



1.半桥式电流可逆斩波电路
半桥式电流可逆斩波电路(直流电动机负载)如图4-14a所示。两个开关器件VT1和VT2串联组成半桥电路的上下桥臂,两个二极管VD1和VD2与开关管反并联形成续流回路,R、L包含了电动机的电枢电阻和电感。下面就电动机的电动和制动两种状态进行分析。
(1)电动状态(见图4-14b)
当电动机工作在电动状态时,给VT1以PWM驱动信号,VT1处于开、关交替状态,VT2处于关断状态。在VT1导通时有电流自电源E→VT1→R→L→电动机,电感L储能。在VT1关断时,电感储能经电动机和VD2续流。在电动状态,VT2和VD1始终不导通,因此不考虑这两个器件。图4-14b所示电路与降压斩波电路(图4-5a)相同,工作原理和波形也与降压斩波电路(电动机负载时)相同,Ud=αE,调节占空比可以调节电动机转速。
(2)制动状态(见图4-14c)
当电动机工作在电动状态时,电动机电动势EM<E,当电动机由电动转向制动时,就必须使负载侧电压Ud>E,但是在制动时,随转速下降,EM只会减小,因此需要使用升压斩波提升电路负载侧电压,使负载侧电压Ud>E。半桥斩波电路中若给VT2以PWM驱动信号,在VT2导通时,电动机经电感L、VT2形成回路,电感L随电流上升而储能。