



直到1959年美国的英格伯格和德沃尔制造出世界上第一台工业机器人,现代机器人的历史才真正开始。
英格伯格在大学攻读伺服理论,这是一种研究运动机构如何才能更好地跟踪控制信号的理论。德沃尔曾于1946年发明了一种系统,可以“重演”所记录的机器的运动。1954年,德沃尔又获得可编程机械手专利,这种机械手臂按程序进行工作,可以根据不同的工作需要编制不同的程序,具有良好的通用性和灵活性,英格伯格和德沃尔都在研究机器人,认为汽车工业最适于用机器人干活,因为是用重型机器进行工作,且生产过程较为固定。
1959年,英格伯格和德沃尔联手制造出第一台工业机器人。由英格伯格负责设计机器人的“手”、“脚”、“身体”,即机器人的机械部分和完成操作部分;由德沃尔设计机器人的“头脑”、“神经系统”、“肌肉系统”,即机器人的控制装置和驱动装置。它成为世界上第一台真正的实用工业机器人。
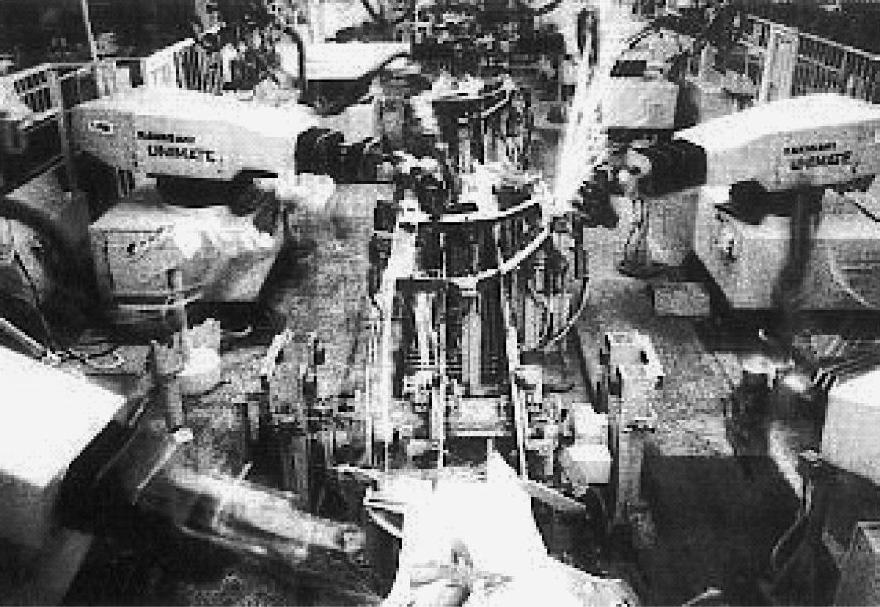
图1-1 世界上第一台工业机器人“尤尼梅特”正在生产线上工作
这种机器人外形有点像坦克炮塔,基座上有一个大机械臂,大臂可绕轴在基座上转动,大臂上又伸出一个小机械臂,它相对大臂可以伸出或缩回。小臂顶有一个腕子,可绕小臂转动,进行俯仰和侧摇。腕子前头是手,即操作器。这个机器人的功能和人的手臂功能相似,如图1-1所示。
它成为世界上第一台真正的实用工业机器人。此后英格伯格和德沃尔成立了“Unimation”公司,兴办了世界上第一家机器人制造工厂,第一批工业机器人被称为“尤尼梅特(UNIMATE)”,意思是“万能自动”,他们也因此被称为机器人之父。1962年美国机械与铸造公司也制造出工业机器人,称为“沃尔萨特兰(VERSTRAN)”,意思是“万能搬动”。“尤尼梅特”和“沃尔萨特兰”就成为世界上最早的、至今仍在使用的工业机器人。
机器人的发展史主要分为三大阶段,如图1-2所示。
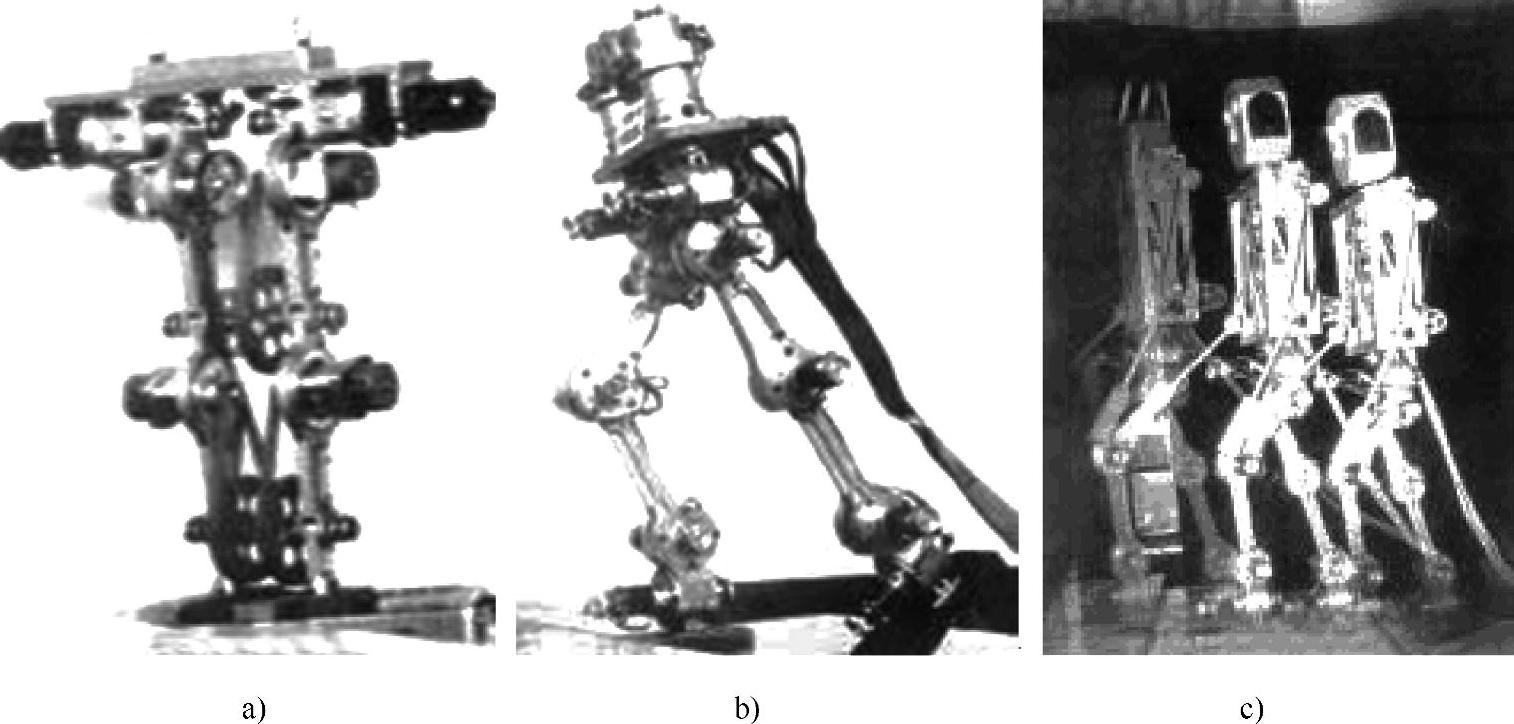
