



直流电动机负载除了具有电枢电阻、电感之外,还有一个电枢反电动势EM,这是区别于阻感负载的一个显著特点。
图3-45是三相半波相控整流电路向电动机供电的电路图。在这样的电路中,晶闸管加触发脉冲后能否导通,取决于电动机的反电动势EM和电感中的感应电动势eL的代数和是否小于变压器二次绕组的瞬时电压。在整流情况下,电动机反电动势EM的极性总是与整流电压的极性相反,容易判别。至于eL的极性,则视电流的变化情况而定。当电流增加时,eL的极性与整流电压极性相反,当电流减小时,eL的极性与整流电压极性相同。当电流不变时,电感电动势为零。
如果电动机的电枢电感较小可以忽略,认为L=0,则电压和电流波形如图3-46所示。当α<α1时,ua<EM,晶闸管承受反压不能触发导通。
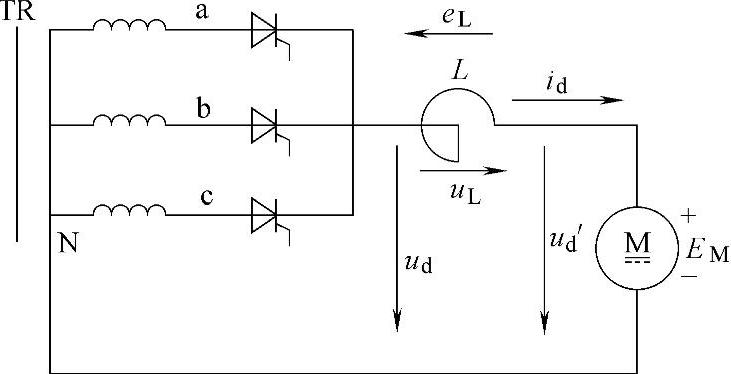
图3-45 串联电感的反电动势负载电路图
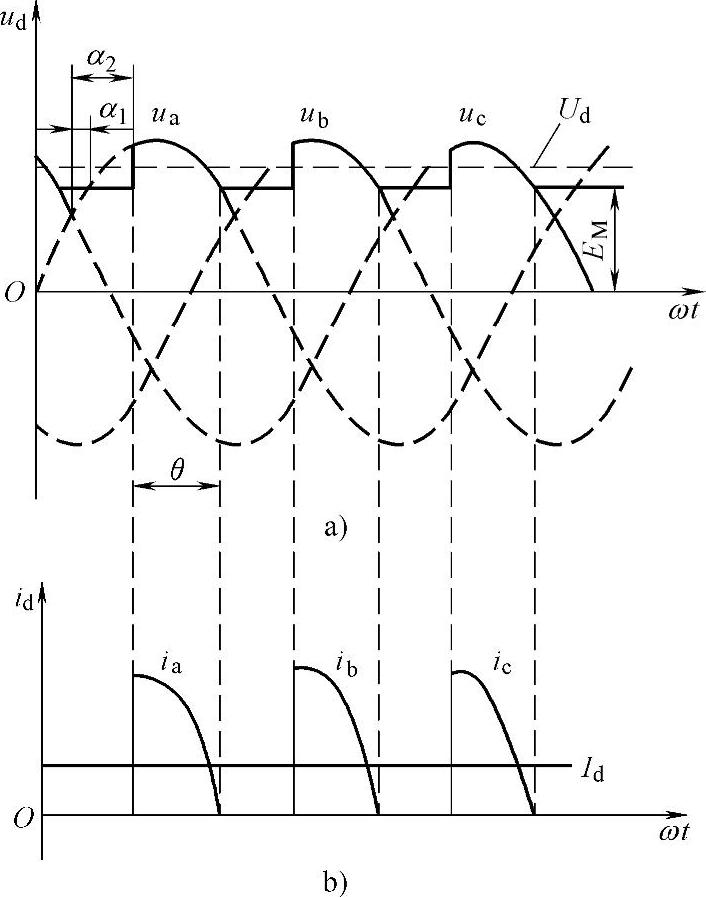
图3-46 L=0时的整流波形
当α≥α1(如α=α2)时,ua>EM,VT1受正压得到触发而导通。由于电路中没有电感(电枢电感已忽略),故晶闸管导通后负载电流按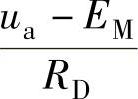 突然升高。因电动机有机械惯性,转速n来不及改变,即反电动势EM不变,故id随ua变化而变化。当ua过了最大值后重新与EM相等时,电流降到零,晶闸管关断,整流电压、电流波形如图3-46所示。从图中可以看出,晶闸管VT1仅在ua>EM的很小一段时间里导通。VT1导通时负载两端电压为ua;而在其余时间里,负载两端电压皆为EM。这样在相同触发延迟角下,整流电压平均值比电阻负载、电感负载时都高。特别是晶闸管导通角θ减小,会带来以下一系列问题:
突然升高。因电动机有机械惯性,转速n来不及改变,即反电动势EM不变,故id随ua变化而变化。当ua过了最大值后重新与EM相等时,电流降到零,晶闸管关断,整流电压、电流波形如图3-46所示。从图中可以看出,晶闸管VT1仅在ua>EM的很小一段时间里导通。VT1导通时负载两端电压为ua;而在其余时间里,负载两端电压皆为EM。这样在相同触发延迟角下,整流电压平均值比电阻负载、电感负载时都高。特别是晶闸管导通角θ减小,会带来以下一系列问题:
1)若输出和电阻负载同样大小的电流(平均值),通过晶闸管的电流峰值很高,因而其有效值比电阻负载时要大许多,使晶闸管利用率降低。
2)由于电流脉动大,会使电动机换向恶化,并且增加电动机损耗,温升增高。
3)由于电流峰值增高,即要求(u2-EM)差值大。所以当负载增大时,则EM必须下降很多,才能产生一定大小的Id,即电动机转速n也必须下降很多,这就是说当负载变化时,电动机的机械特性变得很软。
为了克服上述缺点,要在整流电路中串入滤波电抗器。有了电抗器的滤波作用,整流电路的工作情况就接近于电感负载了。
由于有了电感,当晶闸管供电给直流电动机时,每一瞬间电流的变化率决定于外加电压u2、电动机反电动势EM、回路中电阻压降和电感产生的感应电动势eL的数值。电压平衡方程为
 (https://www.xing528.com)
(https://www.xing528.com)
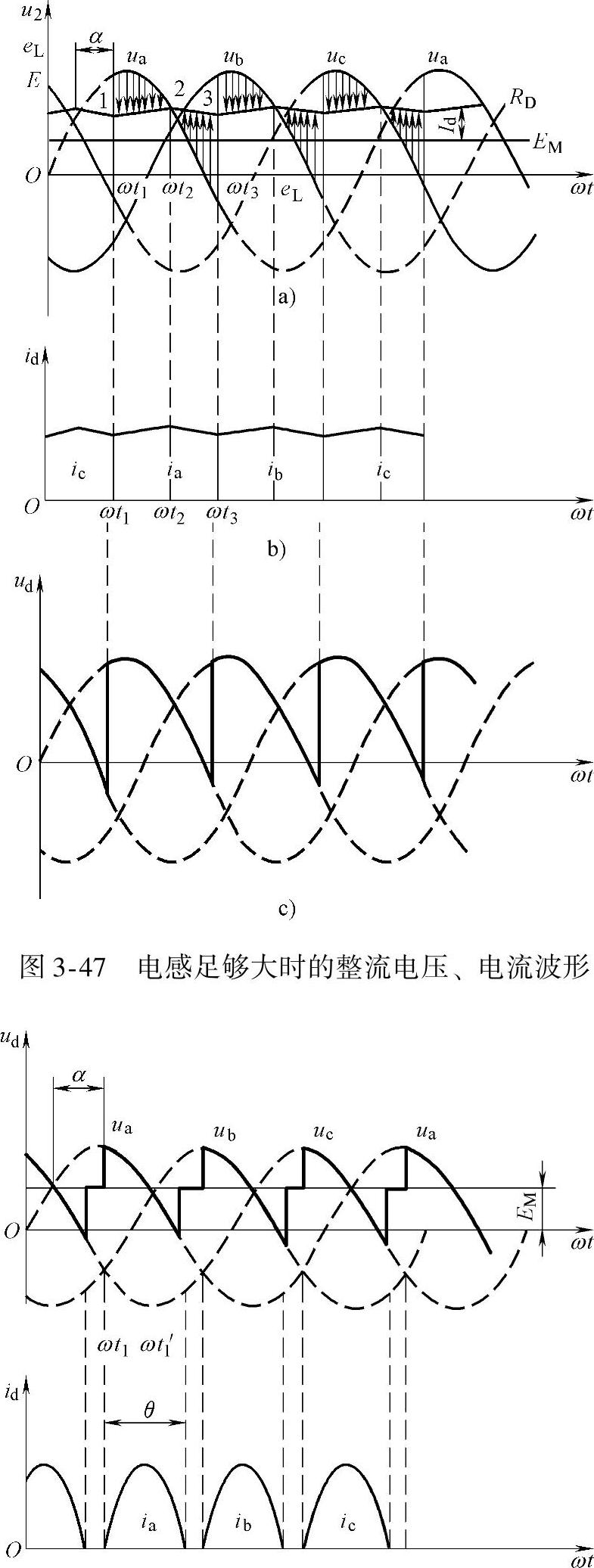
图3-48 电流断续时整流电压、电流波形
图3-47是这种情况下的整流电压、电流波形,图3-47a中曲线1-2-3与u2的距离代表电感中感应电动势的大小,此曲线与EM的距离表示idRD的大小。
在ωt1时触发VT1,因ua>EM,VT1导通且电流id增加,L中感应电动势阻碍电流增加,此时电压平衡方程式为
ua=EM+idRD+eL (3-116)