在VT2关断时,电动机反电动势EM和电感电动势eL(左正、右负)串联相加,产生电流,经VD1将电能输入电源E(见图4-14c)。在制动时,VT1、VD2始终在截止状态,因此不考虑这两个器件,图4-14c与图4-7的升压斩波电路有相同结构,不同的是现在工作于发电状态的电动机是电源,而原来的电源E成了负载,电流自E的正极端流入,工作原理也与升压斩波电路相同,且 。调节VT2驱动脉冲的占空比α可以调节Ud,控制制动电流。
。调节VT2驱动脉冲的占空比α可以调节Ud,控制制动电流。
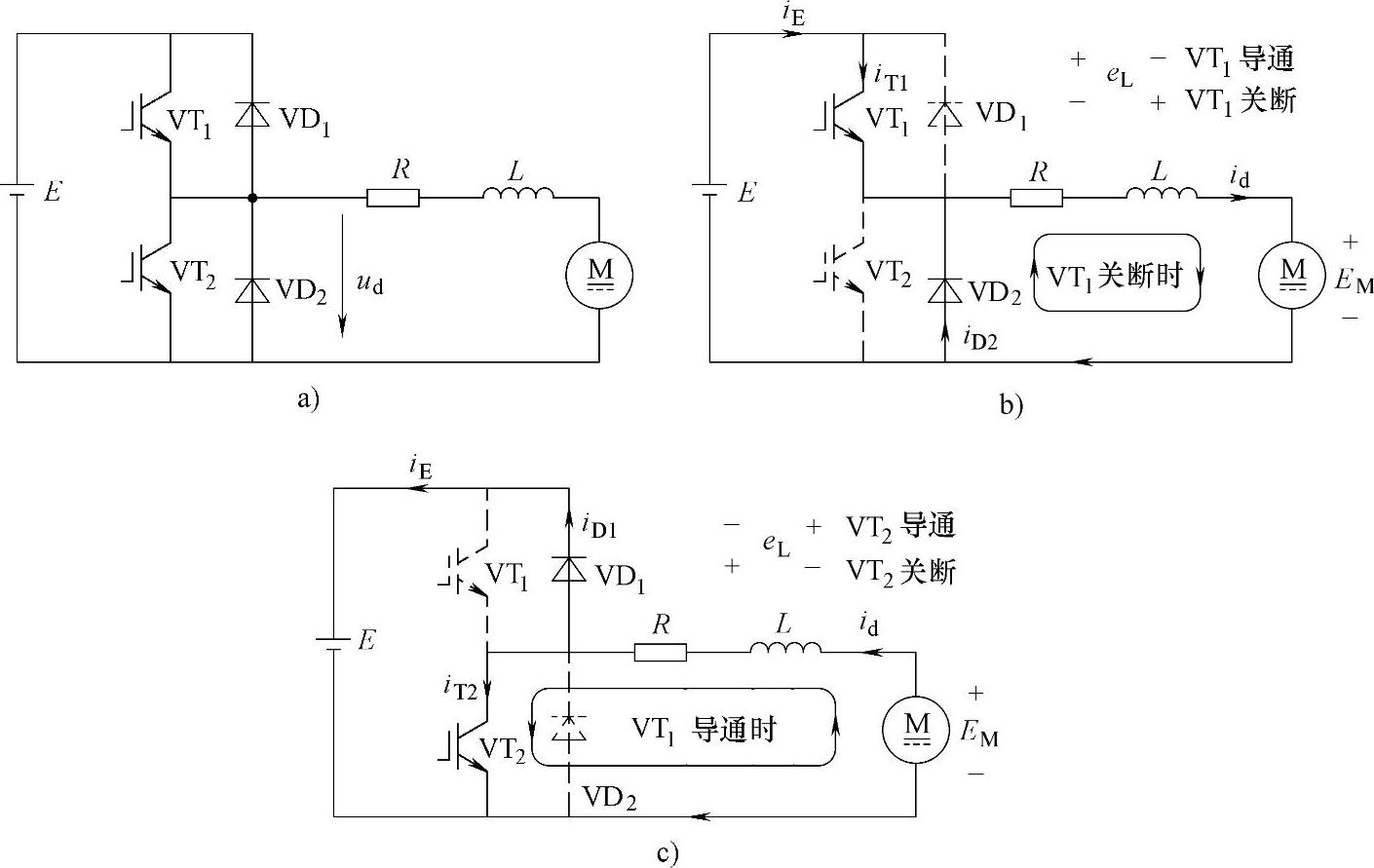
图4-14 半桥式电流可逆斩波电路
a)斩波电路 b)电动状态 c)制动状态
半桥式DC-DC电路所用元器件少,控制方便,但是电动机只能以单方向作电动和制动运行,改变转向要通过改变电动机励磁方向。如果要实现电动机的四象限运行,则需要采用全桥式DC-DC可逆斩波电路。
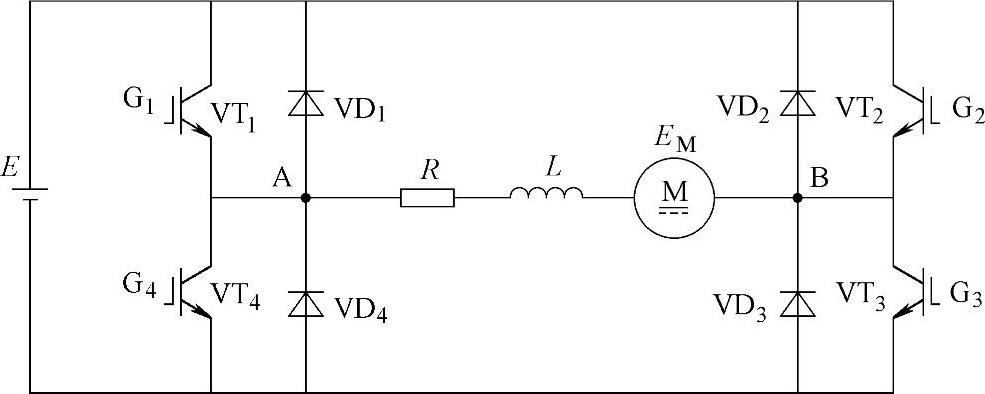
图4-15 全桥式可逆斩波电路
2.全桥式可逆斩波电路
半桥式斩波电路电动机只能单向运行和制动,若将两个半桥式斩波电路组合,一个提供负载的正向电流,一个提供负载的反向电流,电动机就可以实现正反向可逆运行。两个半桥式斩波电路就组成了全桥式斩波电路,全桥式斩波电路也称H形斩波电路,其电路如图4-15所示。