



交流电动机的控制性能主要取决于转矩或者电流的控制质量(在磁通恒定的条件下),为了满足电动机控制的良好动态响应,经常采用电流正弦PWM控制技术。
目前实现电流正弦PWM控制的常用方法是A.B.Plunkett提出的电流滞环SPWM,即把正弦电流参考波形和电流的实际波形通过滞环比较器进行比较,其结果决定逆变器桥臂上下开关器件的导通和关断。这种方法的优点是控制简单、响应快、瞬时电流可以被限制,功率开关器件得到自动保护,其缺点是相对的电流谐波较大。
1.电流滞环跟踪PWM(Current Hysteresis Band PWM,CHBPWM)控制技术
电流滞环控制是一种非线性控制方法,电流滞环控制型逆变器一相(U相)电流控制框图如图2-34a所示。正弦电流信号发生器的输出信号作为电流给定信号,与实际的相电流信号相比较后送入电流滞环控制器。设滞环控制器的环宽为2ε,t0时刻,i*U-iU≥ε,则滞环控制器输出正电平信号,驱动上桥臂功率开关器件VT1导通,使iU增大。当iU增大到与i*U相等时,虽然ΔiU=0,但滞环控制器仍保持正电平输出,VT1保持导通,iU继续增大,直到t1时刻,iU=i*U+ε,滞环控制器翻转,输出负电平信号,关断VT1,并经保护延时后驱动下桥臂功率开关器件VT2。