



(1)指令功能与格式 PID指令的格式见图7-178。不可32位操作及边沿执行。
①偏差计算。自动计算给定值与反馈值的偏差,实现闭环控制。
②PID运算。对偏差作P、I、D运算,实现PID调节并输出。
③报警输出。对测量反馈输入与PID输出变化率监控,输出相应报警。
④输出限制。上/下极限设定,将PID输出限制在规定范围。
⑤自动调谐。自动设定PID调节参数。

图7-176 模块控制参数的赋值程序
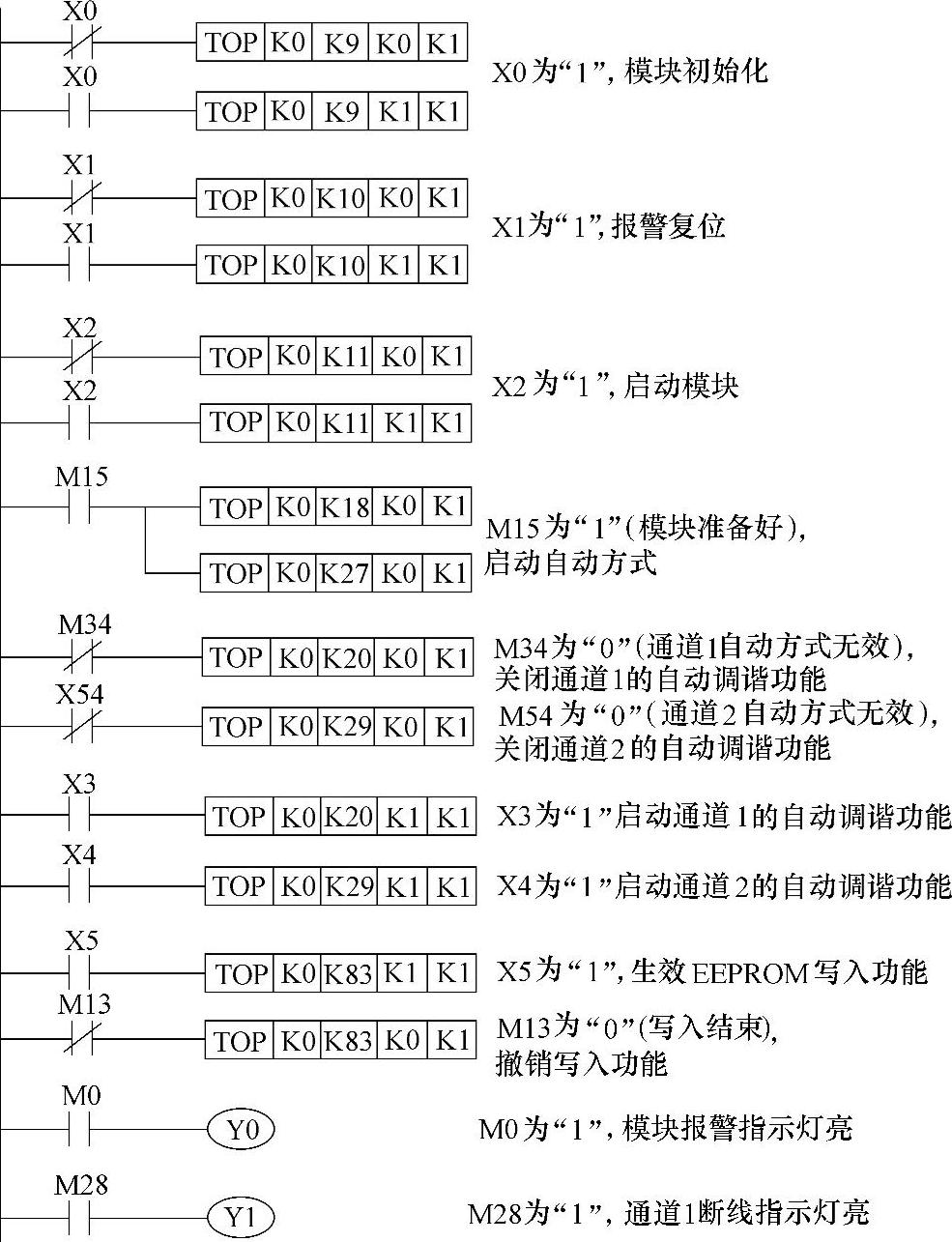
图7-177 模块I/O控制程序

图7-178 PID指令的格式
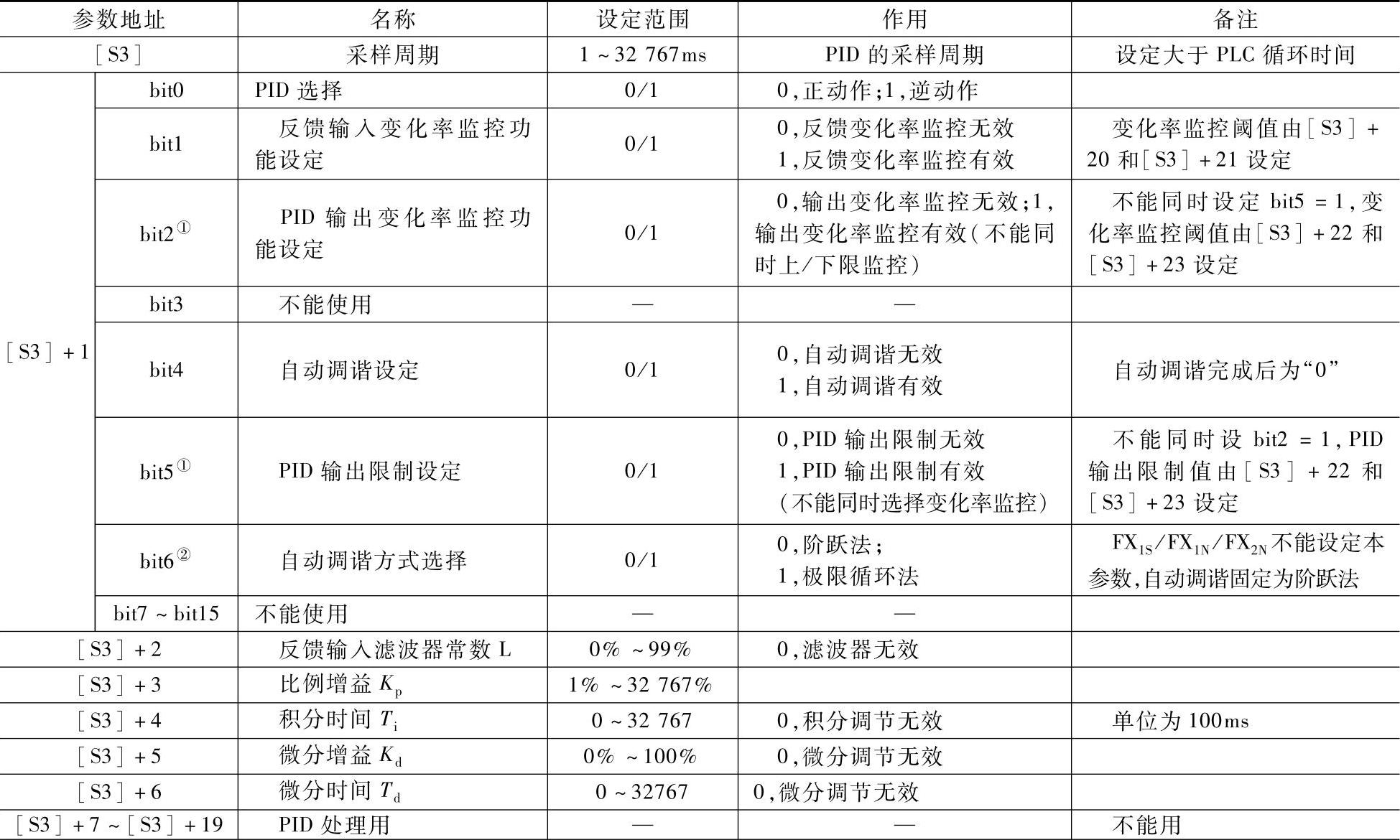
[S1.]:D,给定输入存储器地址;[S2.]:D,反馈输入存储器地址;[S3.]:D,PID调节与控制参数,连续29字。