在电路中,若VT1、VT3导通,则有电流自电路A点经电动机流向B点,电动机正转;在VT2、VT4导通时,则有电流自B点经电动机流向A点,电动机反转。桥式斩波电路有三种驱动控制方式,下面分别进行介绍。
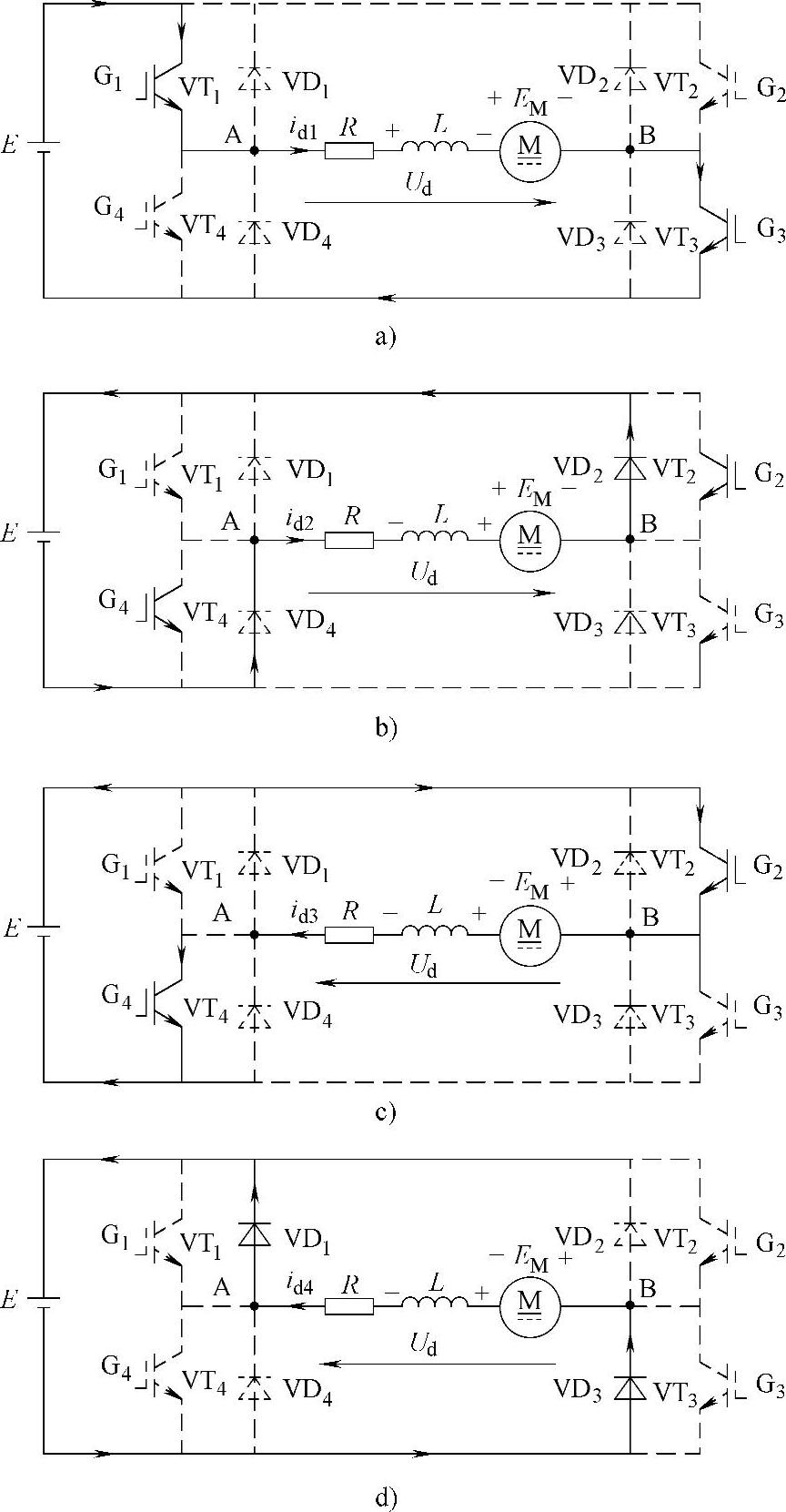
图4-16全桥式斩波电路工作模式
a)模式1 b)模式2 c)模式3 d)模式4
(1)双极式斩波控制
双极式可逆斩波的控制方式是,VT1、VT3和VT2、VT4成对作PWM控制,并且VT1、VT3和VT2、VT4的驱动脉冲工作在互补状态(见图4-15),即在VT1、VT3导通时,VT2、VT4关断;在VT2、VT4导通时,VT1、VT3关断,VT1、VT3和VT2、VT4交替导通和关断。双极式斩波控制有正转和反转两种工作状态、四种工作模式(见图4-16),对应的电压、电流波形如图4-17所示。
模式1:t1时VT1、VT3同时驱动导通,VT2和VT4关断,电流id1自电源E+→VT1→R→L→EM→VT3→E-,L上的电流上升,eL和EM极性如图4-16a所示。
模式2:在t2时VT1、VT3关断,VT2、VT4被触发,因为电感电流不能立即为0,这时电流id2的通路是E-→VD4→R→L→EM→VD2→E+,L上的电流下降。因为电感经VD1、VD4续流,短接了VT2和VT4,VT2和VT4虽已经被触发,但是并不能导通。eL和EM极性如图4-16b所示。
