



【摘要】:转向车轮纯滚动、无侧滑的转向要求是则式中,α、β为内、外侧转向车轮的理论转角,即内、外侧转向梯形臂的理论转角;为转向特性参数;M为两转向主销的轴线延长线与地面交点间的距离;L为汽车的轴距。假定转向梯形在过M′的水平平面内运动,不计前轮定位角的影响,不考虑弹性轮胎的侧偏,现以后置转向梯形为例推导β′的函数关系式。
转向车轮(一般是前轮)纯滚动、无侧滑的转向要求是
则
式中,α、β为内、外侧转向车轮的理论转角,即内、外侧转向梯形臂的理论转角; 为转向特性参数;M为两转向主销的轴线延长线与地面交点间的距离;L为汽车的轴距。
为转向特性参数;M为两转向主销的轴线延长线与地面交点间的距离;L为汽车的轴距。
当内侧转向车轮的实际转角为α时,通过转向梯形所能获得的外侧转向车轮(或转向梯形臂)的实际转角为β′,如图4-2所示。假定转向梯形在过M′的水平平面内运动,不计前轮定位角的影响,不考虑弹性轮胎的侧偏,现以后置转向梯形为例推导β′的函数关系式。
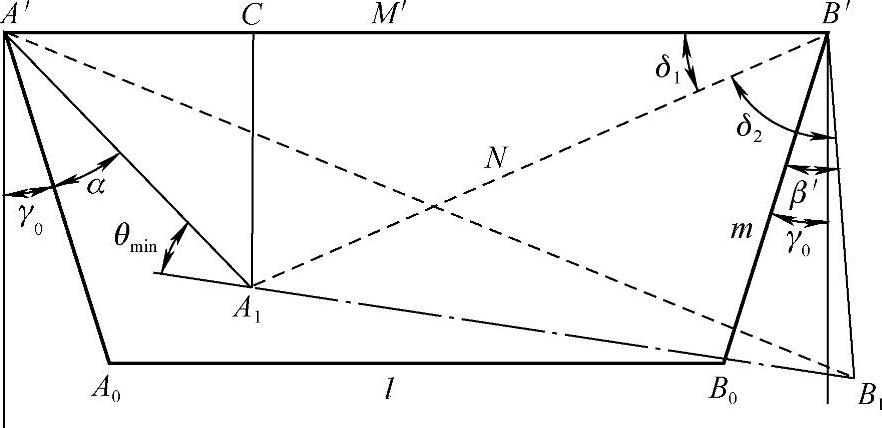
图4-2 转向梯形
图4-2中的梯形A′B′A0B0为汽车直线行驶时的位置,而A′B′A1B1则是内侧转向梯形臂转过α角时的位置。γ0为转向梯形的布置角,即直线行驶时,转向梯形臂与车辆纵向平面间的夹角,称为γ0的余角(90°-γ0),为梯形底角;m为转向梯形臂过M′水平面的投影长度;M′为连接转向梯形臂处主销轴线间的距离;l为横拉杆长度。则

l=M′-2msinγ0 (4-3)(https://www.xing528.com)

由余弦定理得
N2=M′2+m2-2M′mcos[90°-(γ0+α)]=M′2+m2-2M′msin(γ0+α) (4-5)
又 l2=N2+m2-2Nsin(δ1+γ0-β′)
则
将式(4-2)~式(4-5)代入式(4-6)得

式(4-7)同样适合于前置转向梯形,只是γ0、α角均要换成负值计算,得出的β′角也为负值。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。