



1.工作原理
目前所使用的声音传感器按其工作原理可分为电容式(包括静电式)、压电式、电致伸缩式。
(1)电容式 它的工作原理是基于加到电容器极板上的电压、电容和电荷存在着联系。在最简单的方案中,当电容器极板间的距离在声波作用下改变时,电容器的电容发生变化。因此,在电路中产生可以测量的电流。在比较复杂的情况下,电容器被接入高频简谐振荡器的电路内;声振动用做低频调制。这种形式的声音传感器成功应用于记录超低频声振动。
(2)压电式 某些晶体受力产生变形时,其表面出现电荷而又在电场的作用下,晶片发生弹性变形,这种现象称为压电效应。基于晶体原件的压电效应,将声源引起的振动转化成电压信号。压电材料多为非金属介电晶体,包括锆钛酸铅、钛酸铅、钛酸钡等多晶体和铌酸锂、碘酸锂等单晶体。其中锆钛酸铅(PZT-5)接收灵敏度高,是声音传感器常用的压电材料;铌酸锂晶体居里点高达1200℃,常用做高温传感器。
(3)电致伸缩式 有些多晶材料如锆钛酸铅陶瓷等,存在着自发形成的分子集团即所谓电畴,它具有一定的极化,并且沿极化方向的长度往往与其他方向的不同。当有外加电场作用时,这种电畴就会发生转动,使其极化方向尽量转到与外电场方向一致。因此这种材料沿外电场方向的长度会发生变化,这种现象称为电致伸缩效应。基于晶体材料的电致伸缩效应,将声源引起的振动转化成电压信号。
2.主要的声学特性
声音传感器的主要特性如下。
自由场电压灵敏度G,定义为在无扰动平面波场中,接收器的开路输出电压Ux与作用于声音传感器的声压之比值[V/Pa],即
Gx=Ux/P (7-1)
(1)阈值PM 当测量带宽为1Hz、信号/干扰=1时,信号的声压值(换言之,在声音传感器输出端上产生与声音传感器固有噪声产生相同电压的均方声压值)。
(2)灵敏度指向性(简称指向性)D(r) 在声音传感器的远场、离开声音传感器固定距离上,在矢量半径r方向上,位于自由空间的声音传感器所接收到的信号与在某个固定方向r0所接收到的信号之比值与空间方向的关系。r0方向一般与最大灵敏度方向重合。一般情况下,D(r)=R(r)exp(jΔφp),是复数量;其中R(r)=D(r)是幅度方向性,它描述灵敏度与其最大值的偏离;而Δφp为声音传感器的相位特性,它由平面单色波中的真实相位与在声音传感器输出端上信号相位的差值。
(3)相位 若要将多个声传感器装配成传感器阵列,必须考虑各个传感器的相位是否一致;若不一致,必须进行校准。这是因为在定位算法中进行了阵列模型假设,即假设了阵列各阵元具有相同的幅度灵敏度和相位误差。但在实际应用时,由于各个麦克风之间的差异,如放大电路增益不一致、采样电路时钟不同步、麦克风阵列机械加工精度低,都将导致算法性能急剧下降。
(4)动态范围Δd 信号幅度的测量范围,在此范围内声音传感器可以用来测量声场参数。一般动态范围定义为过载声压值(Pmax)与阈值(PM)之比,即
Δd=20lg(Pmax/PM) (7-2)
此外,还经常使用以下特性判断声音传感器的制作质量。
3.类型与选择
声音传感器属检测系统的关键部件,其响应多敏感于表面振动的垂直位移,包括位移、位移速度、位移加速度,这主要取决于声音传感器的频率响应和灵敏度特性。