但此时VT2未必导通,因为电流iU并未反向,而是通过续流二极管VD2维持原方向流通,其数值逐渐减小。直到t2时刻,iU降到滞环偏差的下限值,又重新使VT1导通,VT1与VD2的交替工作使逆变器输出电流与给定值的偏差保持在±ε范围之内,在给定电流上下作锯齿状变化。当给定电流是正弦波时,输出电流也十分接近正弦波,如图2-34b所示。与此类似,负半周波形是VT2与VD1交替工作形成的。
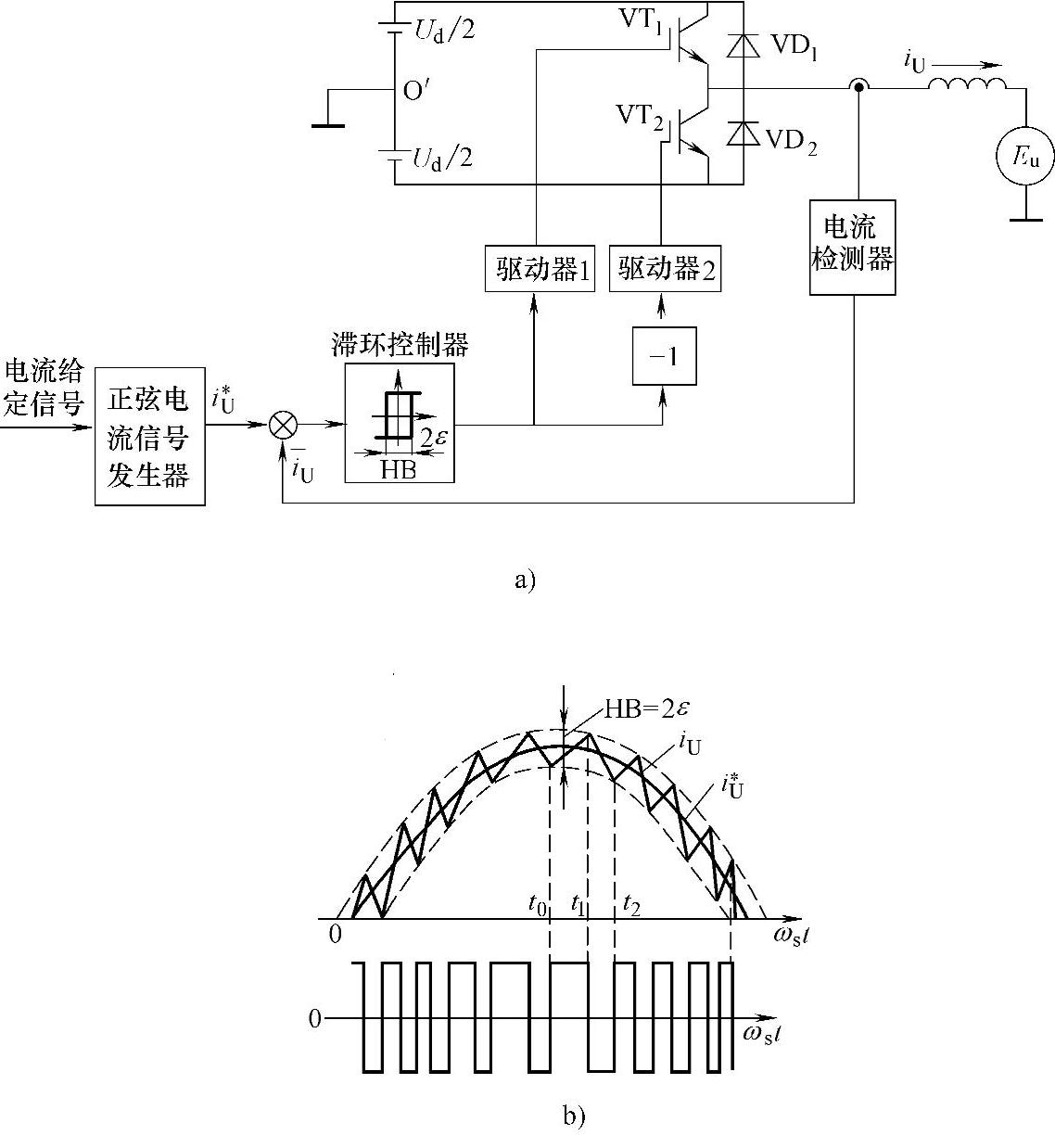
图2-34 电流滞环控制型逆变器一相电流控制框图及波形图
a)滞环电流跟踪型PWM逆变器一相结构示意图 b)滞环电流跟踪型PWM逆变器输出电压、电流波形图
显然,滞环控制器的滞环宽度越窄,则开关频率越高,可使定子电流波形更逼近给定基准电流波形,从而将有效地使电动机定子绕组获得电流源供电效果。了解一相电流滞环控制型SPWM逆变器原理之后便可以组成三相电流滞环控制型SPWM变频调速系统,如图2-35所示。
需要指出的是,电流滞环控制型对于给定的滞环宽度,其开关频率随着电动机运行状态的变化而变化。当开关频率超过功率器件的允许开关频率时,将不利于功率器件的安全工作;当开关频率过低时将会造成电流波形畸变,导致电流谐波成分加大。因此,最好能使逆变器的开关频率在一个周期内保持一定。(https://www.xing528.com)