FX1S/1N/2N系列PLC为25字;[D.]:D,PID运算结果输出存储器地址;[S3.]:PID控制参数设定,长度为25~29字,需要先进行程序设定,见表7-94。PID输出变化率监控与输出限制值设定参数相同,两种功能不能同时选择。
表7-94 PID控制参数的设定
(续)
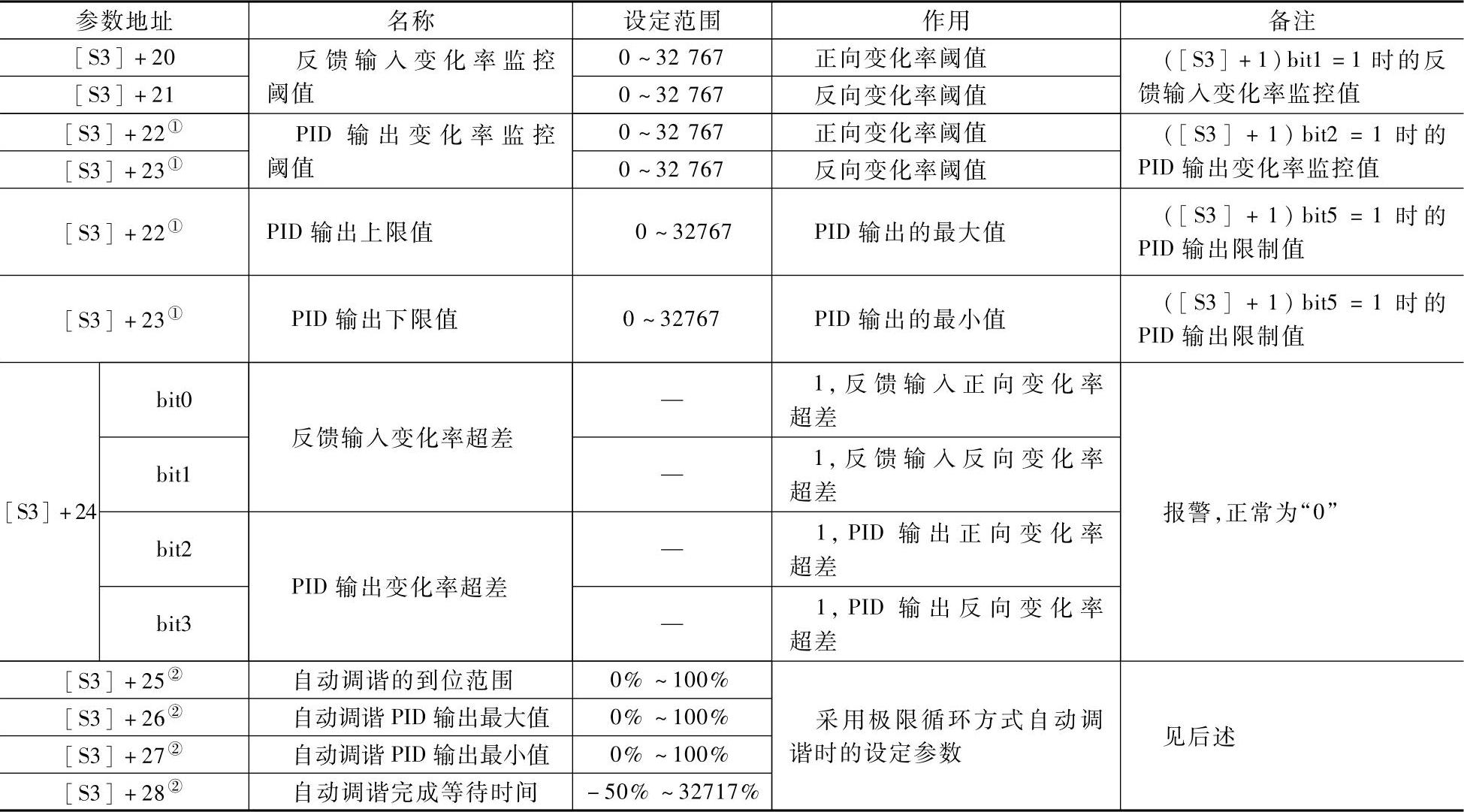
①PID输出变化率监控与PID输出限制值设定参数相同,2种功能不能同时选择。
②参数在FX1S/FX1N/FX2N系列PLC不能使用。
(2)PID调节方式 闭环系统调节,P有快速性,D有预先性,I消除稳态误差。FX系列PID通过([S3]+1)bit0设定正向与逆向调节。PID输出随反馈增加而增加是“正动作”,PID输出随反馈增加而减少是“逆动作”,见图7-179。
