



【摘要】:根据锅炉炉膛的形状及空间限制,选择将四个声音传感器采用空间布置,并组成一个四个测点的空间阵列。图7-8 声音传感器阵列与泄漏声源的相对位置关系声音传感器阵列与泄漏声源的相对位置关系如图7-8所示,建立空间直角坐标系。S1、S2、S3声音传感器的坐标可以根据布置位置对应更改xi、yi、zi的数值。经初步计算发现其求解效果理想,故决定采用牛顿迭代法作为该非线性方程组的求解方法。
上文提到,决定采用基于时延(TDOA)的定位算法。算法确立后,需要结合实际情况及物理模型选择合适的阵列。目前,广泛应用的有空间阵列、圆阵列、平面阵列。根据锅炉炉膛的形状及空间限制,选择将四个声音传感器采用空间布置,并组成一个四个测点的空间阵列。
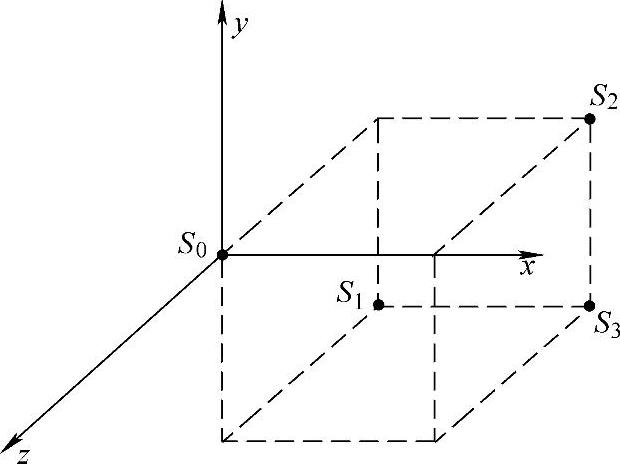
图7-8 声音传感器阵列与泄漏声源的相对位置关系
声音传感器阵列与泄漏声源的相对位置关系如图7-8所示,建立空间直角坐标系。声音传感器的坐标分别为S0(x0,y0,z0)、S1(x1,y1,z1)、S2(x2,y2,z2)、S3 (x3,y3,z3)。为简化计算,将S0声音传感器的坐标里面的数值设置为0,即固定在坐标原点。S1、S2、S3声音传感器的坐标可以根据布置位置对应更改xi、yi、zi的数值。假定声源A在空间直角坐标系中为理想声源——点声源,坐标为(x,y,z),并以球面的方式进行传播。根据两点之间的距离公式,声源A可以和声音传感器S0、S1、S2、S3联立起来,建立一个非线性方程组,简化如下:(https://www.xing528.com)

式中:di为声源到传感器Si与到坐标原点的距离差(两个传感器的声程差)(m);ri为传感器Si到坐标原点,也就是Si与S0的距离(m)。
牛顿迭代法是求解非线性方程组的重要方法之一,且适合MATLAB编程。经初步计算发现其求解效果理想,故决定采用牛顿迭代法作为该非线性方程组(定位方程组)的求解方法。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。