



1.眼球的设计
我们给眼部的设计自由度是6个,每只眼球3个自由度,包括眼球的上下运动、眼球的左右运动和眼睑的开合。由于眼部结构复杂、空间紧凑、动作相对比较灵活、运动机率较高,因此选用台湾产的带金属齿轮MICRO 2BB MG型号的小舵机。为保证机器头的颈部舵机能带动整个头部运动(点头和摇头),颈部的材质应选用硬铝(LY12),既可满足强度要求又能减轻重量。机械结构设计三维图如图2-7所示。
结构的原理是:舵机4和舵机5利用配套件直接与眼球连在一起,直接控制眼球沿左右方向运动,理论上转动角度可以达到180°,但实际上的运动幅度可能只需要30°。舵机2通过一个四杆机构(包括电机配套件,底座,拉杆和动支杆),这样一个舵机就可以控制2个眼球的上下方向转动,一个舵机完成了2个自由度的控制,在实现必要功能的情况下节省了许多空间。舵机1和舵机3用来控制眼睑的运动。眼睑闭合和张开也利用一个四杆机构来实现,机构件主要包括电动机配套件、连杆、眼睑和底座,动作非常灵活。眼部的动作如图2-8所示。
2.颈部的设计
图2-9所示为颈部二维装配图,其中的舵机选择HG14-M型号舵机。由于整个头部的机械结构相对来说比较重,所以对颈部的设计采用了两个51104的推力球轴承来承担轴向力。使用轴承的另一个好处是轴承圈和滚珠之间是高副连接,比普通的低副连接受到的摩擦阻力要小得多,因而对电动机的力矩要求大大降低,对控制系统有一定好处。
头部的整体支架是用硬铝加工而成,对头部起整体支撑作用。上面安装了眉头舵机、嘴部舵机和眼部底板等。
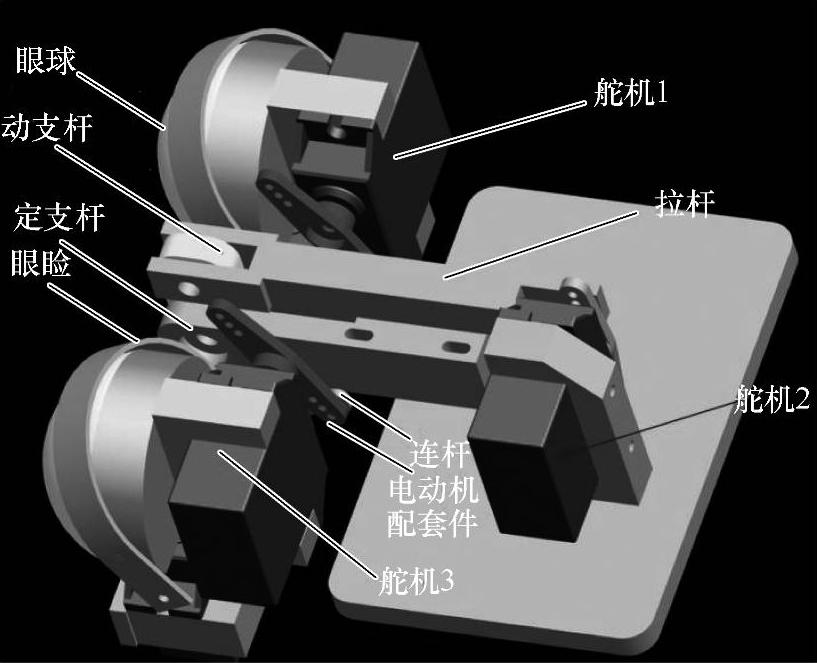
图2-7 机械结构设计三维图
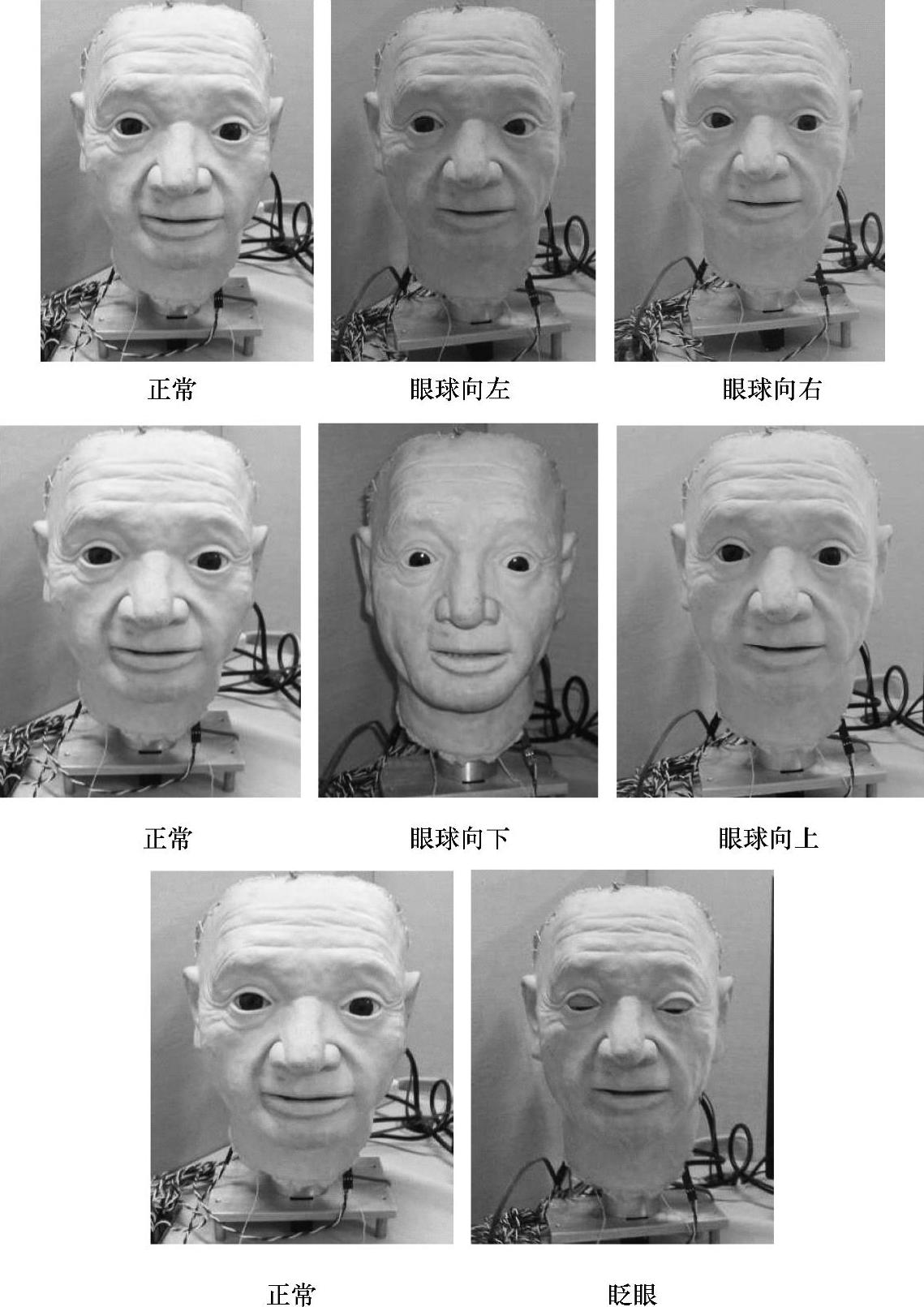
图2-8 眼部的各种动作实现
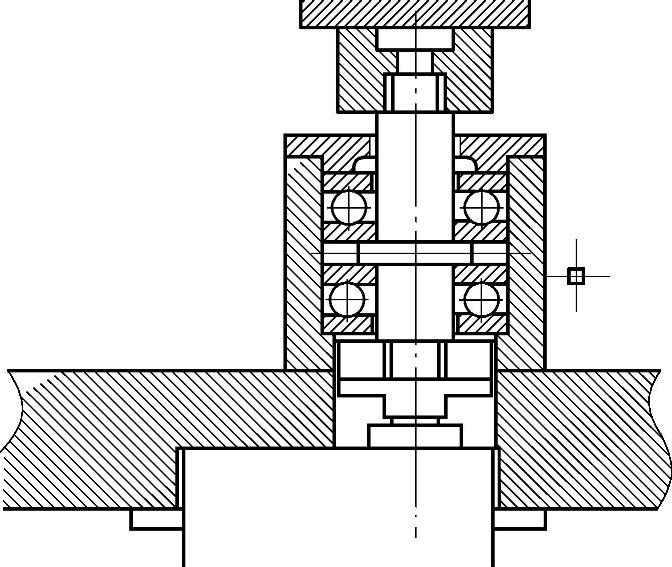
图2-9 颈部二维装配图(https://www.xing528.com)
3.眉头的设计