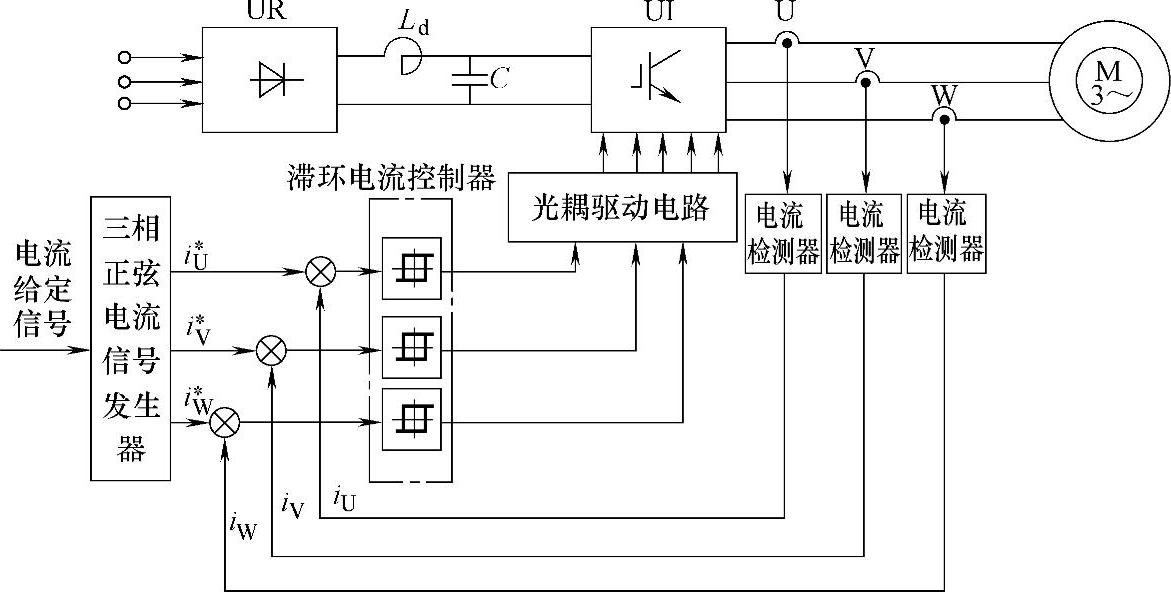
图2-35 异步电动机电流滞环控制变频调速系统
2.固定开关频率型
为了克服电流滞环控制型的开关频率变化的缺点,采取的措施之一就是采用固定开关频率型的电流跟踪控制方式,其一相(U相)电路的控制原理框图如图2-36所示。
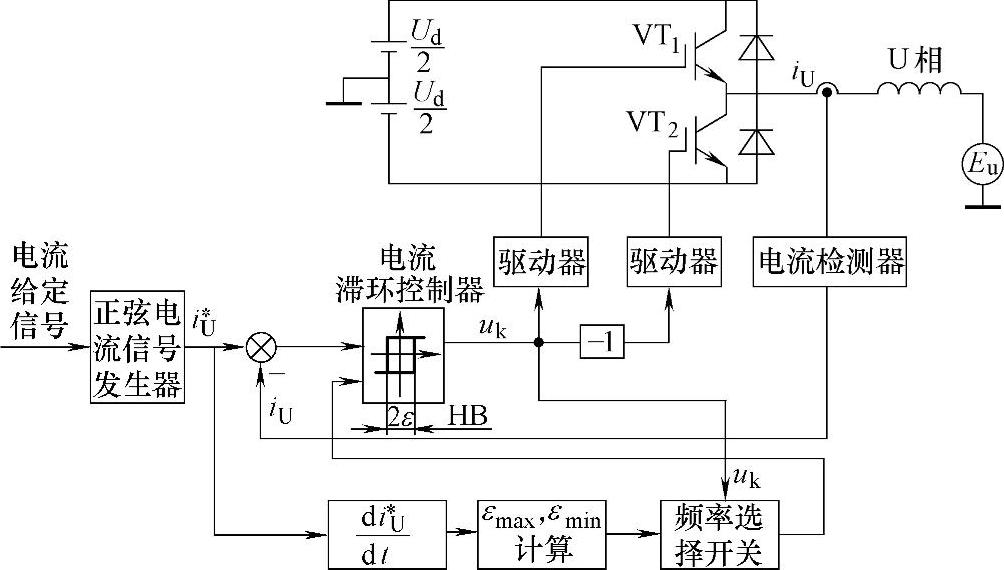
图2-36 一种固定开关频率型的电流滞环控制一相(U相)系统
考虑到参考电流i*U的变化率di*U/dt直接决定了开关频率ft,从而可按照di*U/dt来调整滞环宽度HB。i*U经过微分运算环节求出di*U/dt,然后通过环宽计算环节确定εmax和εmin,再根据电流滞环控制器输出uk的电平自动选择εmax和εmin,并送入电流滞环控制器,以实现环宽随i*U的变化率而改变,使得逆变器输出的PWM脉冲频率在一个周期内基本不变。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。