



下面以三菱FX2N系列PLC为例,介绍PLC的基本指令。三菱FX2N系列PLC共有基本指令27条,初学者应熟悉这些基本指令的功能,并掌握由梯形图转化成指令表,指令表转化成梯形图的方法。
1.逻辑取及驱动指令(LD、LDI、OUT)
LD,逻辑取指令,表示每一行程序中第一个与左母线相连的常开触点。
LDI,取反指令,与LD的用法相同,只是LDI是对常闭触点。
LD、LDI两条指令的目标元件是X、Y、M、S、T、C。
OUT,线圈驱动指令。是对输出继电器(Y)、辅助继电器(M)、状态器(S)、定时器(T)、计数器(C)的线圈驱动,与右母线相连,对输入继电器(X)不能使用。
LD、LDI、OUT指令的使用说明如图5-18所示。
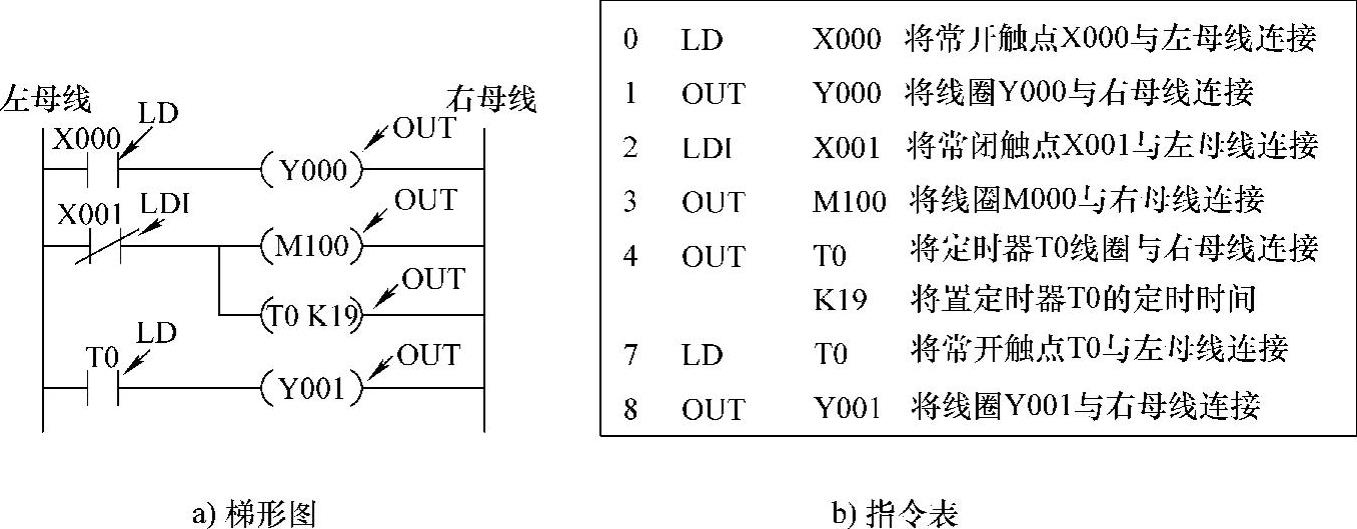
图5-18 LD、LDI、OUT指令的使用说明
2.触点串联指令(AND、ANI)
用于单个常开触点的串联。
ANI,与非指令。用于单个常闭触点的串联。
AND与ANI都是一个程序步指令,对串联触点的个数没有限制,该指令可以多次重复使用。使用说明如图5-19所示。这两条指令的目标元件为X、Y、M、S、T、C。