(3)PID调节运算 PID调节运算包括比例增益Kp、积分时间Ti、微分时间Td、微分增益Kd。其中,增加Kp可缩短调节时间但引起超调,见图7-180。为消除闭环系统稳态误差,用PI调节及增加I后,系统误差通过积分调节累计,在偏差输入为“0”时系统输出仍保持。PI调节过程中积分时间越短,系统响应快会引起系统超调,见图7-181。用PI闭环系统在消除稳态误差时也延缓了系统响应速度,当受外部扰动时恢复速度慢,需PID调节增加系统快速性。Kd、Td的值越大,系统响应速度越快,见图7-182。
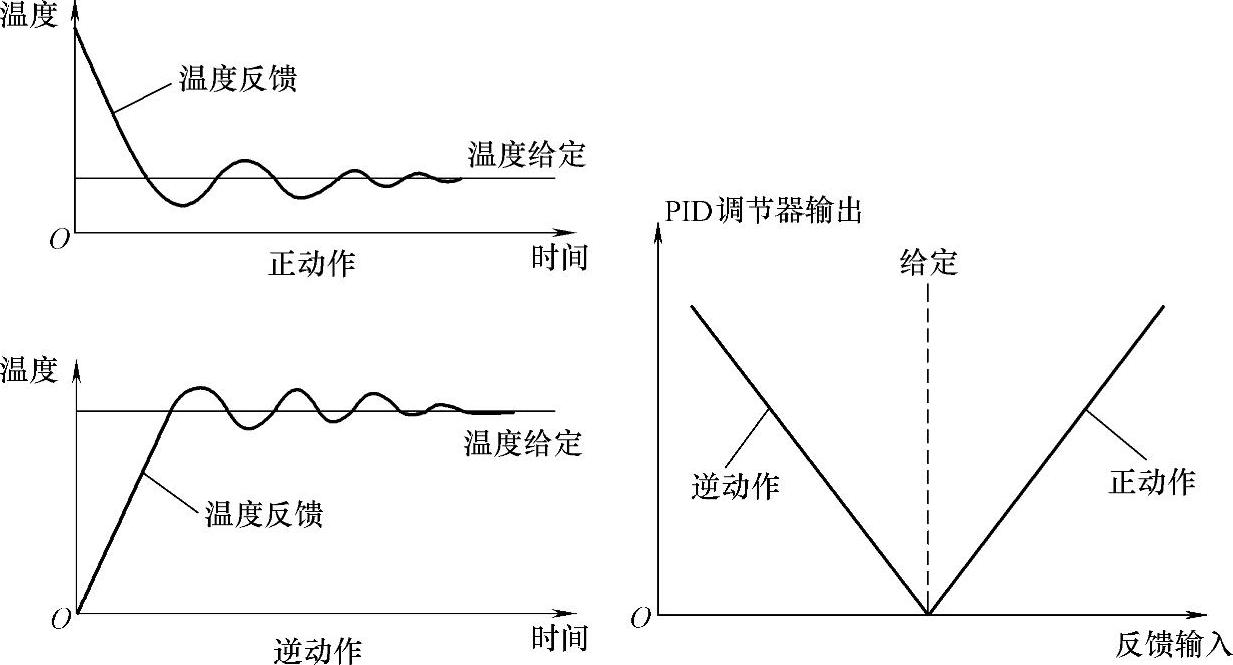
图7-179 PID调节的正动作与逆动作
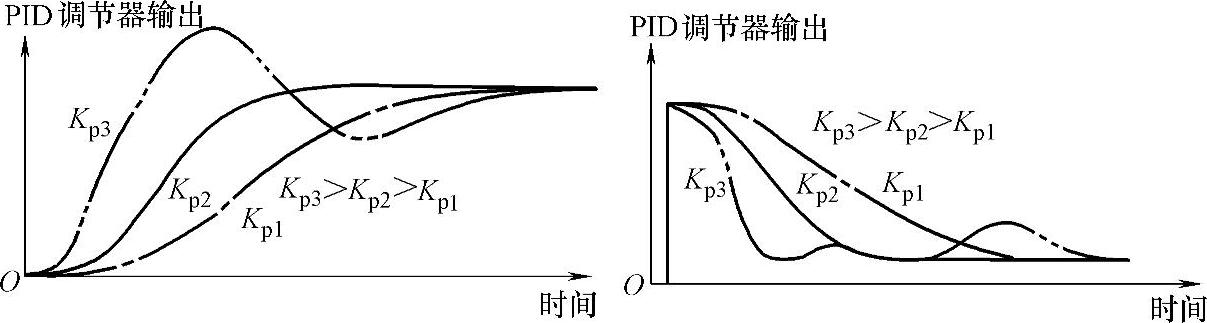
图7-180 比例增益作用
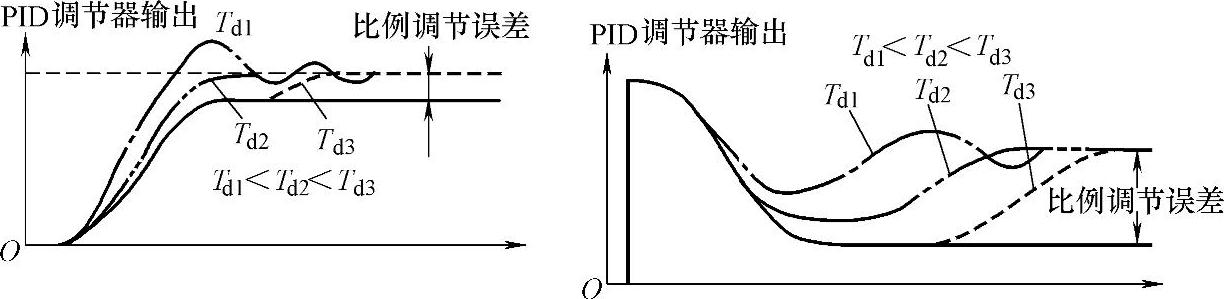