在模式1和模式2时,电流的方向是从A→B,电动机正转,设VT1、VT3导通时间为ton,关断时间为toff。在VT1导通时A点电压为+E,VT3导通时B点电压为-E,因此AB间电压

式中,占空比 。
。
在ton=T时,α=1;在ton=0时,α=-1,占空比的调节范围为-1≤α≤1。在0<α≤1时,Ud>0,电动机正转,电压、电流波形如图4-15a所示。(https://www.xing528.com)
模式3:如果-1≤α<0,Ud<0,即AB间电压反向,在VT2、VT4被驱动导通后,电流id3的流向是E+→VT2→EM→L→R→VT4→E-,L上的电流反向上升,eL和EM极性如图4-16c所示,电动机反转。
模式4(见图4-16d):在电动机反转状态,如果VT2、VT4关断,L上的电流要经VD1和VD3续流,id4的流向是E-→VD3→EM→L→R→VD2→E+,L上的电流反向下降。
模式3和模式4是电动机反转情况。如果α从1→-1逐步变化,则电动机电流id从正逐步变到负,在这个变化过程中电流始终是连续的,这是双极性斩波电路的特点。即使在α=0时,Ud=0,电动机也不是完全静止不动,而是在正反电流作用下微振,电路以四种模式交替工作(见图4-17c)。这种电动机的微振可以加快电动机的正反转响应速度。