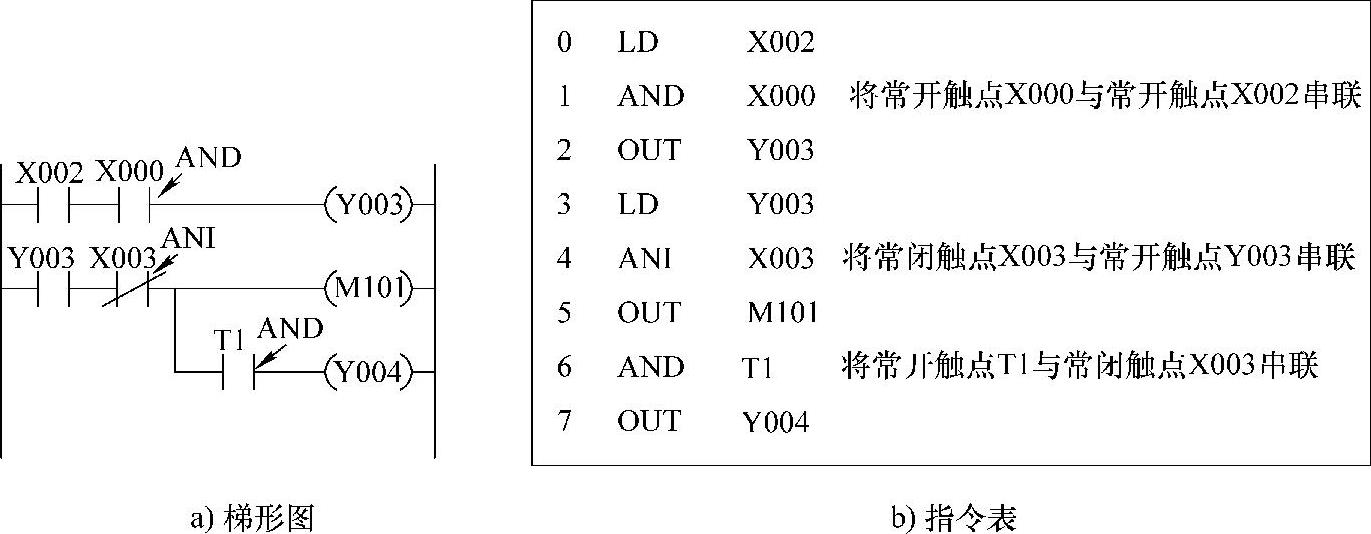
图5-19 AND、ANI指令的使用说明
3.触点并联指令(OR、ORI)
OR,常开触点并联指令,又称或指令,其功能是将常开触点与上一个触点并联。
ORI,常闭触点并联指令,又称或非指令,其功能是将常闭触点与上一个触点并联。
这两条指令都用于单个的触点并联,操作的对象是X、Y、M、S、T、C。OR是用于常开触点,ORI用于常闭触点,并联的次数可以是无限次。使用说明如图5-20所示。
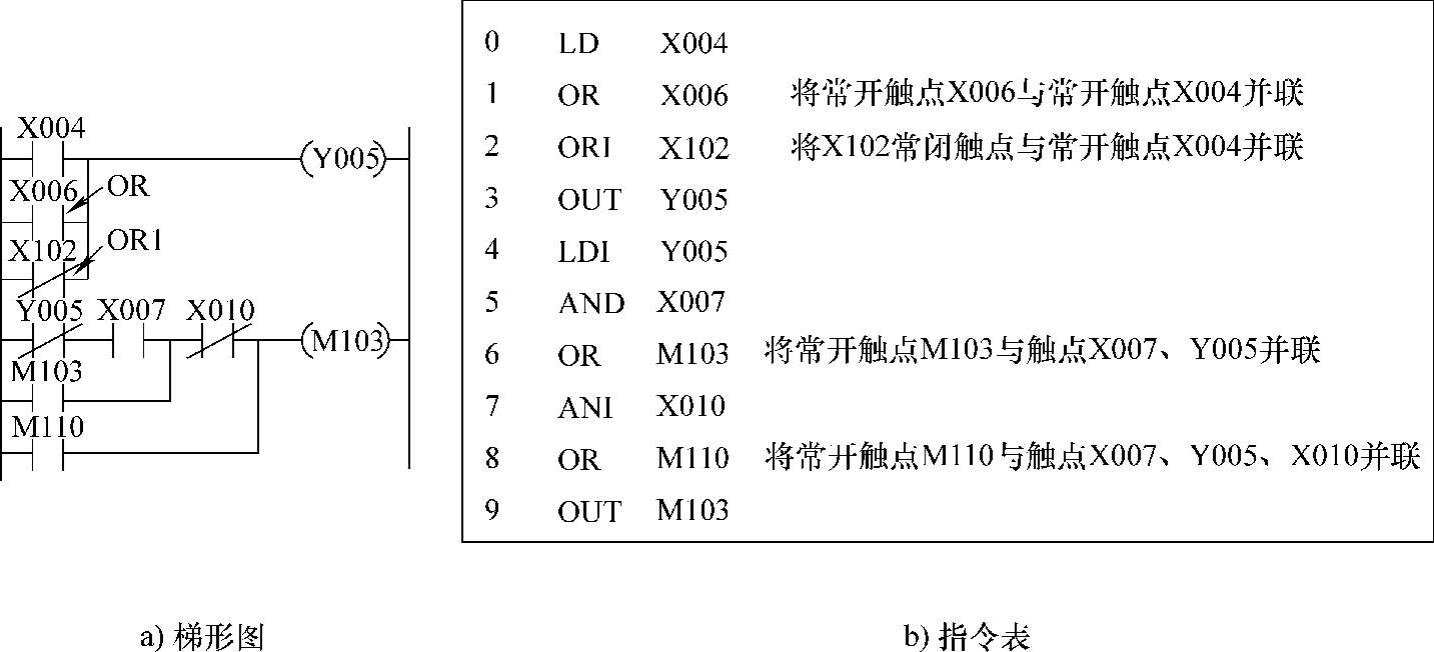
图5-20 OR、ORI指令的使用说明
4.取脉冲指令(LDP、LDF、ANDP、ANDF、ORP、ORF)
LDP、ANDP、ORP指令是进行上升沿检测的触点指令,仅在指定的位元件上升沿(即由OFF→ON变化)时,接通一个扫描周期,操作的目标元件是X、Y、M、S、T、C。使用说明如图5-21所示。
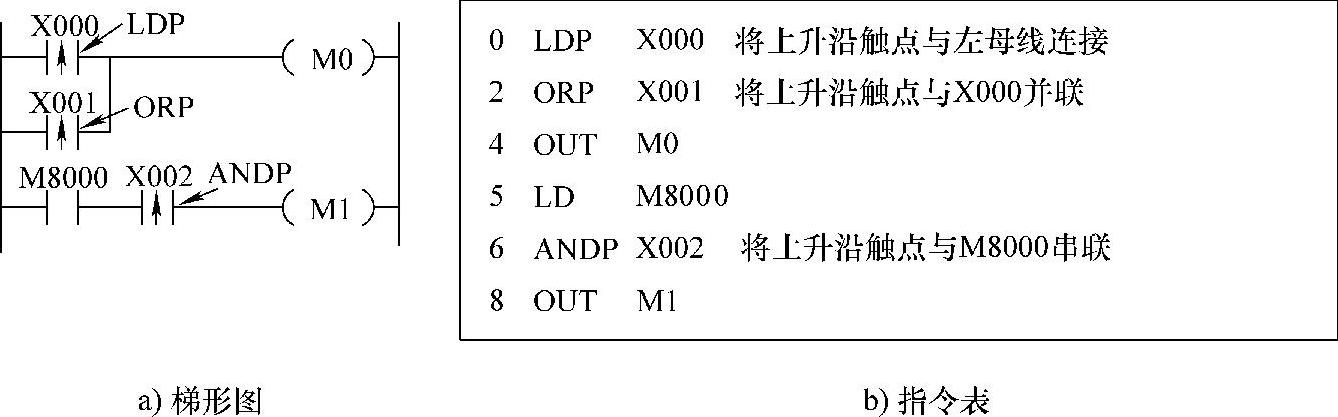
图5-21 LDP、ANDP、ORP指令的使用说明
