



为了验证系统的定位性能、研究定位的影响因素,搭建了一套试验样机用于定位试验,样机构成如图8-2所示,样机测试实物如图8-3所示。样机中包含一个MC102/550097型电容传感器、一个PMD-1608FS型六通道同步采样数采集卡;两个供电器,一个ThinkPad E430型笔记本计算机及四个三脚架。
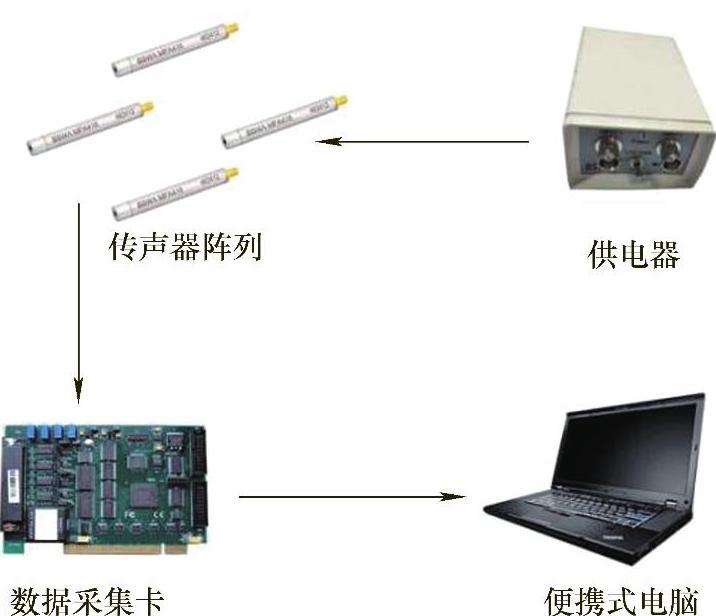
图8-2 样机构成简图

图8-3 样机测试实物图
试验设置的系统采样率为100kHz,采样时长为3s,分析点数为2000点,声源频率为2000~3000Hz。四个传感器坐标为S0(0,0,0)、S1(0,-0.5,-0.5)S2(0.5,0,-0.5)、S3(0.5,-0.5,-0.5),S0设为参考传感器。
试验开始前,先测量当地声速。在(2,0,0)处发声6次,测得相距0.5m的1号、2号传声器的平均时差为0.00144s,故当地声速为347.22m/s。