图7-181 积分时间作用
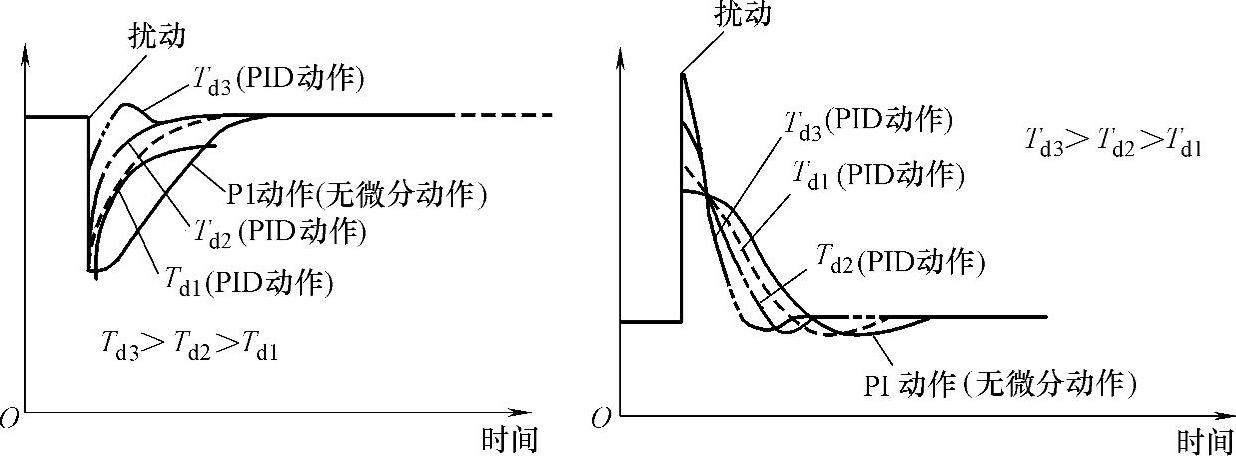
图7-182 微分调节作用(https://www.xing528.com)
(4)附加功能说明
1)变化率监控功能。由([S3]+1)bitl/bit2设定,PID选择“反馈输入变化率监控”与“PID调节器输出变化率监控”。PID输出变化率监控不能与PID输出限制同时选用。变化率指相邻2个采样周期数值变化量,正反向变化率监控阈值可分别设定,变化率超监控阈值报警,见图7-183。
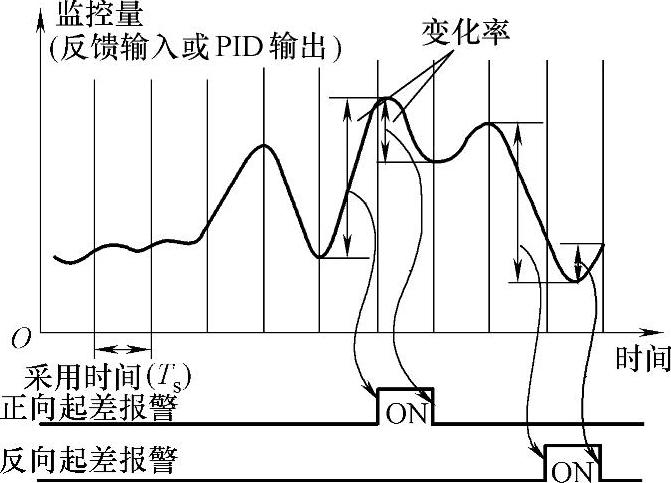
图7-183 变化率监控功能
2)输出限制功能。将超限值PID输出限制在上限或下限范围内,见图7-184。