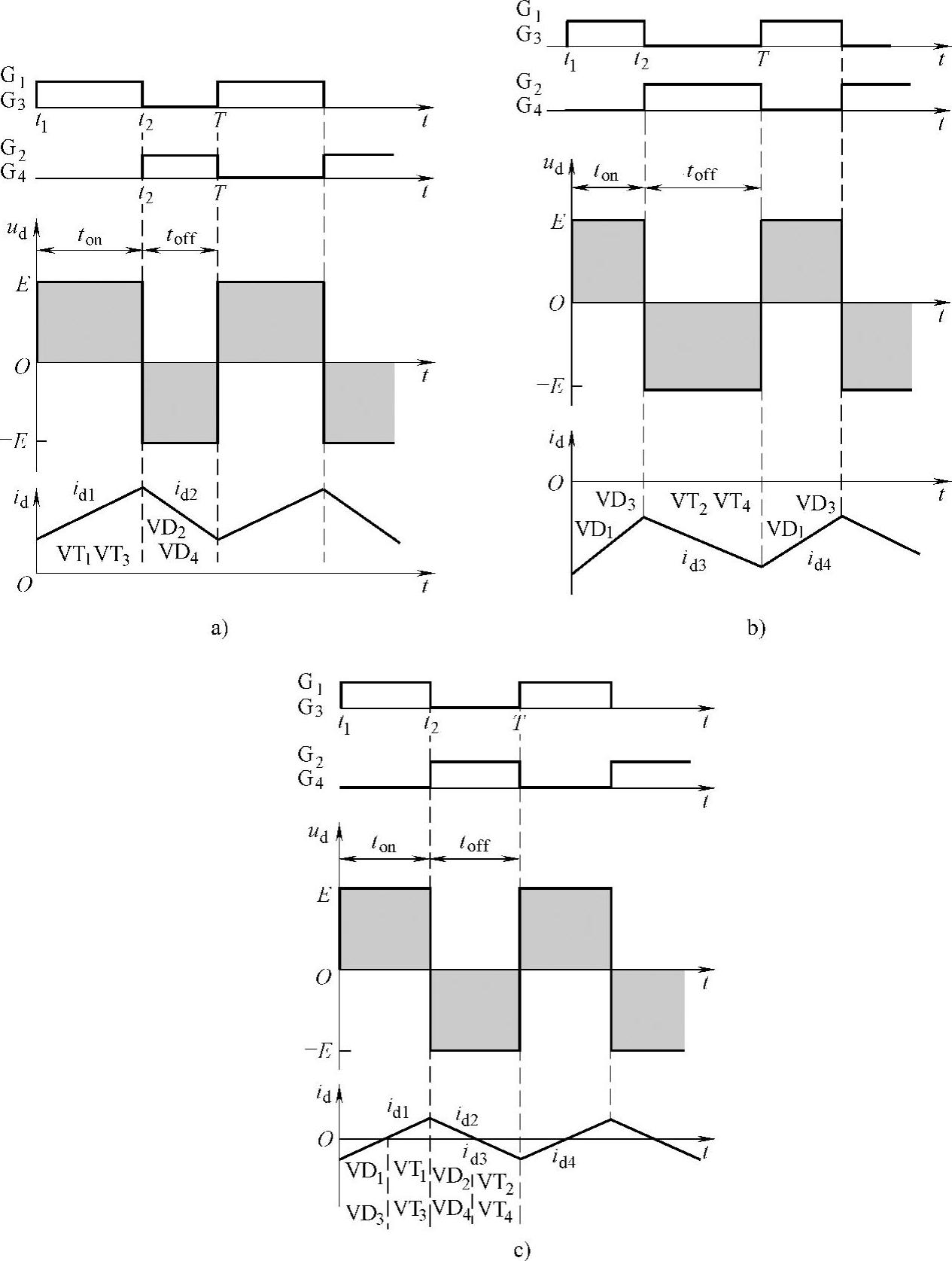
图4-17 电动机正反转控制波形
a)正向电流(电动机正转) b)反向电流(电动机反转) c)零电流(电动机停止)
双极式可逆斩波控制中,四个开关器件都工作在PWM方式,在开关频率高时,开关损耗较大,并且上下桥臂两个开关的通断如果有时差,则容易产生瞬间同时都导通的“直通”现象,一旦发生直通现象,电压E将被短路,这是很危险的。为了避免直通现象,上下桥臂两个开关导通之间要有一定的时间间隔,即留有一定的“死区”。
(2)单极式斩波控制
单极式可逆斩波控制是在图4-15中让VT1、VT4工作在互反的PWM状态,起调压作用,以VT2、VT3控制电动机的转向。在正转时VT3栅极给正信号,始终导通,VT2栅极给负信号,始终关断;反转时情况相反,VT2恒导通,VT3恒关断,这就减小了VT2、VT3的开关损耗和直通可能。单极式斩波控制在正转VT1导通时的状态与图4-16的模式1相同,在反转VT4导通时的工作状态和模式3相同。不同在于VT1或VT4关断时,电感L的续流回路模式2和模式4相同。
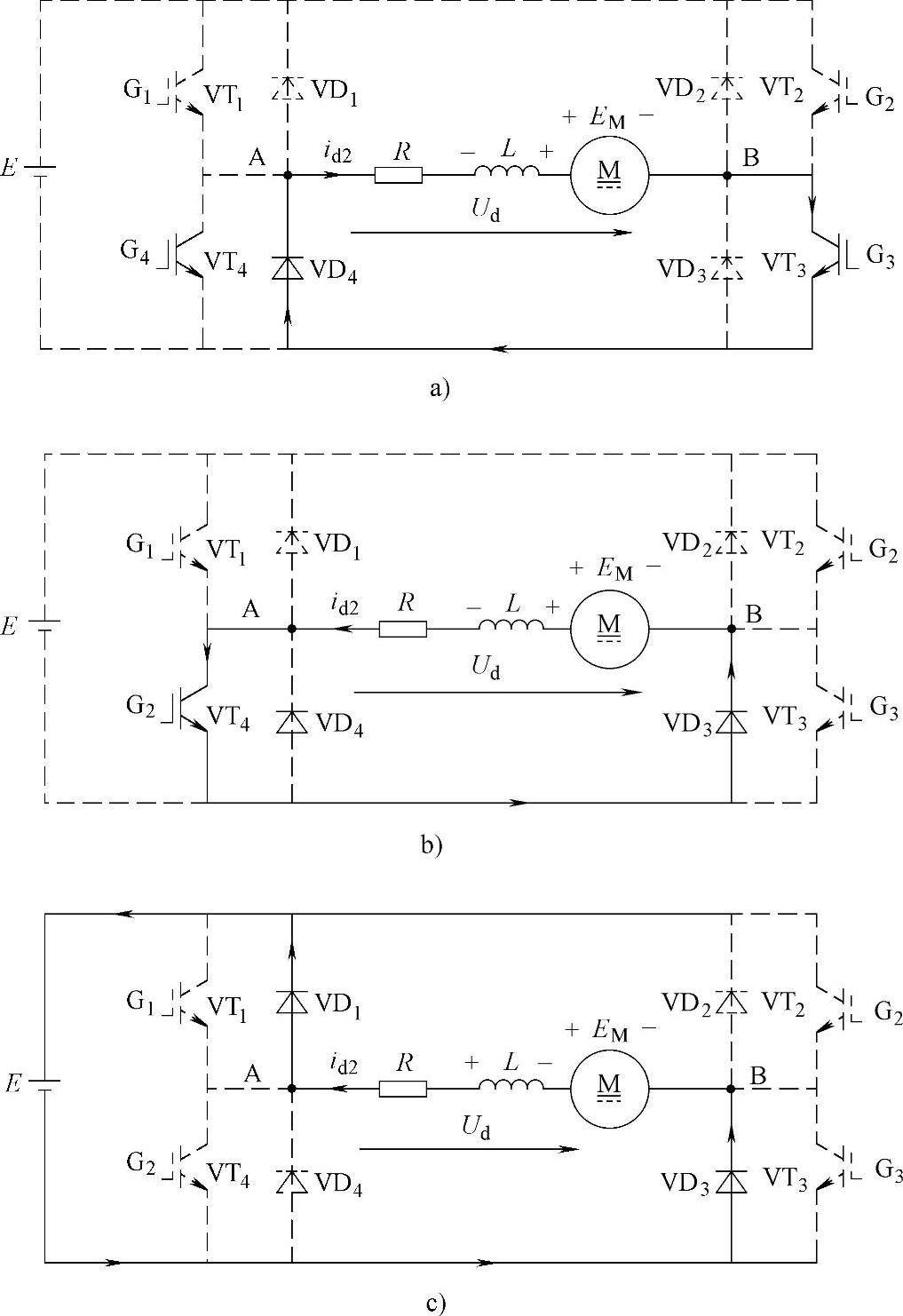
