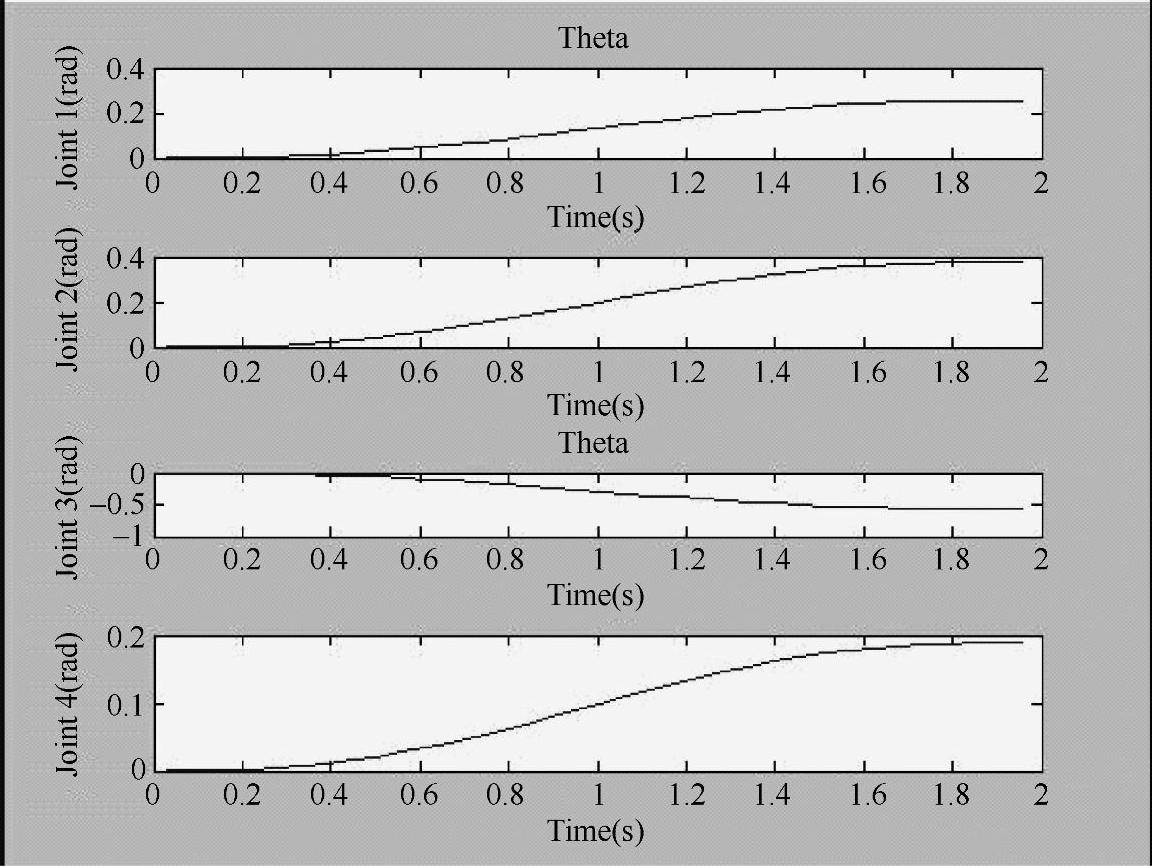
图2-21 各关节变量变化
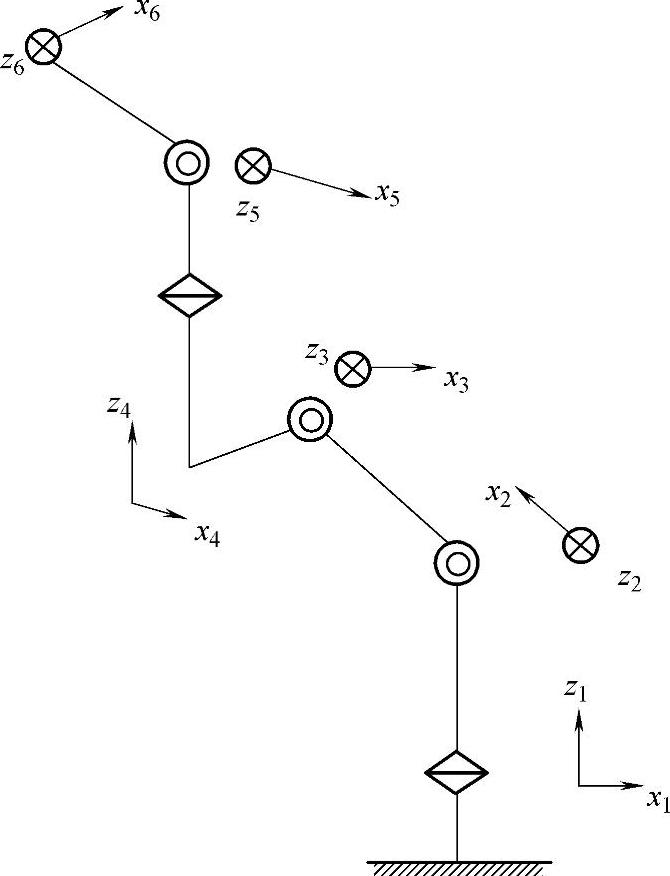
图2-22 机器人眼睑正运动学坐标系
两杆间的位姿矩阵,根据参数表和D-H公式可得
将各个连杆矩阵连乘得到61T
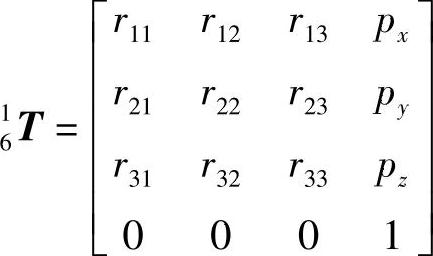
式中
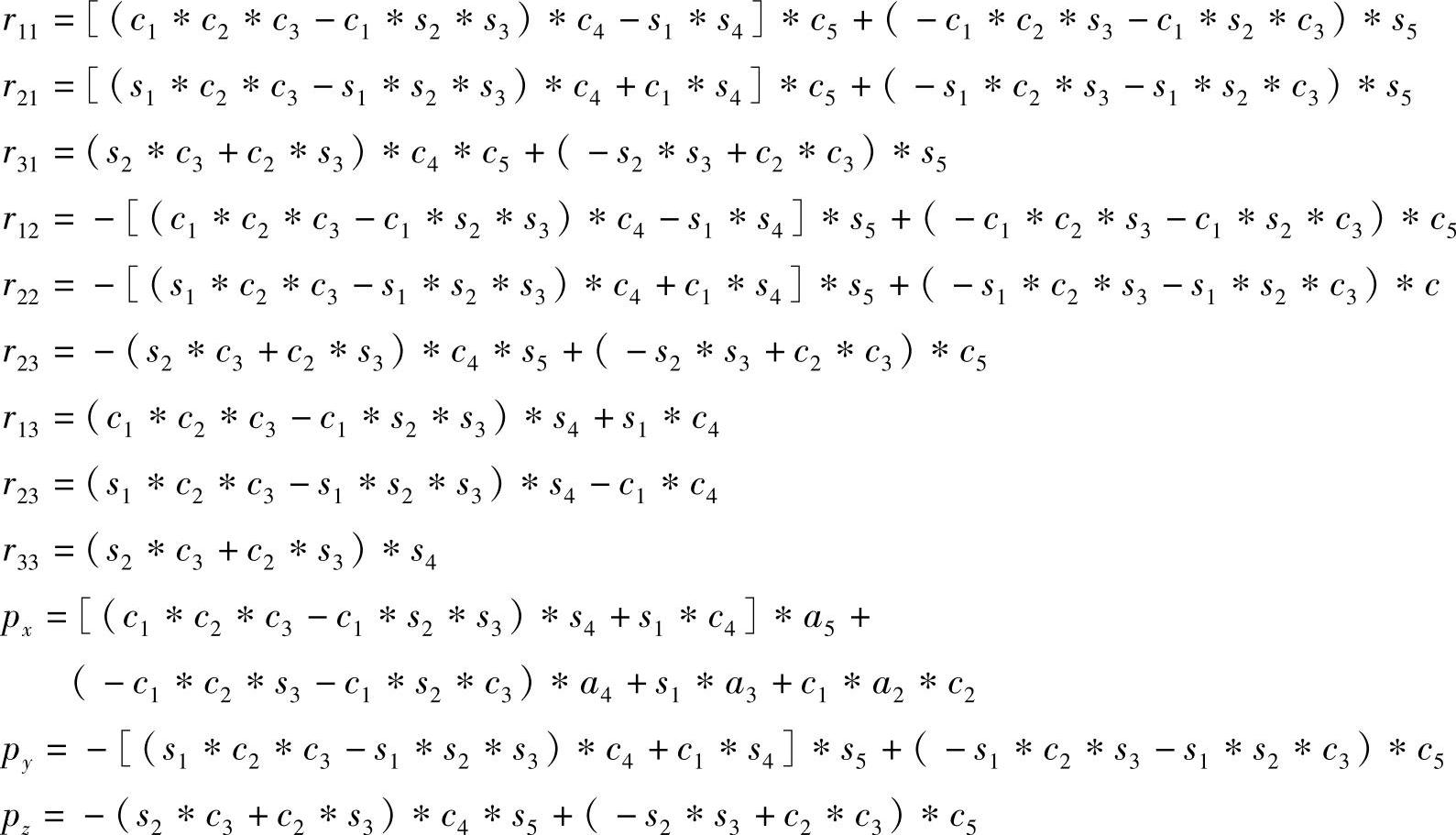
其中ci=cosθi(i=1,2,3,4,5);si=sinθi(i=1,2,3,4,5)
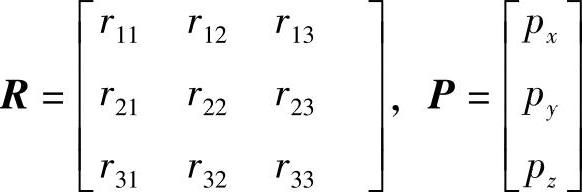
于是可得眼球作为末端执行器的姿态和位置分别是
机器人眼睑的运动仿真与眼球运动学仿真类似,可得如图2-23所示模型。

图2-23 机器人眼睑运动仿真图
其他仿真与以上两种仿真类似,至于其他运动部位都较眼球和眼帘运动简单,最多三个串联关节。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。