



情感机器人所涉及的关键技术及主要内容可以由图1-11直观地显示出来,每个关键技术及理论都将会在本书中进行详细介绍。
1.表情头的设计
对于一个具有类人情感的机器人来说,不仅需要能够进行情感表示的一系列程序,而且需要能够进行情感表现的一系列面部表情和肢体语言。其中,面部表情的展现更能直接迅速地进行人机交互。因此,表情机器人的头部设计至关重要。情感机器人获取信息,经过信息处理由表情机器头来呈现其内在的情感状态,如微笑、苦恼、快乐或者惊吓等表情,使电子技术与机械技术和谐统一,最终使得人与机器人自然流畅地进行情感交流。同时,除了头部表情以外,机器人的肢体动作也能传达其内在的情感,这两部分将在本书第2章《机器头及身躯设计》中进行详细讲解。
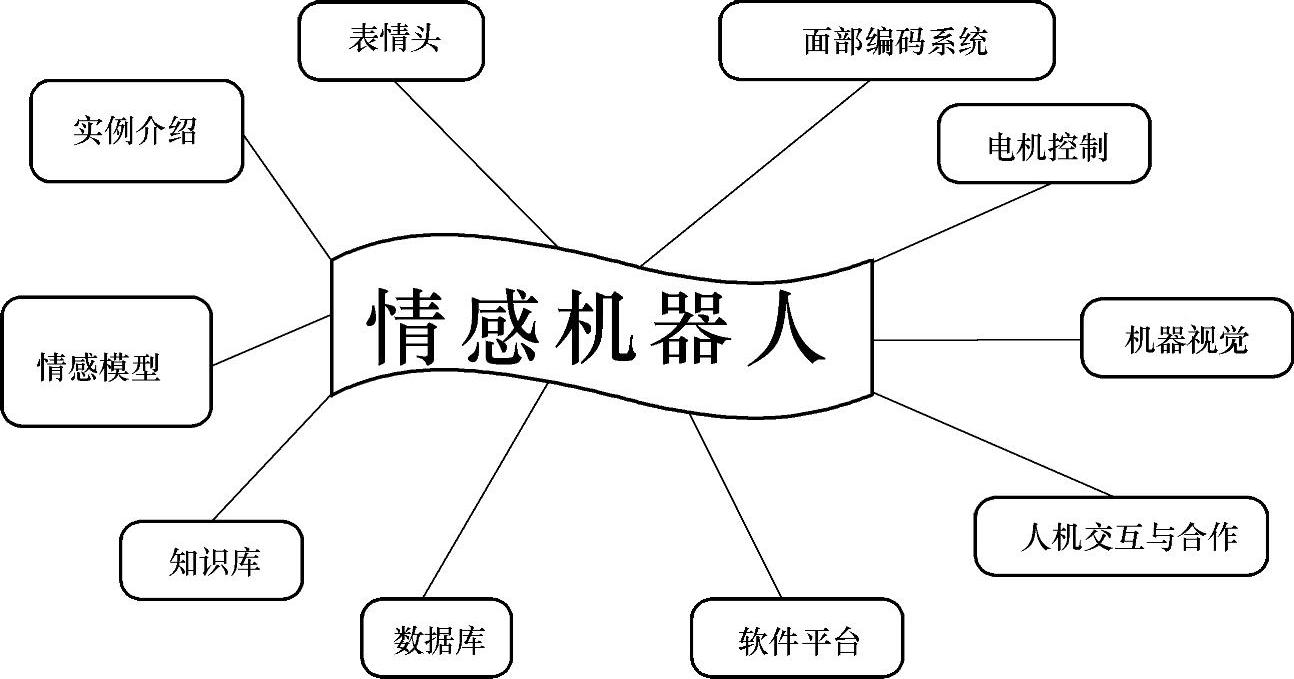
图1-11 情感机器人涉及的相关技术及理论
2.面部动作编码系统理论
当机器人的表情头设计好之后,需要有理论来支持其在何种情况下做出何种表情。例如,只要知道一个人的脸在正常状态下是什么样子,通过对方的表情变化,就能够像读一本翻开的书那样了解对方。72岁的美国心理学教授保罗·艾克曼用了40年的时间研究欺骗和伪装,在20世纪60年代,他在两个互相隔离的原始部落研究他们的动作和手势,最终发现了人类共通的特性,并发布了“面部动作编码系统”(Facial Action Coding System,FACS):他在人的脸上发现43种动作单元,每一种都由一块或者几块肌肉的运动构成,各种动作单元之间可以自由组合,也就是说,人脸上可能有1万种表情,其中的3000种具有一个情感意义。
情感机器人面部表情的机械设计就是以保罗·艾克曼教授的FACS为理论基础,情感机器人的头部由舵机来驱动,各特征点运动合成机器人的面部表情。FACS理论认为,当人表现出惊奇时,会将眉毛抬起变高变弯,眉毛的皮肤也会被拉伸;眼睛会睁大,上眼睑会被抬高;而脸的下颚下落,嘴也会张开。如果以此种方式拉伸情感机器人的面部肌肉,便会得到一张惊讶的脸孔。关于面部编码系统的介绍以及其在情感机器人中的应用将在本书第3章“表情控制模式”中进行详细讲解。
3.电动机控制
情感机器人是如何做出类人的丰富面部表情的呢?答案是由电动机来控制情感机器人的头部和身躯的动作,因此研究电动机的控制是必不可少的环节。情感机器人使用的电动机在满足必要的输出力矩和输出速度的同时,还要使机械结构紧凑、传动精度和效率较高,以满足机构速度和承载能力的要求。电动机的选择至关重要,电动机选择的好坏甚至直接关系到情感机器人动作表现的成功或失败。关于电动机控制的详细内容将在本书第4章“电动机控制”中进行详细讲解。
4.机器视觉
所谓机器视觉,就是用机器代替人眼来做测量和判断工作。机器视觉系统是指通过机器视觉产品(即图像摄取装置,包括CMOS和CCD两种)将被捕捉目标转换成图像信号,传送给专用的图像处理系统,再根据像素分布和亮度、颜色等信息,转变成数字化信号;图像处理系统对这些信号进行各种运算来抽取目标的特征,进而根据判别结果来控制现场设备的动作。