由([S3]+1)bit5设定,输出上/下限值由[S3]+22、[S3]+23设定,输出上/下限与输出变化率监控阈值设定相同,([S3]+1)bit5与([S3]+1)bit2设定区分,同一PID不能同时设定2种功能。
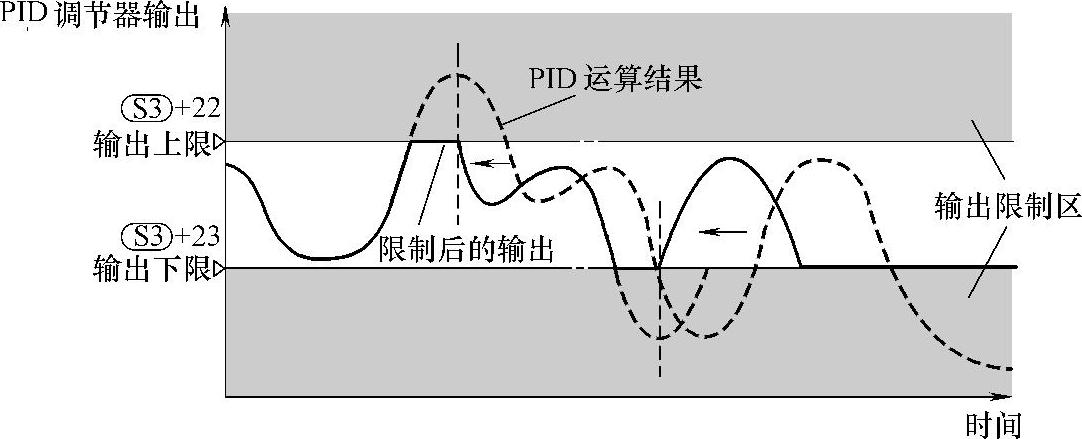
图7-184 输出限制功能
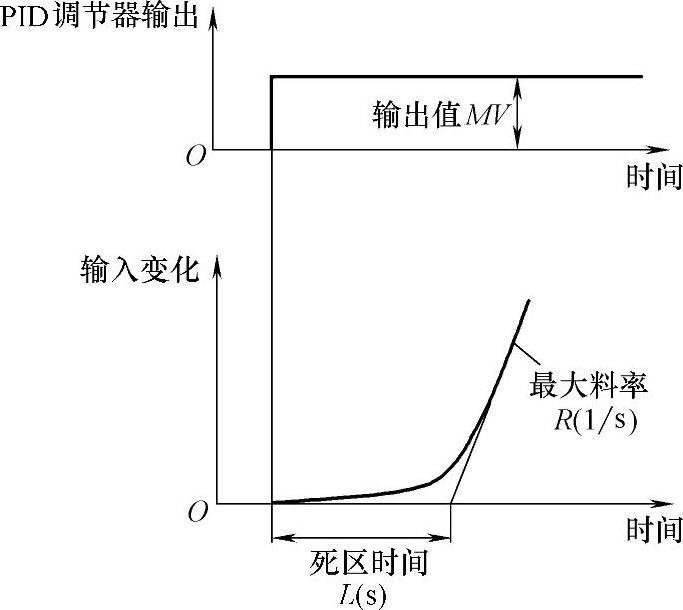
图7-185 阶跃法自动调谐
(5)自动调谐 自动设定PID调节参数。在PID输出强制施加输出值,再通过检测输入变化自动计算并设置PID参数。通过设定([S3]+1)bit6,用“阶跃法”与“极限循环法”完成系统自动调谐过程,自动设定Kp、Ti、Td。
①阶跃法自动调谐。在PID调节输出强制加突变量,测量调节器输入变化死区时间L与最大斜率R确定PID参数,见图7-185。