为了验证系统对于空间中任意位置定位的有效性,测点位置需要有随机性。研究中用MATLAB中的round(rand(1,10)×5)函数在空间中随机生成10个位置点,再将声源放置在这10个位置做定位测试。测试点坐标分别是(1.5,0,1)、(2,0,0)、(2.5,1,0.8)、(1,0.8,1)、(2,1.5,2.5)、(0.6,1.3,2.5)、(0,0.2,1)、(0,0.8,2)、(0.95,0,1.5)、(1.5,0,3)。声源为手持式扩音器,声音清晰响亮,便于移动。
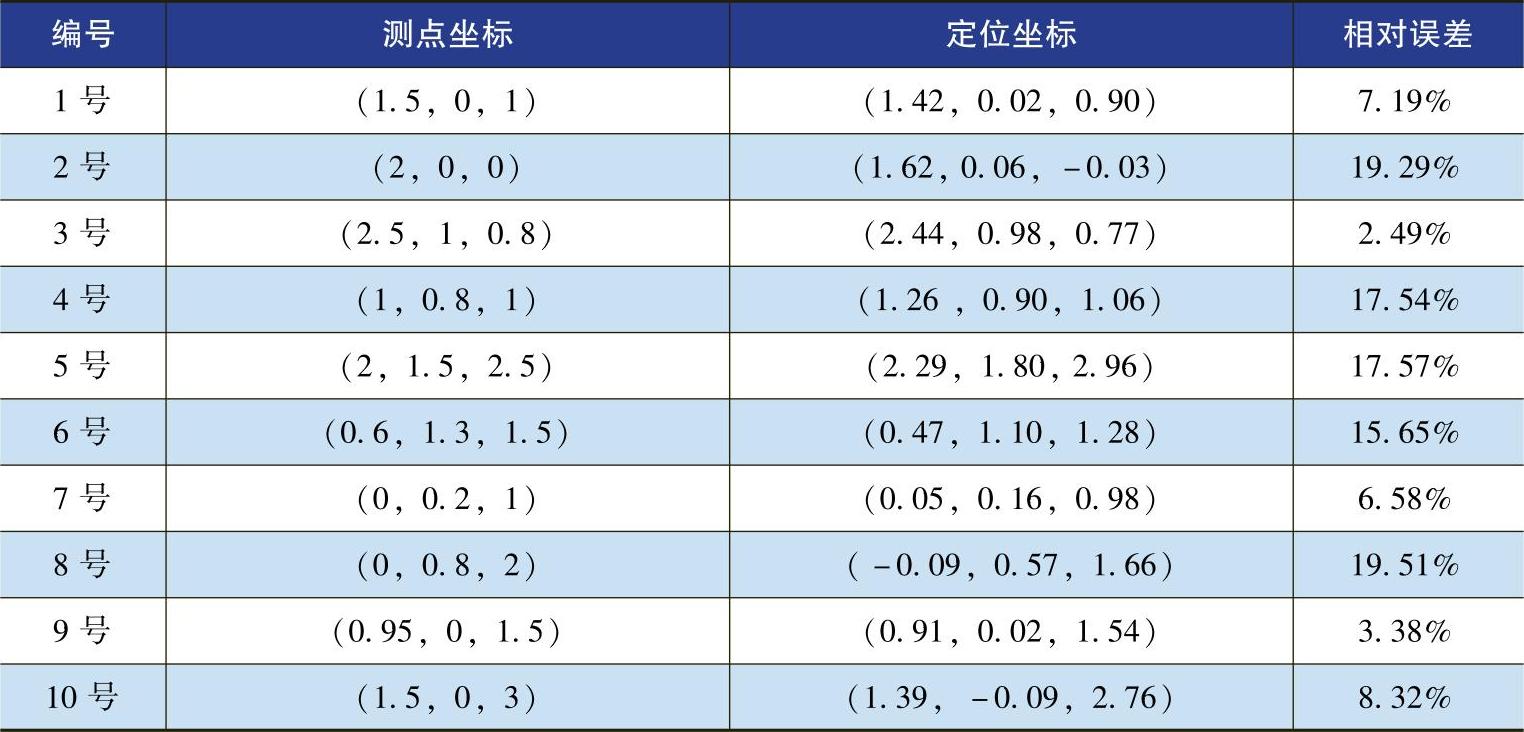
以时域图的形式显示同步采集到的四路信号,从图8-4中可以观察出它们有明显的相位差。计算它们的信噪比,SNR=12,可以进行互相关运算。由互相关算法计算各个传感器与参考传感器之间的时间延迟,得到Delay0-1、Delay0-2、Delay0-3三个时延值。最后将时延值、声速、传感器坐标代入定位方程(4),用牛顿迭代法求解之,即可得到声源坐标。