



由于惯性的作用,电动机从切断电源到完全停止转动总要经过一段时间,这无疑影响了劳动效率。在实际生产中,为了实现快速、准确的停车,缩短时间,提高生产效率,必须对要求停转的电动机采取制动措施。制动的方法分为机械制动和电气制动两种。机械制动有电磁抱闸制动、电磁离合器制动等;电气制动有反接制动、能耗制动等。下面以反接制动为例进行说明。
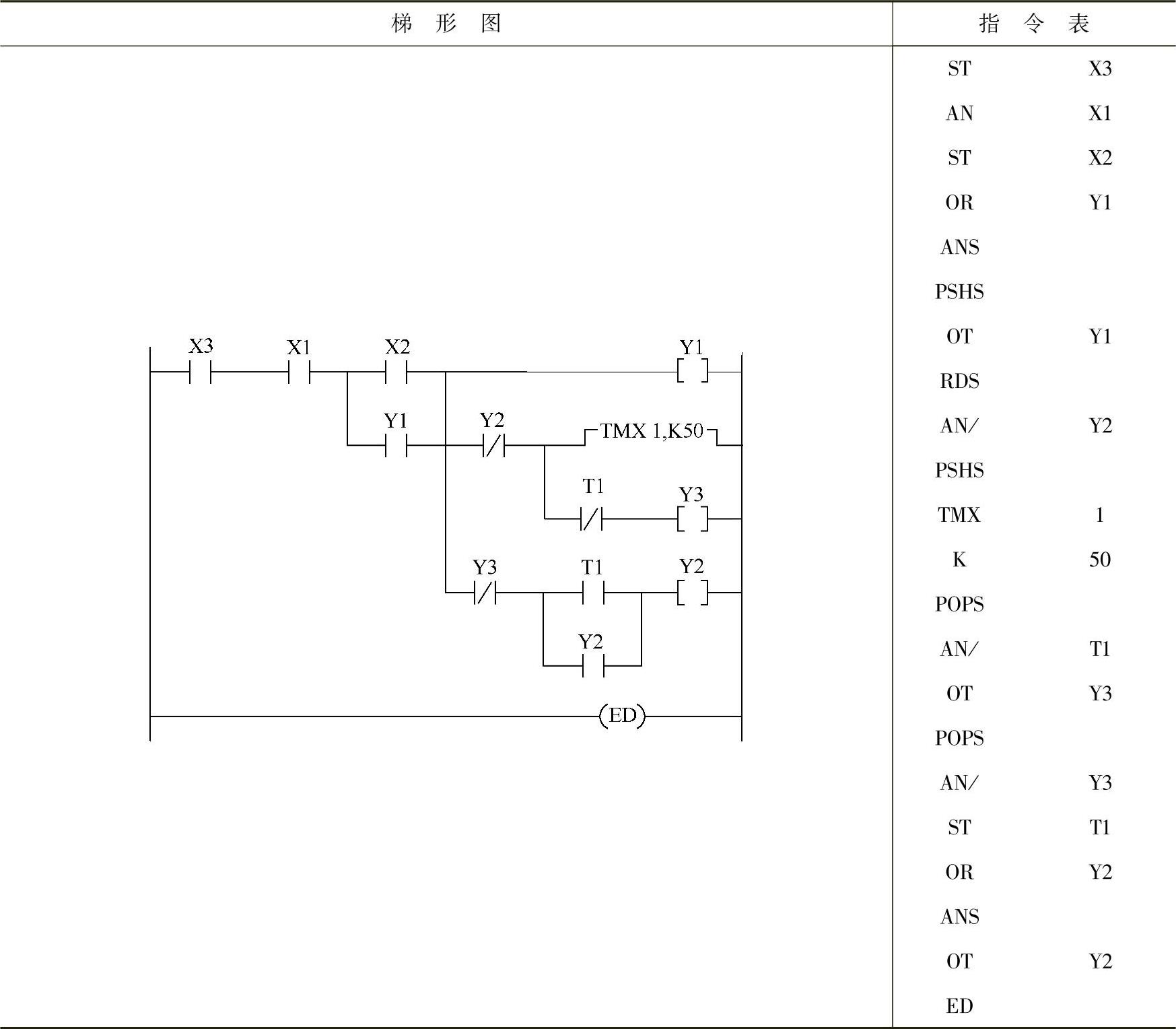
表2-47 梯形图和指令表
1.继电器控制结构
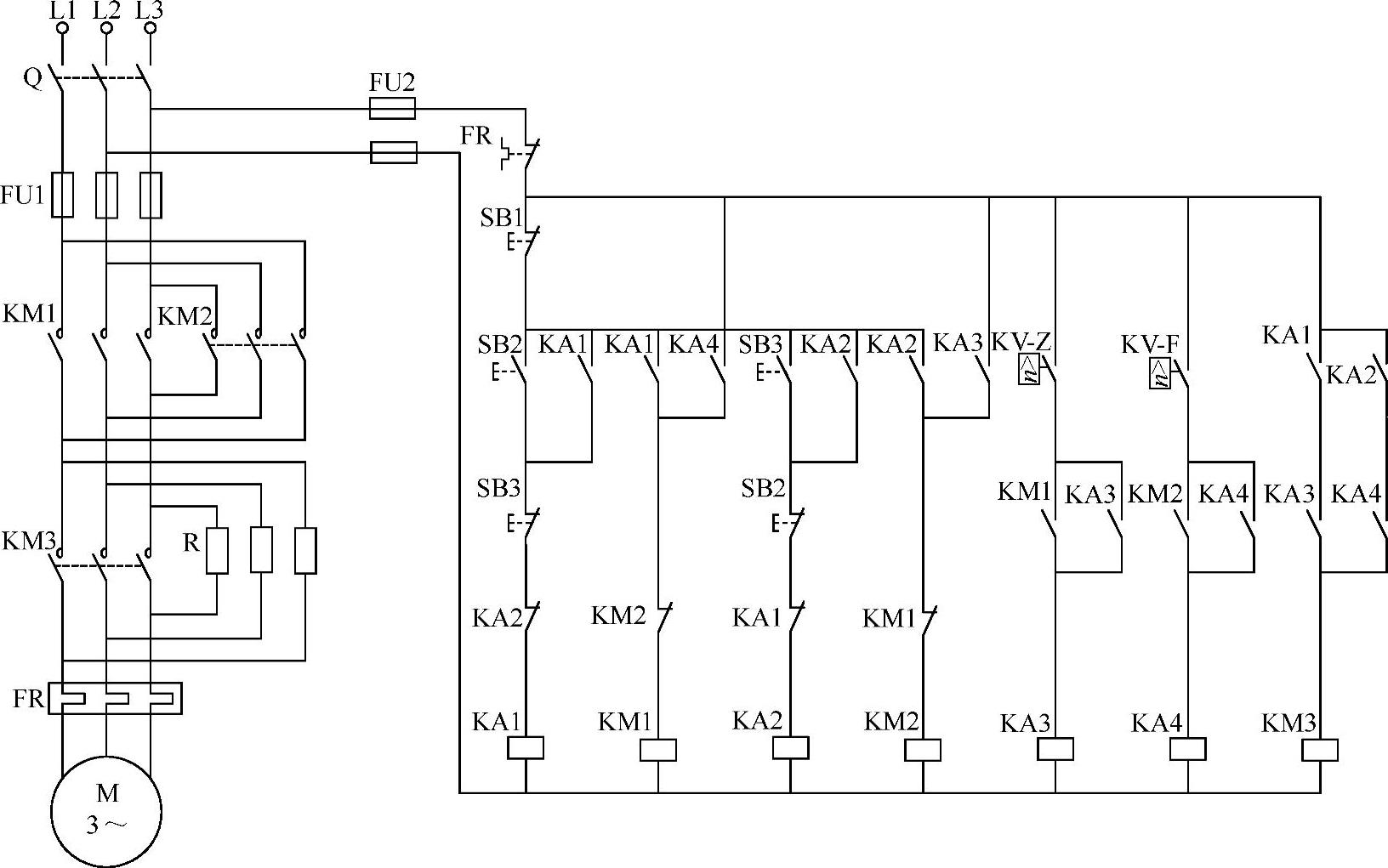