②极限循环法自动调谐。PID输出强制加入最大值与最小值循环变化突变量,测量输入变化振幅a与周期τ确定PID调节参数,见图7-186,自动调谐参数MV1、MV2与到位范围由[S3]+26、[S3]+27、[S3]+25给定。([S3]+1)bit4设定启动,调谐完成后([S3]+1)bit4恢复“0”。
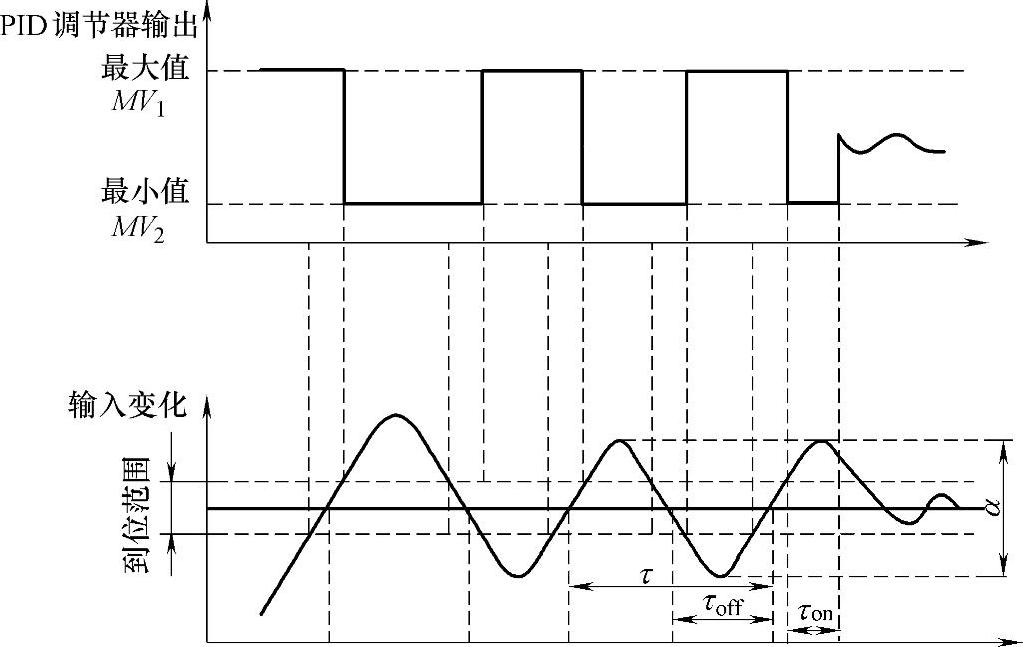
图7-186 极限循环法自动调谐
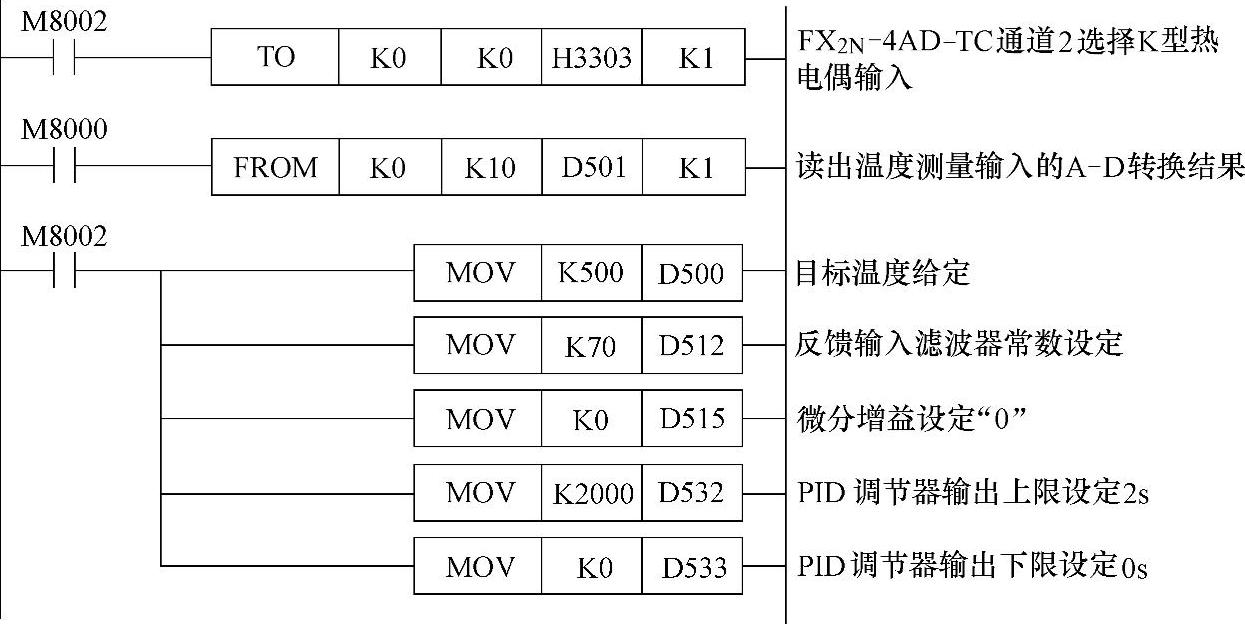
图7-187 初始程序设定
(6)项目示例 某加热系统,测温输入FX2N—4AD—TC的CH2,K型热电偶,反馈输入滤波常数70%;目标温度为50℃,加热器输出为周期2s的PWM型,输出“ON”加热,PID输出限制功能有效。