LDF、ANDF、ORF指令是进行下降沿检测的触点指令,仅在指定位元件下降沿(即由ON→OFF变化)时,接通一个扫描周期。操作的目标元件是X、Y、M、S、T、C。使用说明如图5-22所示。
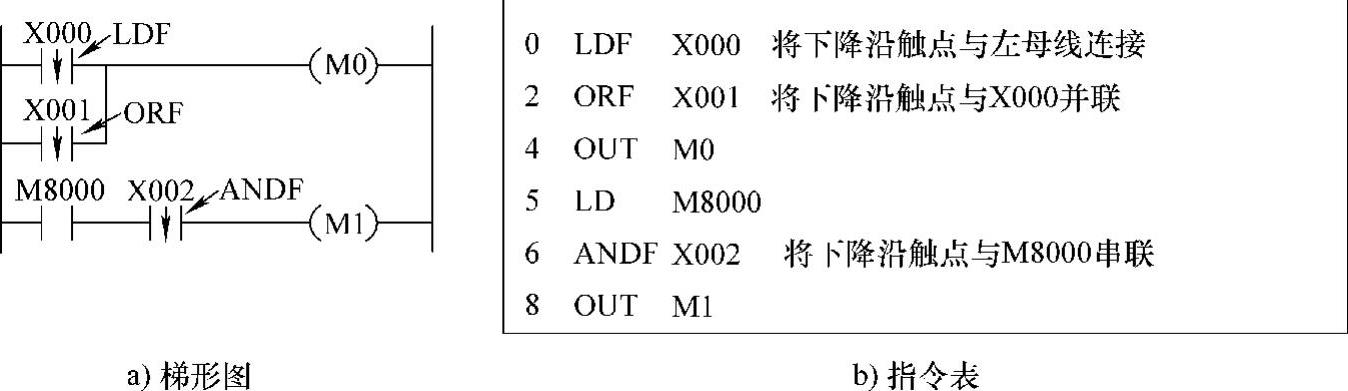
图5-22 LDF、ANDF、ORF指令的使用说明
5.串联电路块并联指令(ORB)
两个或两个以上的触点串联的电路称为串联电路块。当串联电路块和其他电路并联连接时,分支开始用LD、LDI。分支结束用ORB。ORB指令和后面的ANB指令是不带操作数的独立指令。电路中有多少个串联电路块就用多少次ORB,ORB使用的次数不受限制。
ORB指令也可成批使用,但是LD、LDI指令的重复使用次数限制在8次以下,请务必注意。ORB指令使用说明如图5-23所示。
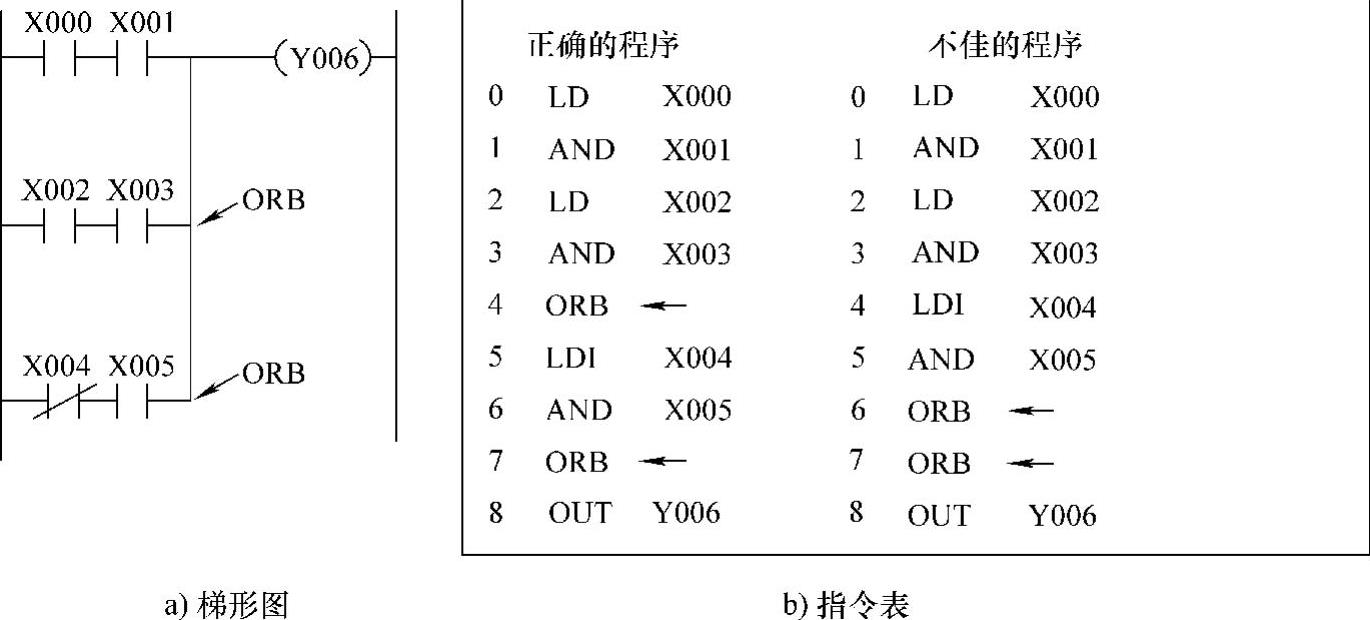
图5-23 ORB指令的使用说明
6.并联电路块的串联连接指令(ANB)
两个或两个以上触点并联的电路称为并联电路块。并联电路块和其他触点串联连接时,使用ANB。电路块的起点用LD、LDI指令,并联电路块结束后,使用ANB指令与前面串联。ANB指令是无操作目标元件的指令。ANB指令的使用说明如图5-24所示。