眉头部分的自由度有两个:眉毛向上挑和皱眉。眉头运动是通过舵机的舵盘拉动硅胶面皮的眉头部分实现的。由于面皮材料的弹性不是很好,因此眉头部分的拉动在图片中的幅度也不是很大,如图2-10所示。
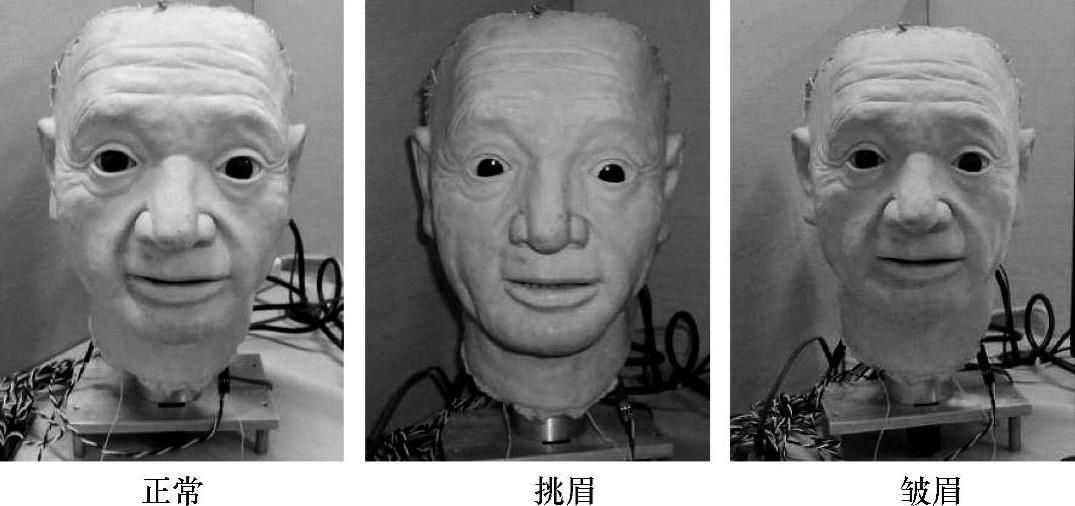
图2-10 眉头部分的动作实现
4.嘴部的设计
嘴部运动是通过张嘴和嘴角拉动来实现的。舵机带动连杆,使连杆上的下牙片带动面皮的下颌实现嘴巴张开、闭合。上牙片和下牙片上都固定按人比例制作的假牙、假牙床。嘴角的运动和眉毛的运动原理是一样的,也是通过拉线的方式完成。图2-11所示为张嘴动作实现的三维图,图2-12所示为嘴部表现出正常、嘴角拉动及张嘴的形态。
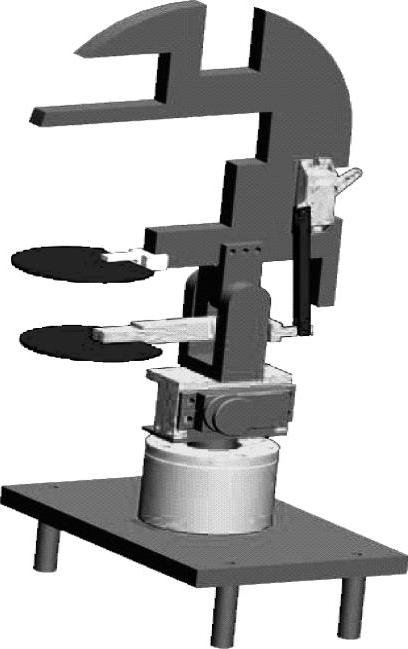
图2-11 张嘴动作的实现
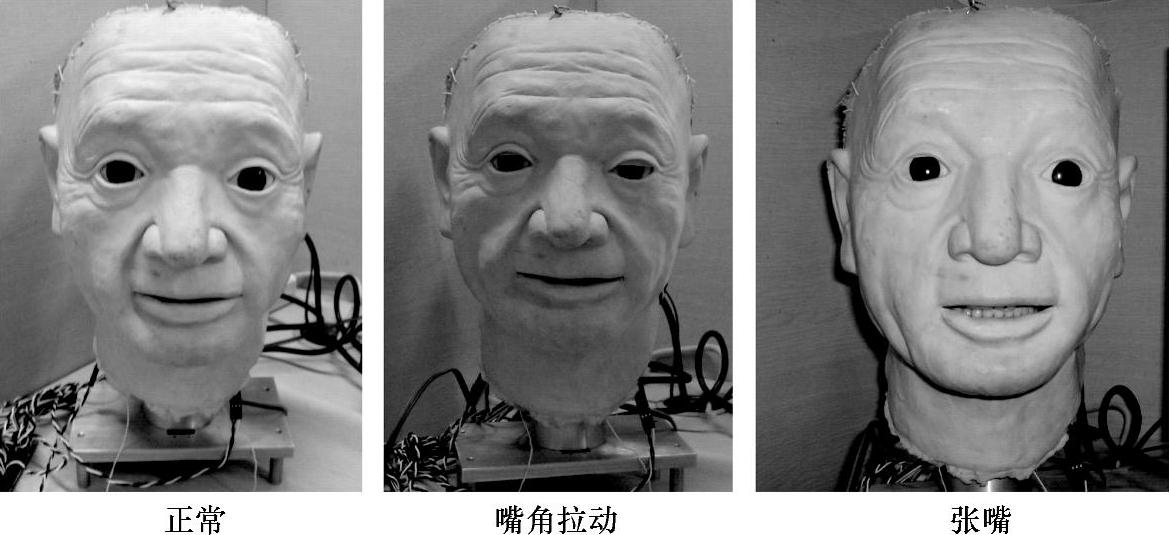
图2-12 嘴部的动作实现
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。