X10自动调谐启动;X11为PID调节启动;Y0为PID出错报警;Y1为加热器控制;D500目标温度,精度为0.1℃;D501温度反馈,精度为0.1℃;D502为PID输出;PID控制参数设定D510~D538。PID参数自动调谐设定;自动调谐采样时间为3s;阶跃调谐时的PID输出突变量为最大输出的90%,PID采样时间为0.5s。
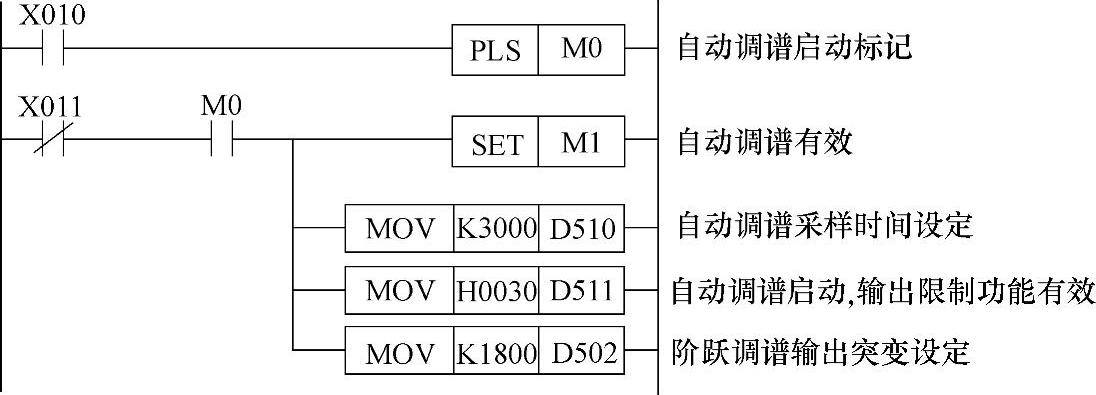
图7-188 自动调谐参数设定
1)初始程序设定,见图7-187。自动调谐与PID控制公共程序。目标温度精度0.1℃,微分增益“0”为微分无效。PID调节输出为加热器“ON”,输出Yl的PWM信号周期2s,加热器ON上限2s、下限0s。
2)自动调谐参数设定,见图7-188。X10=1时有效。参数设定到起始地址D510的PID数据存储器。
3)PID调节,见图7-189。自动调谐与正常PID调节共用PID指令,正常PID调节时需修改采样时间。PLC开机或控制时清除PID输出。