图4-18 单极式斩波控制模式2的变化(正转)
a)模式2-1 b)模式2-2 c)模式2-3
在正转VT1关断时,因为VT3恒通,电感L要经EM→VT3→VD4形成回路(见图4-18a),电感的能量消耗在电阻R上,ud=uAB=0。在VD4续流时,尽管VT4有驱动信号,但是被导通的VD4短接,VT4不会导通。电感续流结束后(负载较小情况),VD4截止,VT4就要导通,电动机反电动势EM将通过VT4和VD3形成回路(见图4-18b),电流反向,电动机处于能耗制动阶段,但仍有ud=uAB=0。在t=T时,VT4关断,电感L将经VD1→E→VD3放电(见图4-18c),电动机处于回馈制动状态,ud=uAB=E。不管何种情况,一周期中负载电压ud只有正半周(见图4-19b),故称为单极式斩波控制。图4-19b同时给出了负载较大和较小两种情况的电流波形。
电动机反转时的情况与正转相似,图4-16的模式4也有类似的变化,读者可自行分析。
因为单极式控制正转时VT3恒通,反转时VT2恒通,所以单极式可逆斩波控制的输出平均电压为

式中,占空比 ,且ton在正转时是VT1的导通时间,在反转时是VT4的导通时间;在正转时Ud为“+”,反转时Ud应为“-”。
,且ton在正转时是VT1的导通时间,在反转时是VT4的导通时间;在正转时Ud为“+”,反转时Ud应为“-”。