在ωt1~ωt2期间,随着u2与EM间差值的减少,id上升越来越慢,到2点时id增加到最大值did/dt=0,故eL=0,此时
ua=EM+idRD (3-117)
过了ωt2以后,在ωt2~ωt3期间,ua<EM+idRD,电流id减小,于是eL改变方向,此时
ua=EM+idRD-eL (3-118)
由于eL的数值较大,因此即使ua变为负值时,因eL-EM>ua,VT1仍受正向电压而继续导通。在ωt3时,触发VT2导通,VT1受反压关断。以后又重复上述过程。
由上面分析可知,当平波电感L足够大时,整流电流连续,整流电压ud波形与大电感负载时相同,完全决定于相电压ua(或ub、uc)及触发延迟角α,而与反电动势大小无关。这时整流电压所包含的交变分量大部分降落在电抗器上,电动机两端电压基本保持恒定不变,等于反电动势与电枢电阻压降之和。相应负载电流也与电感负载相同,是连续平滑的。
整流电路虽有电感,但当负载电流较小时,电感储能少,不足以维持电流连续,图3-48所示为这种情况下三相半波整流电路向电动机供电时的波形。在ωt1时,VT1触发导通,整流电压ud=ua,由于电感L的作用,在ua<EM后,VT1继续导通,直到ωt′1时,由于eL<EM+ua,故VT1受反向电压而关断,电流id=0,eL=0,这时整流输出电压又变为EM。
由上面分析可知,相控整流电路给直流电动机电枢供电时,电路中虽串有电抗器,但当电流较小时(转速接近空载转速时),电流仍会出现断续现象,这就使电动机在小负载时电压显著升高,而当负载变大时,电流重新连续,电压又下降很多,故电压调整率差,电动机的机械特性因电流断续而变差。这是晶闸管电动机系统存在的特殊问题,这个问题会对晶闸管电动机系统的机械特性产生影响,将在后续课程中讲述。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。