在情感机器人的设计中,通过机器人的眼睛(摄像头或照相机)将被检测的目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号。图像处理系统通过对这些信号进行运算来抽取目标的特征,如面积、数量、位置、长度等特征,再根据预设的允许度和其他条件输出结果,实现自动识别功能。利用机器视觉的相关技术来解决机器人采集目标特征的详细内容将在本书第5章“机器视觉”中进行详细讲解。(https://www.xing528.com)
5.人机交互与合作技术
所谓的人机交互技术(Human-Computer Interaction Techniques)是指通过计算机输入、输出设备,以有效的方式实现人与计算机对话的技术。其中包括机器通过输出或显示设备给人提供大量有关信息及提示请示等,人通过输入设备给机器输入有关信息及提示请示、回答问题等。人机交互技术是计算机用户界面设计中的重要内容之一。它与认知学、人机工程学、心理学等学科领域有着密切的联系。
如果希望人与情感机器人进行和谐智能的交互合作,就需要赋予情感机器人听觉与视觉智能,使计算机能认识交互的对象,理解以语言形式表达的说话内容,理解交互对象的情感,按人的要求进行工作,或回答人提出的问题,以达到交互的目的。有关人与情感机器人交互的详细内容将在本书第6章“人机交互与合作”中进行讲解。
6.机器人软件平台设计
人与情感机器人交互与合作的研究,不能仅限于理论阶段,还需要有一套完整的软件平台进行实际操作。本书第7章“软件集成”介绍了情感机器人软件交互平台的设计,此设计采用模块化的设计思想:将每一个功能的程序代码封装成一个独立的模块,再将这些相对独立的功能模块集成到软件平台中。这样程序的结构清晰、接口简单,提高了功能模块的扩展性。
7.数据库与知识库的建立
数据库离我们的生活越来越近,图书馆的藏书、公交卡、饭卡及病例资料等都是通过数据库来进行管理的。对于人类本身而言,我们用大脑来记忆存储此刻之前的数据、知识等。因此,对于完整的智能机器人系统来讲,其内部也必须有存储数据和知识的部分,这就是数据库与知识库。关于数据库和知识库是如何进行存储数据和知识的内容将在本书第8章“数据库技术”和第9章“知识库技术”中进行详细讲解。
8.情感模型及机器学习
机器人在某一刻情感的产生,需要对外界环境、自身情感状态、人类语言、肢体动作、面部表情等综合的信号分析。这就需要对机器人的情感状态进行建模,因此情感算法的地位也就不言而喻了。目前国内外已经研究使用了众多情感建模算法,详细内容将在本书第10章“情感模型和机器学习”中介绍。
9.情感机器人实例介绍
通过对以上知识和技术的讲解,我们已经可以建立起一个相对完整的情感机器人体系结构,那么研究情感机器人的目的是什么呢?情感机器人到底适合在什么场合应用呢?答案不尽相同,由于情感机器人特有的情感特质,其可以用于智能家居,可以用于老人看护;还可以用于网络教学系统,方便远程教学;也可以做成可爱的模型当做儿童玩伴,提高儿童对科技的兴趣;还可以辅助治疗自闭症儿童;同时也可以作为服务机器人服务特定的人群等。关于情感机器人的应用实例我们在本书的第11章中可以看到详细的内容。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。