(3)受限单极式斩波控制
在单极式斩波控制中,正转时VT4真正导通的时间很少;反转时VT1真正导通的时间很少,因此可以在正转时使VT4、VT2恒关断;在反转时使VT1、VT3恒关断,对电路工作情况影响不大,这就是所谓的受限单极式斩波控制方式。受限单极式控制正转时VT1受PWM控制,VT3恒通;反转时VT4受PWM控制,VT2恒通。
受限单极式斩波控制在正转和反转电流连续时的工作状态与单极式控制相同,不同的是正转电流较小(轻载)时,没有了反电动势EM经过VT4的通路,因此id将断续,在断续区间ud=EM,因此平均电压Ud较电流连续时要抬高(见图4-20),即电动机轻载时转速提高,机械特性变软。受限单极式无论正转或反转,都只有一只开关管处于PWM方式(VT1或VT4),进一步减小了开关损耗和桥臂直通可能,运行更安全,因此受限单极式斩波控制使用较多。
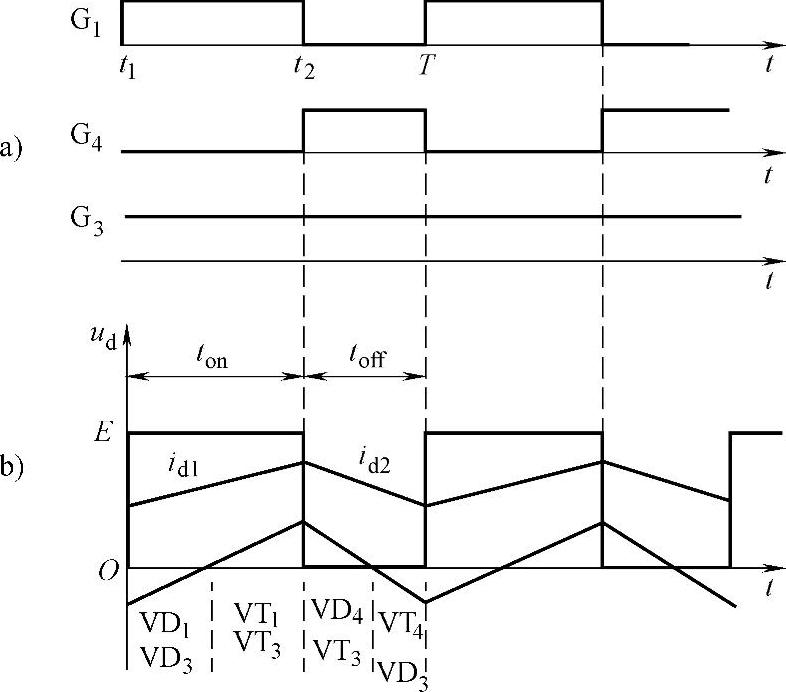
图4-19 单极式斩波控制波形(正转)
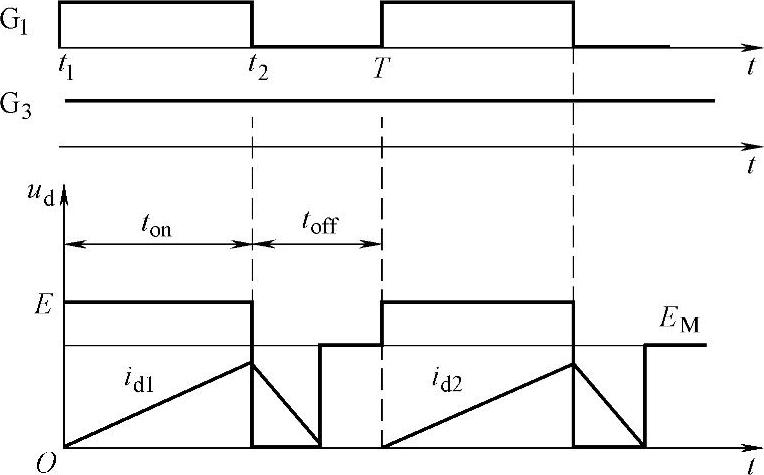
图4-20 受限单极式控制波形(正转)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。