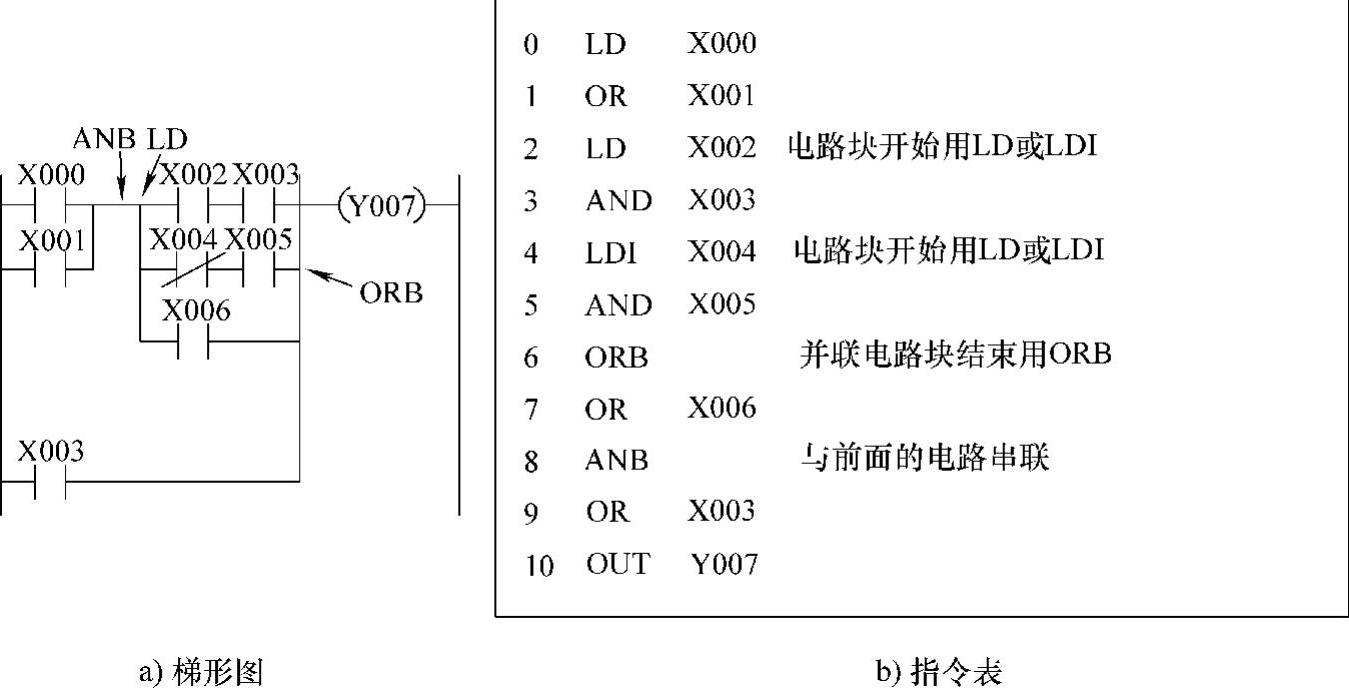
图5-24 ANB指令的使用说明
7.多重输出指令(MPS、MRD、MPP)
MPS,进栈指令。
MRD,读栈指令。
MPP,出栈指令。
在三菱FX2N系列PLC中有11个存储器,它们用来存储运算的中间结果,被称为栈存储器。使用1次MPS指令就将此时的运算结果送入栈存储器的第1段。再使用MPS指令,又将此时刻的运算结果送入栈存储器的第1段,而将原先存入的数据依此移到栈存储器的下一段。
使用MPP指令,各数据按顺序向上移动,将最上段的数据读出,同时该数据就从栈存储器中消失。MRD是读出最上段所存的最新数据的专用指令,栈存储器内的数据不发生移动。(https://www.xing528.com)
这些指令都是不带操作数的独立指令。MPS、MRD、MPP的使用说明如图5-25、图5-26所示。
使用多重输出指令时应注意以下几点:
(1)MPS和MPP指令必须成对使用,缺一不可,MRD指令有时根据情况可不用。
(2)若MPS、MRD、MPP指令后有单个常开或常闭触点串联,要使用AND或ANI指令,如图5-25指令语句表中的第5、6步。
