



【摘要】:进退法确定搜索区间的步骤如下:1)给定初始点x0和初始步长h,令x1=x0,记f1=f。3)比较函数值f1和f2的大小,确定向前或向后探测的策略。图7-35 利用增材制造技术制造的用于设计评估的样品图3-2 比较f2和f3用进退法确定搜索区间的计算框图如图3-3所示。搜索区间确定之后,便可运用一维优化方法在区间内找到极小点,一维优化方法很多,本文只介绍常用的两种方法——黄金分割法和二次插值法。
确定搜索区间一般采用进退法,其基本思路为:在函数的任一单谷区间上必存在一个极小点,而且在极小点的左侧,函数呈下降趋势,在极小点右侧函数呈上升趋势。因此,可从某一个给定的初始点x0出发,以初始步长h0沿着目标函数值的下降方向逐步前进(或后退),直至找到相继的3个试点的函数值按“大→小→大”变化为止。
进退法确定搜索区间的步骤如下:
1)给定初始点x0和初始步长h,令x1=x0,记f1=f(x1)。
2)产生新的探测点x2=x0+h,记f2=f(x2)。
3)比较函数值f1和f2的大小,确定向前或向后探测的策略。若f1>f2,则加大步长h,令h=2h,转4)向前探测;若f1<f2,则调转方向,令h=-h,转4)向后探测,如图3-1所示。
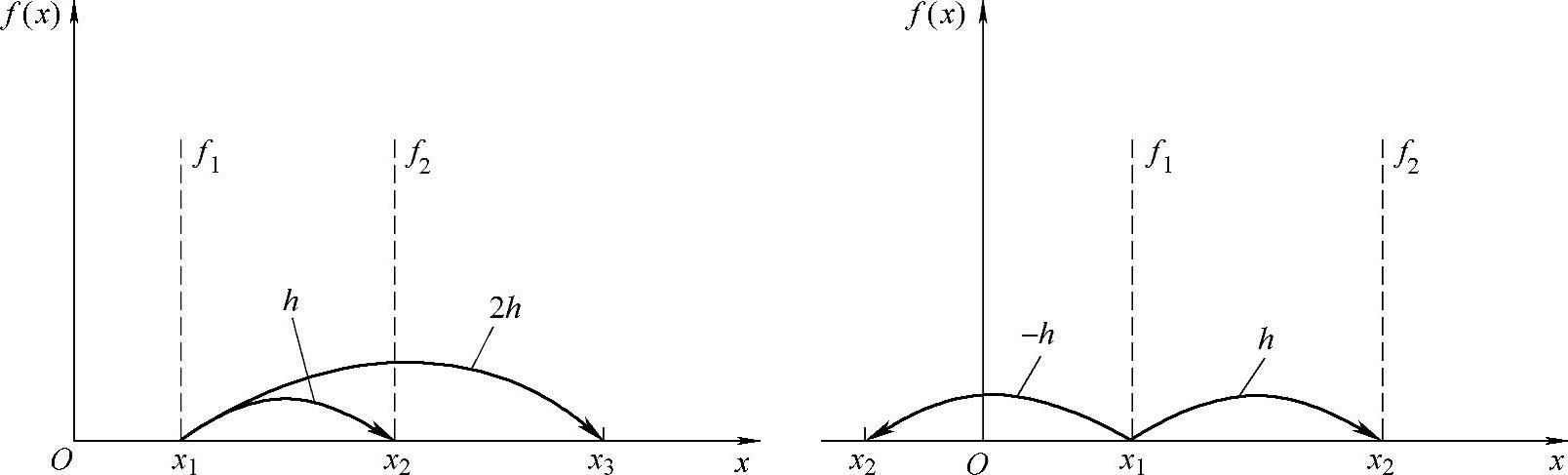
图3-1 进退探测(https://www.xing528.com)
4)产生新的探测点x3=x0+h,令f3=f(x3)。
5)比较函数值f2和f3的大小。若f2<f3,则初始区间已经得到,令c=x2,fc=f2,当h>0时,[a,b]=[x1,x3],当h<0时,[a,b]=[x3,x1];若f2>f3,则继续加大步长,令h=2h,x1=x2,x2=x3,转4)继续探测,如图3-2所示。
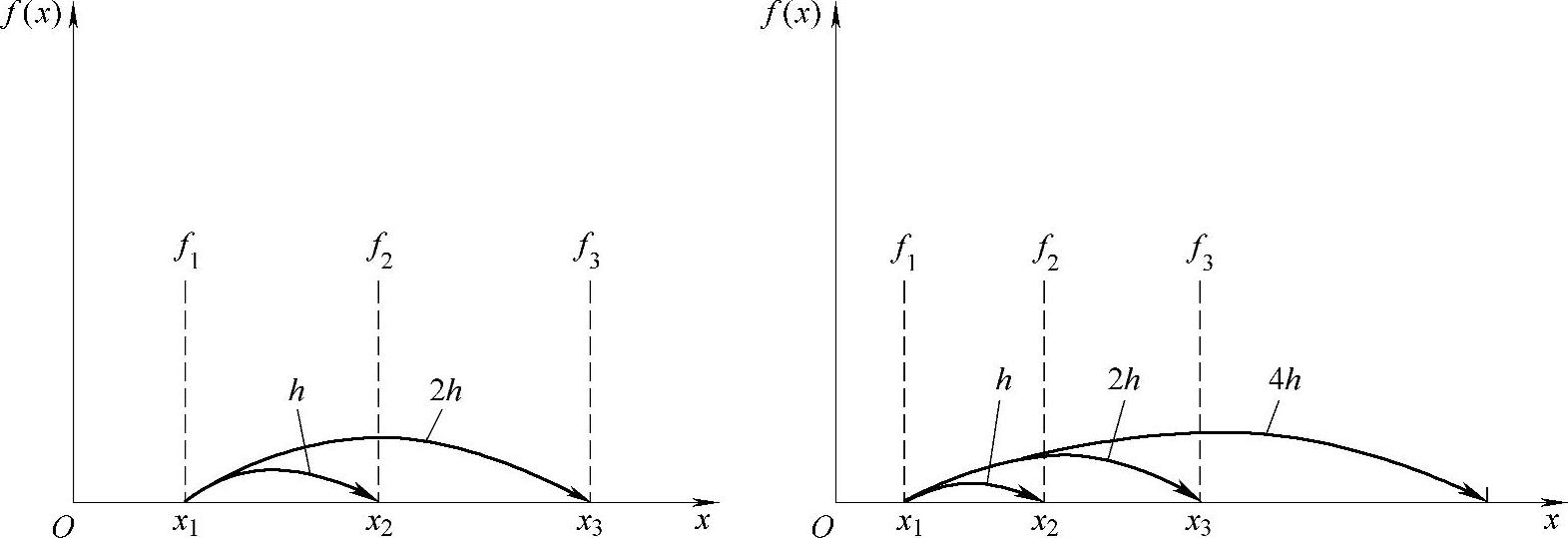
图3-2 比较f2和f3
用进退法确定搜索区间的计算框图如图3-3所示。
搜索区间确定之后,便可运用一维优化方法在区间内找到极小点,一维优化方法很多,本文只介绍常用的两种方法——黄金分割法和二次插值法。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。