图1-2 三代机器人示例(https://www.xing528.com)
a)第一代机械臂 b)第二代机器人 c)第三代机器人
1.第一代机器人
第一代是示教再现型机器人:“尤尼梅特”和“沃尔萨特兰”这两种最早的工业机器人是示教再现型机器人的典型代表。它由人操纵机械手做一遍应当完成的动作或通过控制器发出指令让机械手臂动作,在动作过程中机器人会自动将这一过程存入记忆装置。当机器人工作时,能再现人教给它的动作,并能自动重复地执行。这类机器人不具有外界信息的反馈能力,很难适应变化的环境。英格伯格和德沃尔制造的工业机器人是第一代机器人,属于示教再现型,即人手把着机械手,把应当完成的任务做一遍,或者人用“示教控制盒”发出指令,让机器人的机械手臂运动,一步一步完成它应当完成的各个动作。
2.第二代机器人
第二代是有感觉的机器人:它们对外界环境有一定感知能力,并具有听觉、视觉、触觉等功能。机器人工作时,根据感觉器官(传感器)获得的信息,灵活调整自己的工作状态,保证在适应环境的情况下完成工作。如有触觉的机械手可轻松自如地抓取鸡蛋,具有嗅觉的机器人能分辨出不同饮料和酒类。
3.第三代机器人
第三代机器人是智能机器人,它不仅具有感觉能力,而且还具有独立判断和行动的能力,并具有记忆、推理和决策的能力,能够完成更加复杂的动作。中央电脑控制手臂和行走装置,使机器人的手完成作业,脚完成移动,机器人能够用自然语言与人对话。智能机器人的“智能”特征就在于它具有与外部世界——对象、环境和人相适应、相协调的工作机能。从控制方式看,智能机器人不同于工业机器人的“示教、再现”,不同于遥控机器人的“主—从操纵”,而是以一种“认知—适应”的方式自律地进行操作。
智能机器人在发生故障时,通过自我诊断装置能自我诊断出故障部位,并能自我修复。如今,智能机器人的应用范围大大地扩展了,除工农业生产外,机器人应用到各行各业,机器人已具备了人类的特点。机器人向着智能化、拟人化方向发展的道路,是没有止境的。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。