(3)若电路中有电路块串联或并联,要使用ANB或ORB指令,如图5-26指令语句表中的第4、11、12、19步。
(4)MPS、MPP连续使用次数最多不能超过11次,这是因为栈存储器只有11个存储单元。
(5)若MPS、MRD、MPP指令后无触点串联,直接驱动线圈,要使用OUT指令,如图5-25所示指令语句表中的第8步。
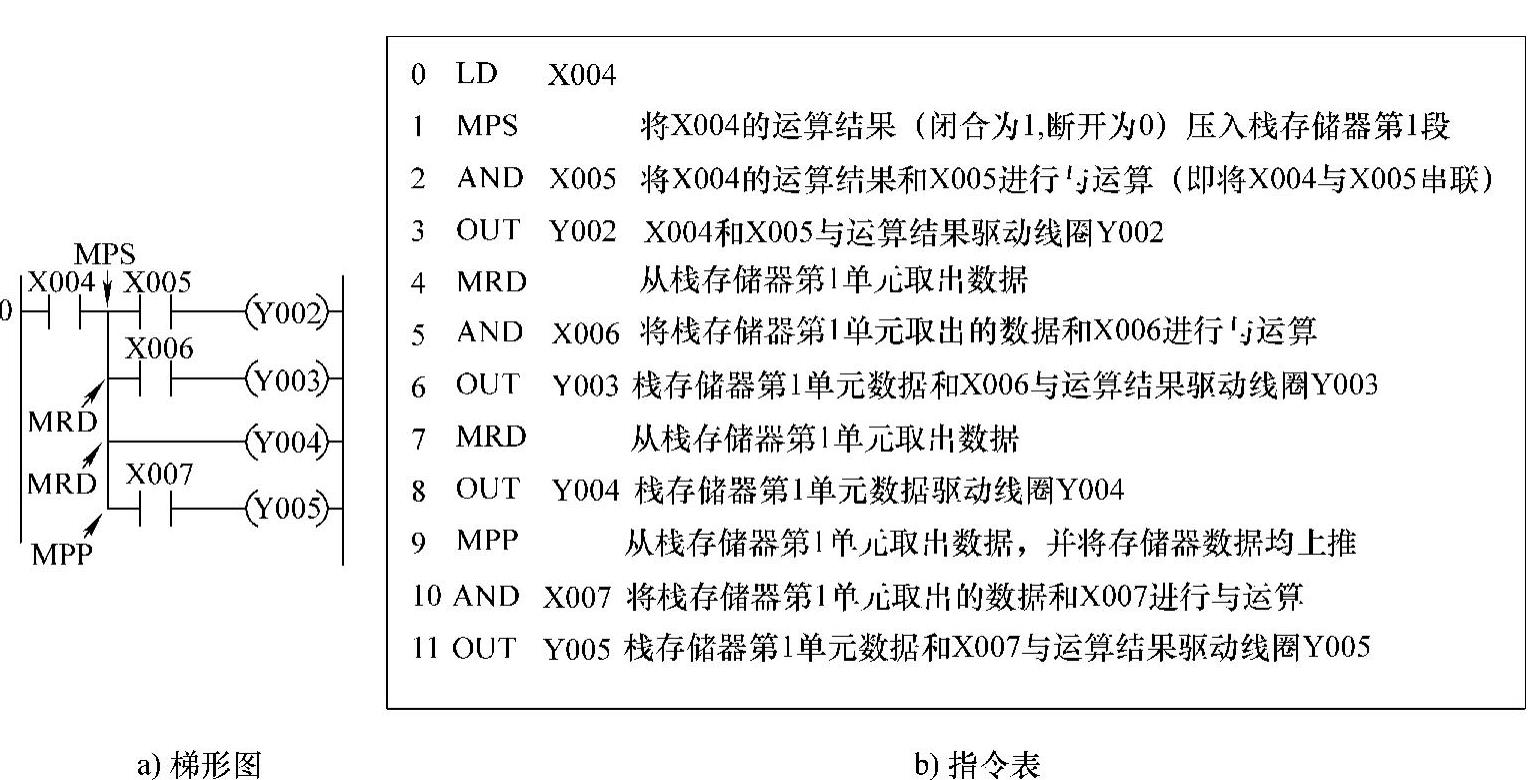
图5-25 MPS、MRD、MPP的使用说明举例一
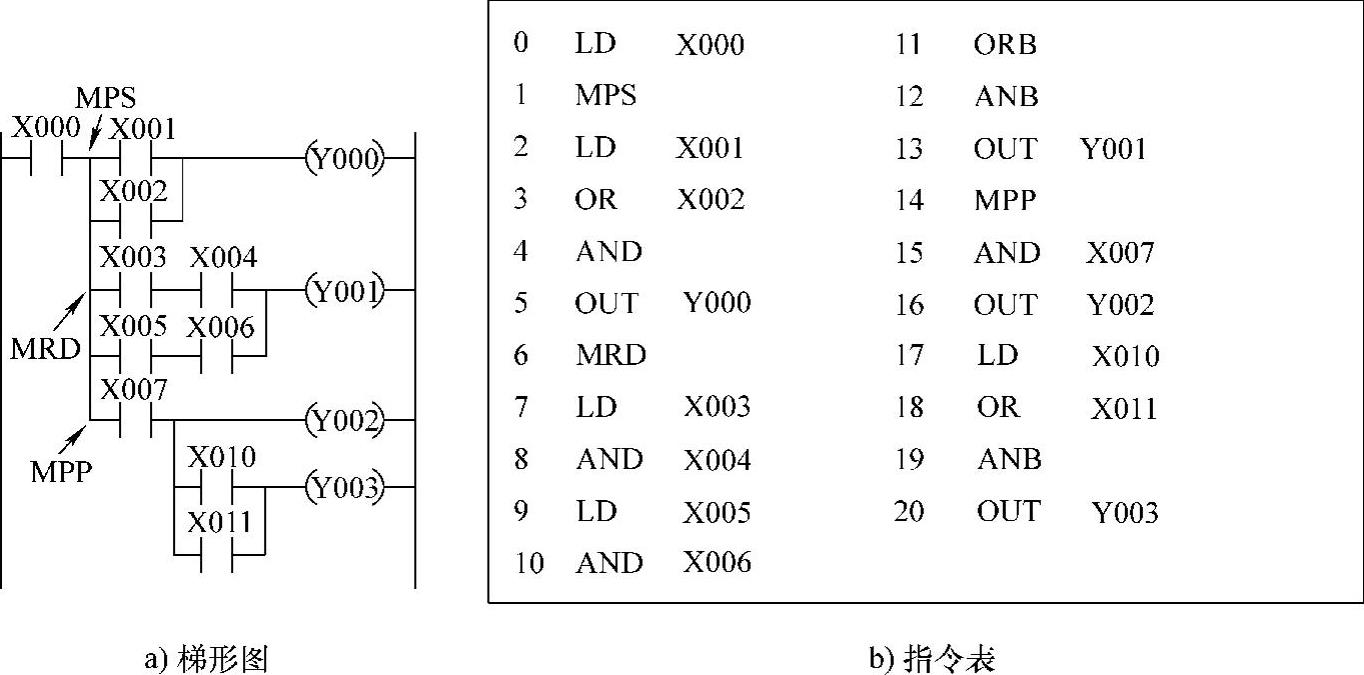
图5-26 MPS、MRD、MPP的使用说明举例二
8.主控及主控复位指令(MC、MCR)
MC主控指令,用于公共串联触点的连接。
MCR主控复位指令,用于公共串联触点的清除。
MC主控指令操作由两部分组成;第一部分是主控指令使用的次数,也称主控嵌套层数,用N0~N7表示,通常按顺序从小到大使用;第二部分是操作元件,操作元件通常为输出继电器Y或辅助继电器M,但不能是特殊继电器。
