



我们以“运料小车”控制为例来认识一下顺序控制的基本结构,图4-1所示为运料小车示意图。
其控制要求如下:小车开始停在左侧限位开关SQ2处,按下起动按钮SB1,开始装料,装料时间为20s,装料结束后小车右行,碰到右侧限位开关SQ1,开始卸料,经过10s后,小车自动左行,碰到左侧限位开关后,停止运行。
图4-2所示为运料小车控制的顺序功能图,它由步、有向线段、转换及转换条件和动作(或命令)四个部分组成。
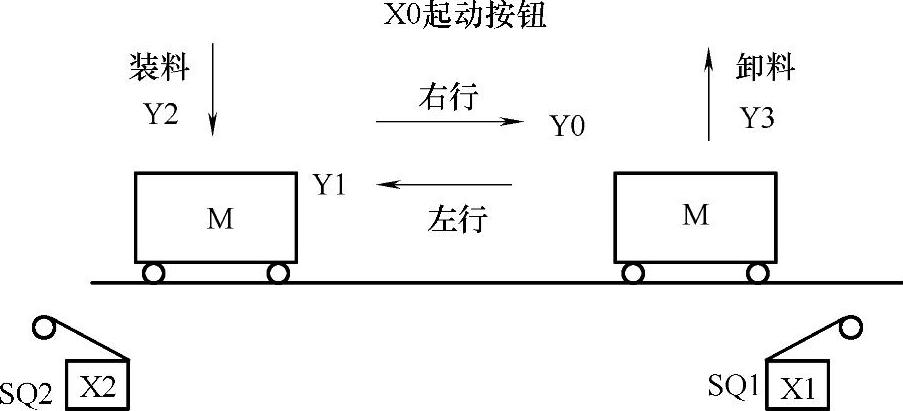
图4-1 运料小车运行示意图

图4-2 运料小车控制的顺序功能图
1.步
顺序控制的思想就是把一个控制系统的工作周期分为几个顺序相连的工序,这些工序就称为“步”,步可以用编程软元件M或S来表示,我们在后面学习步进顺序控制,用状态元件S来表示。
“步”是控制系统中的一个相对稳定的状态,步的划分原则是,根据输出量的状态变化来划分,也就是说在任何一步内,各个输出量的ON/OFF状态不变,但相邻步的输出量的状态是不同的。顺序功能图中的“步”分为初始步和活动步。
(1)初始步(https://www.xing528.com)
与系统的初始状态相对应的步称为初始步。初始状态是系统运行的起点,初始步用双线框表示,如 ,每一个顺序功能图至少有一个初始步。
,每一个顺序功能图至少有一个初始步。
(2)活动步
当系统正处于某一步所在的阶段时,该步就处于活动状态,我们把该步称为“活动步”,用矩形框表示,如 。步处于活动状态时,后面的动作将被执行;步处于不活动状态时,后面的动作将被停止(存储型动作除外)。
。步处于活动状态时,后面的动作将被执行;步处于不活动状态时,后面的动作将被停止(存储型动作除外)。
2.有向线段
步与步之间的有向线段用来表示步的活动状态和进展方向。从上到下和从左到右这两个方向上的箭头可以省略,其他方向上必须加上箭头用来注明步的进展方向。
3.转换及转换条件
转换是垂直于有向线段的短划线,其作用是将相邻的两步分开。转换旁边要注明转换条件,它是与转换有关的逻辑命题,转换条件可以用文字语言、布尔代数表达式或图形符号进行标注。转换条件可以为一个,也可为多个的逻辑组合。
4.动作(或命令)
一个步表示控制过程中的稳定状态,它可以对应一个或多个动作。可以在步的右边加一个矩形框,在框中用简明的文字说明该步对应的动作。一个步可以有一个或多个动作。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。