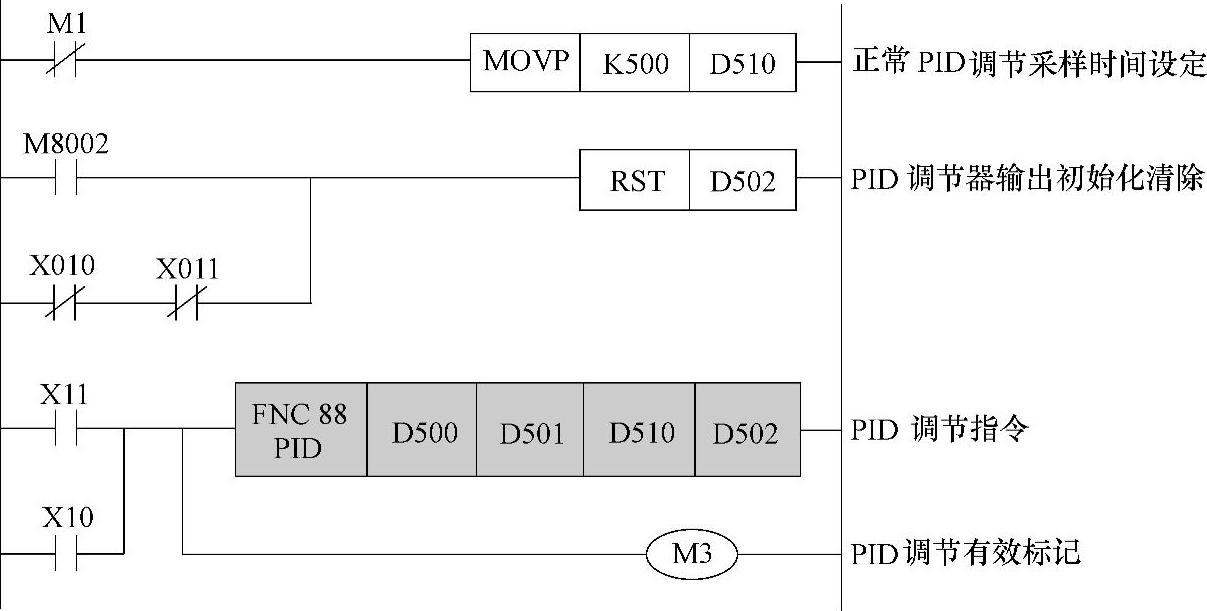
图7-189 PID调节
4)输出控制,见图7-190。自动调谐执行完成状态检查PID参数(D511bit4)确认,自动调谐完成D511的bit4=0,清除标记M1。PWM信号周期2s。加热器输出T246当前时间与PID调节器输出D502比较,如T246的时间大于PID调节输出D502,加热器ON;反之OFF。在Y1为ON时间受D502控制的PWM输出。PID调节出错M8067=1,驱动系统报警Y0。
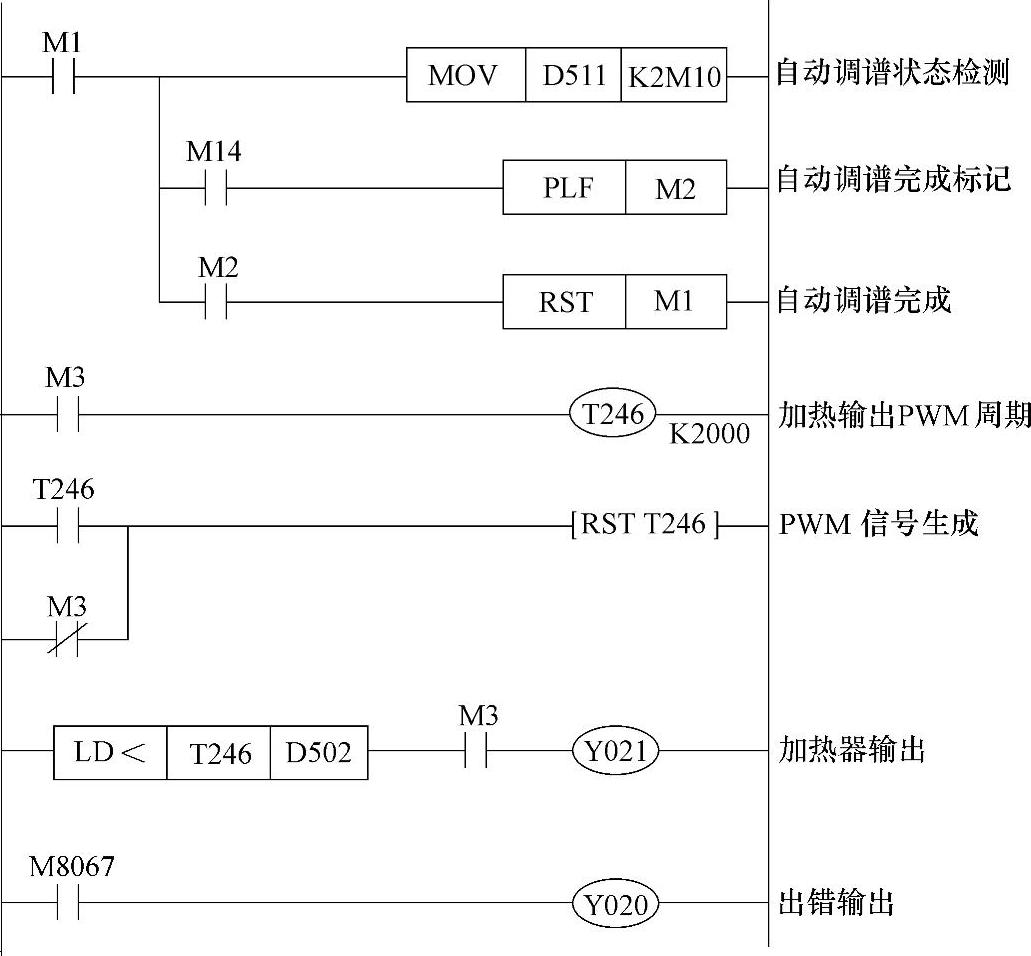
图7-190 输出控制
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。