MCR主控复位指令操作次数必须与MC的次数相同,在按由小到大顺序多次使用MC指令时,必须按由大到小相反的次数使用MCR返回。
通过更改操作元件Y或M的地址号,可多次使用主控指令,但不同的主控指令不能使用同一操作元件的地址号,否则就双线圈输出。MC、MCR指令使用说明如图5-27所示。
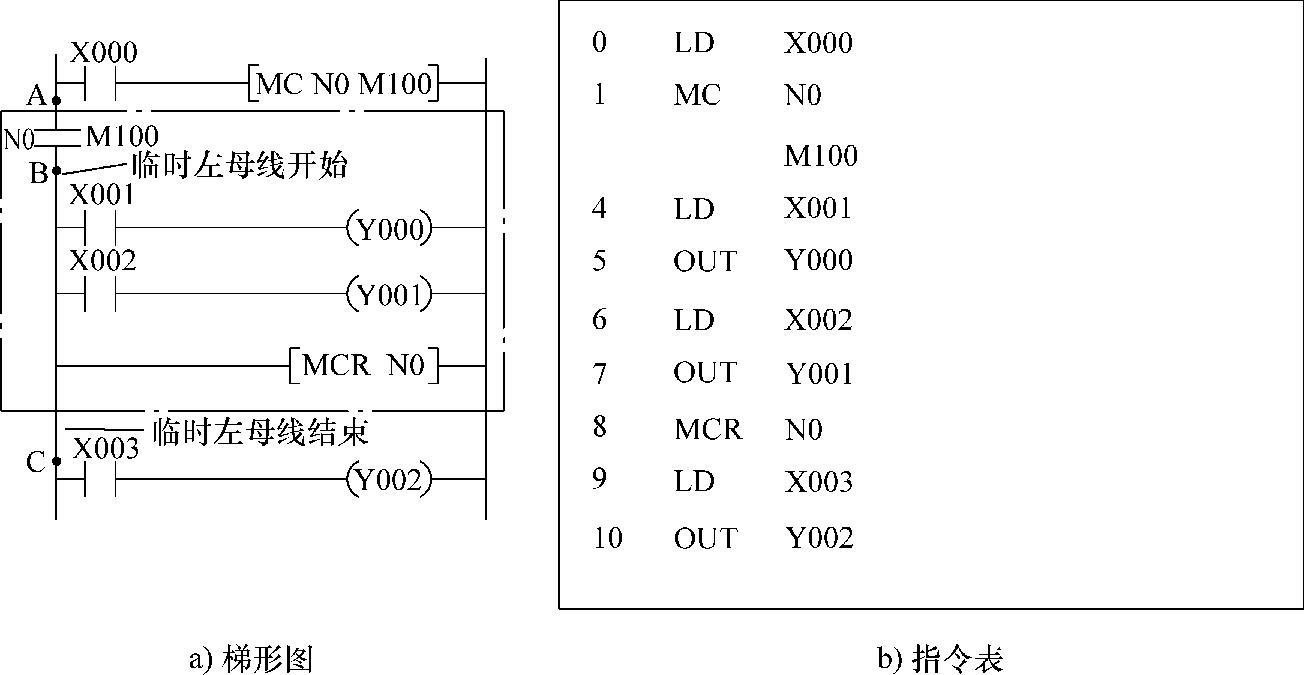
图5-27 MC、MCR指令的使用说明
9.取反指令(INV)
INV取反指令是在将执行INV指令之前的运算结果反转的指令,是不带操作数的独立指令。使用说明如图5-28所示。当X000断开,则Y000接通,如果X000接通,则Y000断开。在绘制梯形图时,取反指令用斜线表示。
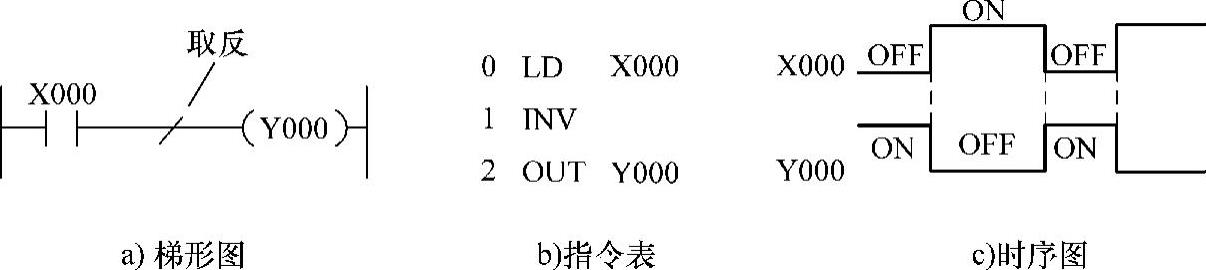
图5-28 INV指令的使用说明
10.置位与复位指令(SET、RST)
SET为置位指令,使动作保持;RST为复位指令,使操作保持复位。SET、RST指令的使用说明如图5-29所示。由波形图5-28c可见,当X000接通,即使再变成断开,Y000也保持接通。X001接通后,即使再断开,Y000也将保持断开。SET指令的操作元件为输出继电器Y或辅助继电器M、状态继电器S,而RST指令的操作元件除Y、M、S外还有计算定时器T和计数器C。