工作原理:在图2-54中,按下正向起动按钮SB2,中间继电器KA1的线圈得电,KA1的常开触点闭合并自锁,同时正向接触器KM1得电,主触点闭合,电动机正向起动。在刚起动时未达到速度继电器KV的动作转速,常开触点KV-Z未闭合,中间继电器KA3失电,KM3也处于断电状态,电阻R串联在线路中限制起动电流。转速升高后,速度继电器动作,常开触点KV-Z闭合,KM3线圈得电,其主触点短接电阻R,电动机起动结束。
按下停止按钮SB1(此时电动机正向转动),中间继电器KA1的线圈失电,KA1的常开触点断开接触器KM3的线圈,电阻R再次串联在电动机定子结构限制电流。同时,KM1的线圈失电,切断电动机三相电源。此时,电动机转速仍然较高,常开触点KV-Z仍闭合,中间继电器KA3线圈也还处于得电状态,在KM1线圈失电的同时又使KM2线圈得电,主触点将电动机电源反接,实现电动机反接制动,定子结构一直串有电阻R以限制制动电流。当转速接近0时,速度继电器的常开触点KV-Z断开,KA3和KM2的线圈失电,制动过程结束,电动机停转。
按下反向起动按钮SB3,如果电动机正处于正转运行状态,反向按钮SB3同时切断KA1和KM1的线圈,然后中间继电器KA2的线圈得电,KA2的常开触点闭合并自锁,同时反向接触器KM2的线圈得电,主触点闭合,电动机反向起动。在刚起动时未达到速度继电器KV的动作转速,常开触点KV-F未闭合,中间继电器KA4失电,KM3也处于断电状态,因而电阻R串联在线路中限制起动电流。当转速升高后,速度继电器动作,常开触点KV-F闭合,KM3线圈得电,其主触点短接电阻R,电动机起动结束。