定位结果列于表8-2中,定位结果三维图示与测点位置对比如图8-5所示。定位试验结果表明,系统可以实现实时的较为准确的三维定位。定位系统对不同位置声源的定位误差在30cm以内,相对误差在3%~20%之间。(https://www.xing528.com)
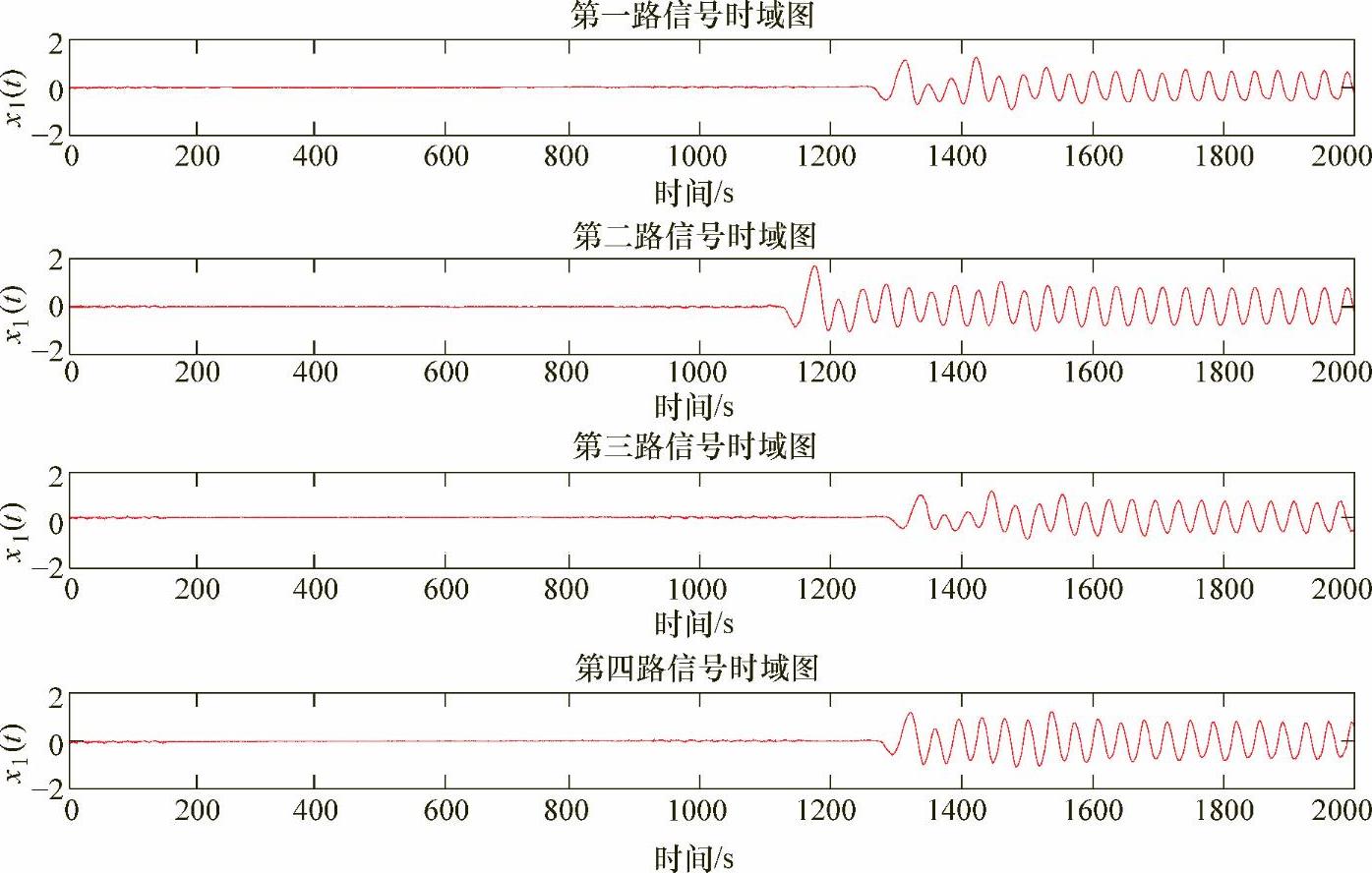
图8-4 四个传感器所采集信号时域图
表8-2 定位试验结果
定位结果显示,系统可以实现三维空间内任意方位的定位,但是定位精度仍有提升的空间。影响定位结果的参数主要有传声器固定位置、传声器阵列尺寸与形式、时延值、声源频率。下面将逐一对这些参数进行研究。
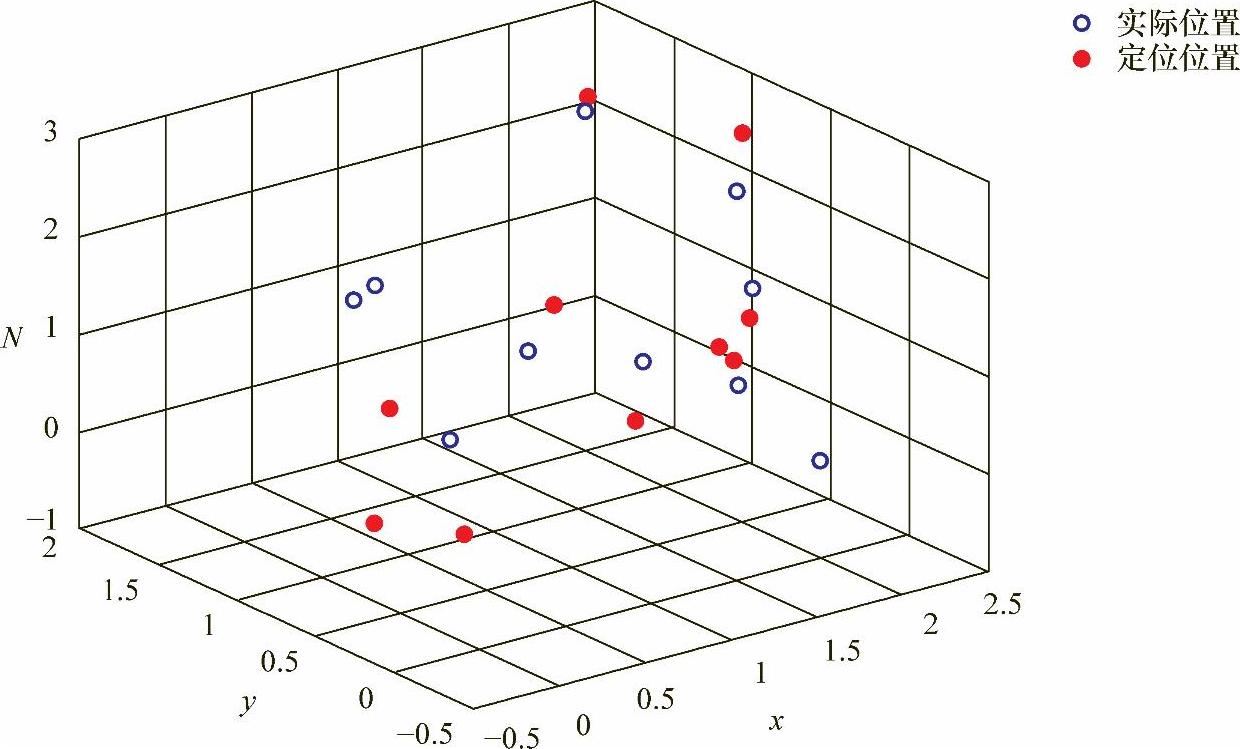
图8-5 定位结果三维图示与测点位置对比
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。