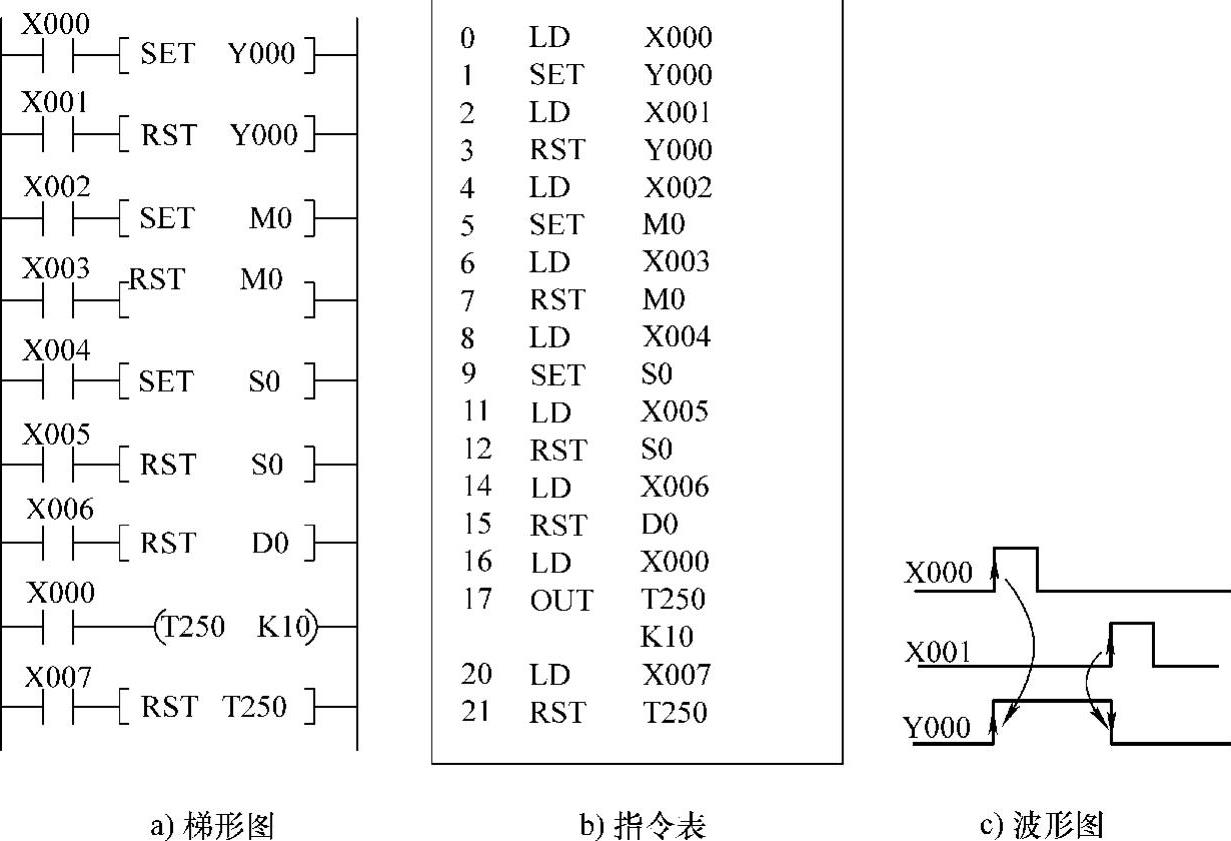
图5-29 SET、RST指令的使用说明
11.脉冲微分输出指令(PLS、PLF)
PLS为上升沿微分输出指令。当输入条件为ON(上升沿)时,相应的输出位元件Y或M接通一个扫描周期。
PLF为下降沿微分输出指令。当输入条件为OFF(下降沿)时,相应的输出位元件Y或M接通一个扫描周期。
这两条指令都是2个程序步,它们的操作元件是Y和M,但特殊辅助继电器不能作为操作元件。其使用说明如图5-30所示。
使用这两条指令时,要特别注意操作元件。例如,在驱动输入接通时,PLC由运行→停止→运行,此时PLSM0动作,但PLSM600(断电保持辅助继电器)不动作。这是因为M600在断电停机时其动作也能保持。
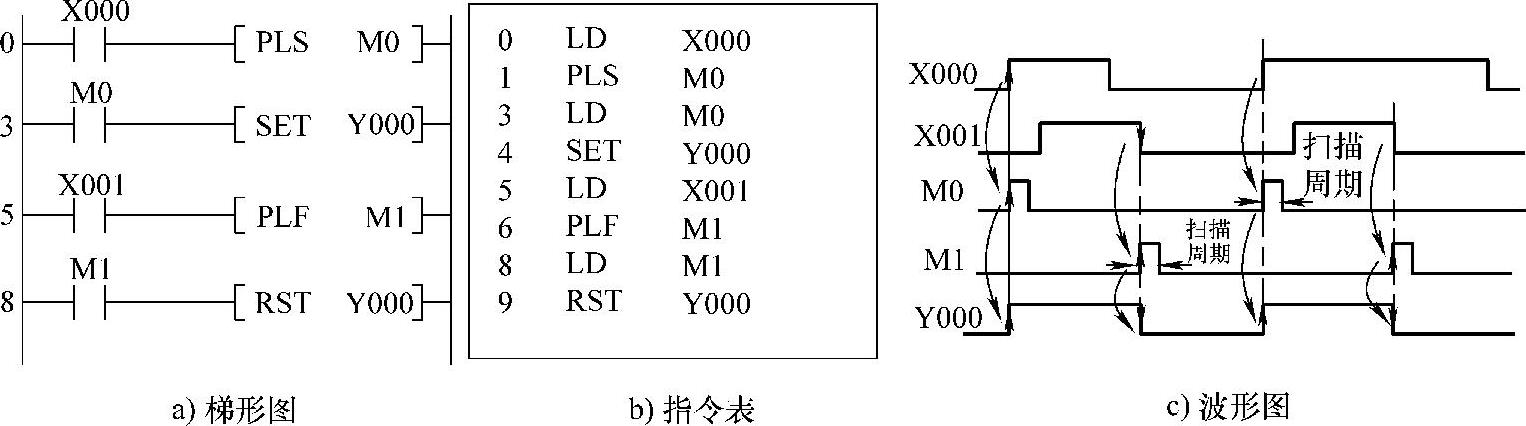
图5-30 PLS、PLF指令的使用说明
12.空操作指令(NOP)