 (https://www.xing528.com)
(https://www.xing528.com)
图2-54 反接制动控制原理图
2.PLC控制程序设计
I/O分配见表2-48,梯形图和指令表见表2-49。
表2-48 PLC控制I/O分配表
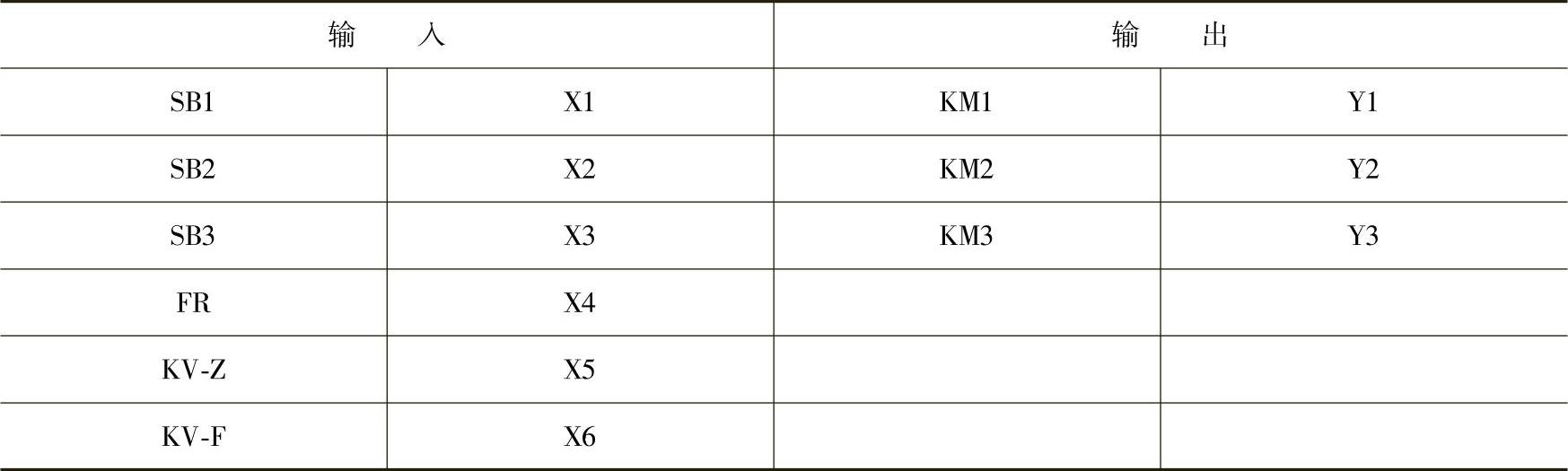
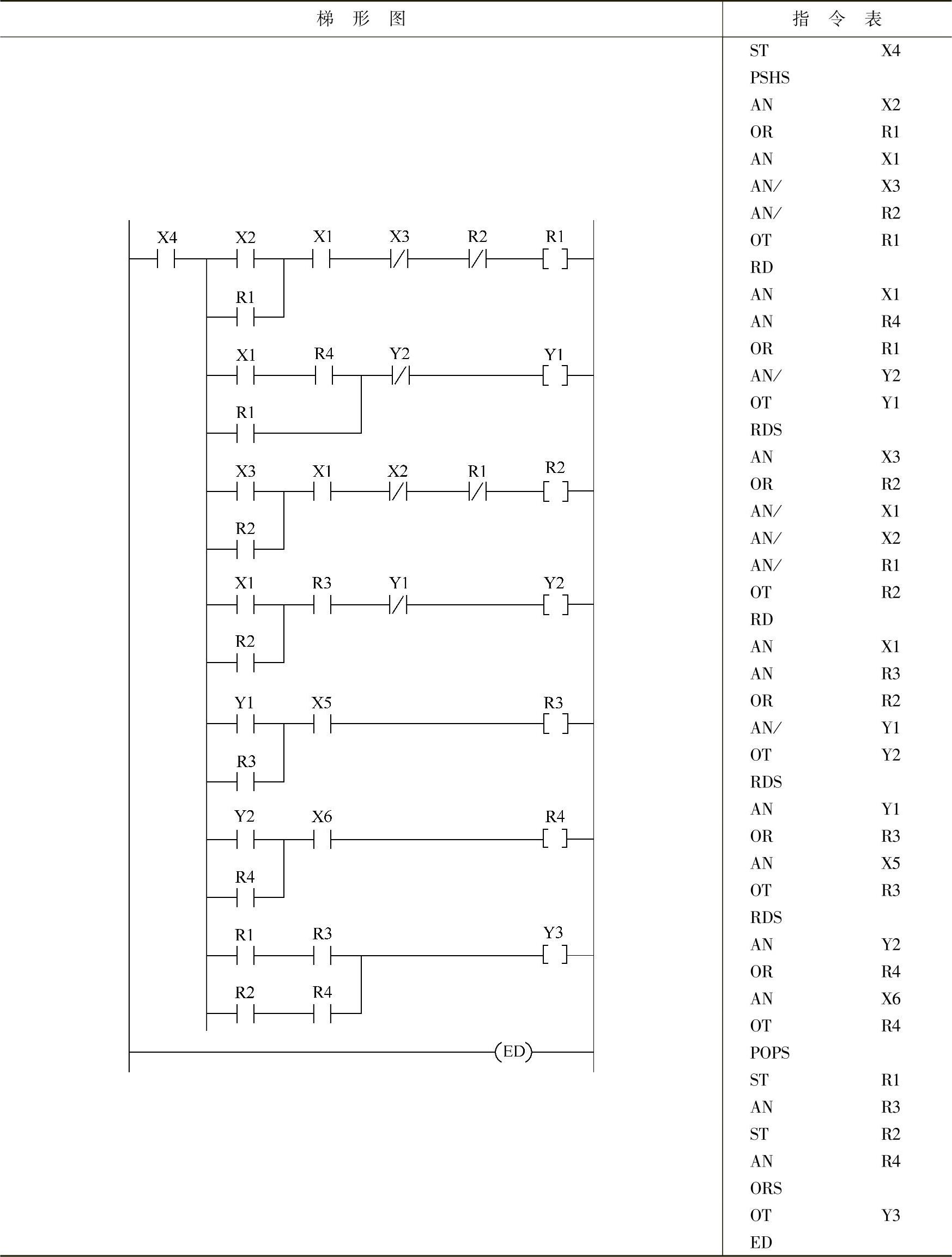
表2-49 梯形图和指令表
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。