空操作指令(NOP)是不带操作数的,在普通指令之间插入NOP指令,对程序执行结果没有影响,但是将已写入的指令换成NOP,则被换的程序被删除,程序发生变化。所以用NOP指令可以对程序进行编辑,如图5-31所示。在图5-31中,当把ANDX001换成NOP,则触点X001被消除,ANIX002换成NOP,触点X002被消除。
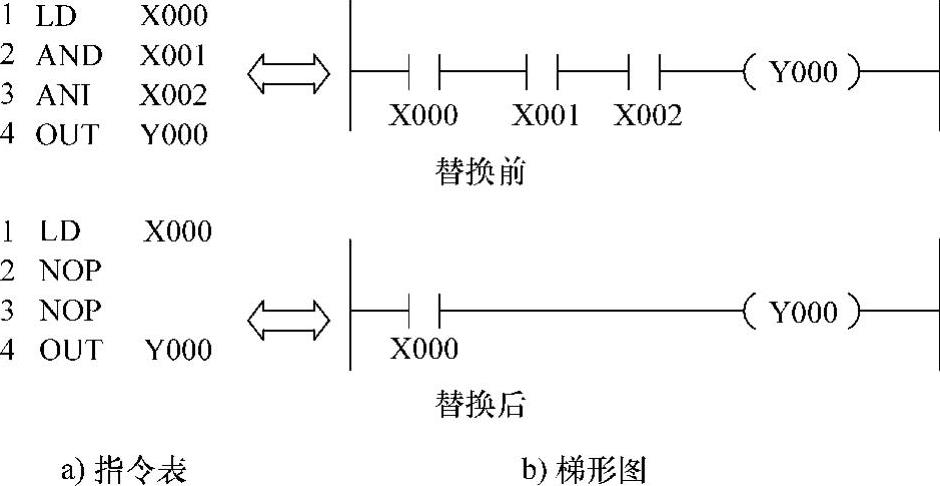
图5-31 NOP指令的使用说明
13.程序结束指令(END)
当一个程序结束时,后面用程序结束指令(END),写在END后的程序不能被执行,系统会由END处自动返回,开始下一个扫描周期。如果程序结束不用END,在程序执行时会扫描完整个用户存储器,延长程序的执行时间,有的PLC还会提示程序出错、程序不能运行。
另外,使用END指令也方便调试程序。当编写很长的程序时,如果调试时发现程序出错,为了发现程序出错位置,可以从前往后每隔一段程序插入一个END指令,再进行调试,系统执行到第—个END指令会返回,如果发现程序出错,表明出错位置应在第一个END指令之前,若第—段程序正常,可删除第一个END指令,再用同样的方法调试后面的程序。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。