在声音传感器的供电方式上分为200V极化电压型和预极化型;在测量应用中分为自由场,压力场和扩散场;在尺寸上分为1/4in(1in=25.4mm),1/2in和1in。
1)预极化型声音传感器。在声音传感器的后极板的驻极体材料中注入电荷,使膜片和后极板之间有电场存在。这就相当于极化电压的作用,无须外部的极化电压,如200V极化电压型声音传感器。由于需要前置放大器提供200V极化电压在膜片和后极板之间。因此需要配备专门的前置放大器和供电器,输出接口通常是Lemo 7芯连接器。(https://www.xing528.com)
2)自由场。适用范围为环境、车内、车外、消声室、混响室内的声学测量。当声音传感器放入声场中时,会改变原有的声场。自由场声音传感器测量到的是消除了传感器对声场影响的声压。
3)压力场。适用范围为小腔内,如人工耳、物体表面声压等。压力场声音传感器测量到的是作用在声音传感器膜片上的声压。在测量10000Hz以下的频响时,压力场声音传感器也可用于自由场和无规则入射声场环境下。
4)扩散场。只有美国标准中规定了使用无规则入射声音传感器,在我国和其他地区则无此标准和规定。如果测量方式需要符合美国ANSI标准,则应选无规则入射声音传感器。
4.声音传感器灵敏度的校准方法
声音传感器的标定方法因激励源和传播介质不同,可以组成多种多样的方法。激励源又分为噪声源、连续波源和脉冲波源等三种类型。噪声源又有氦气喷射、应力腐蚀和金镉合金相变等;连续波源可以由压电传感器、电磁传感器、磁致伸缩传感器等产生;脉冲波源可以由电火花、玻璃毛细血管破裂、铅笔芯断裂、落球和激光脉冲等产生。传播介质可以是钢、铝或其他材料的棒、板和块。
作为声音传感器的标定源,在测量的频率范围内,希望具有恒定的振幅。已知单位脉冲函数δ(t)的振幅频谱为: 。可见,理想的激励源应该是δ-源——脉冲源。比较常用的脉冲源有玻璃毛细管破裂方法、铅笔芯断裂法、电火花方法。
。可见,理想的激励源应该是δ-源——脉冲源。比较常用的脉冲源有玻璃毛细管破裂方法、铅笔芯断裂法、电火花方法。
(1)声音传感器绝对灵敏度校准 绝对灵敏度校准有表面波脉冲法和互易法两种。绝对灵敏度(M),一般用在一定频率下,传感器的输入电压(V)与表面垂直位移速度(m/s)之比来表示,其单位为V/(m/s)。
1)表面波脉冲法。在半无限体钢制试块表面上,以铅笔芯或玻璃细管的断裂作为阶段跃力点源,如测得标准电容位移传感器和待校传感器对表面波脉冲的响应,则即可按定义算出绝对灵敏度。该校准方法已纳入ASTM标准(ISO 12713:1998(E)、ISO 12714:1999(E)),在100kHz~1MHz频率内,校准的不确定度可达±15%(90%置信度)。我国也已建立起此类校准系统,差动宽频带传感器绝对灵敏度曲线如图7-2所示。
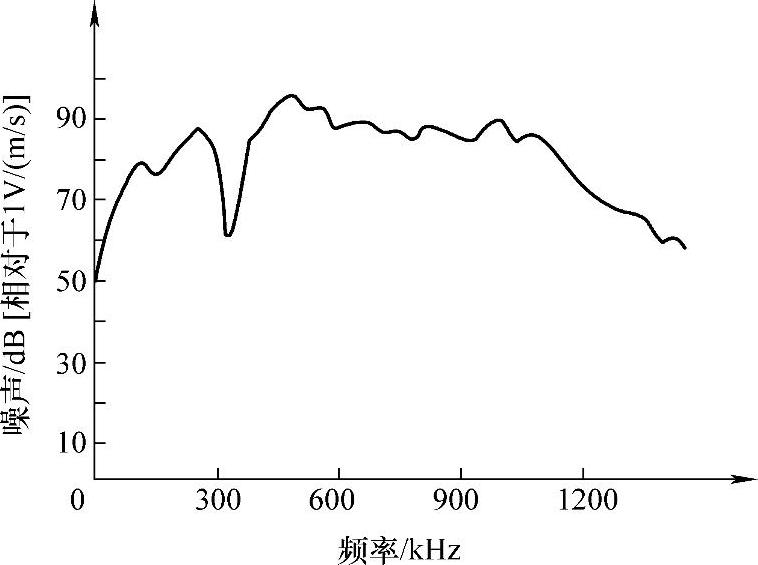
图7-2 差动宽频带传感器绝对灵敏度曲线
表面波脉冲法操作不便,但与检测实际相近。除了一般传感器校准外,还可用于二级标准传感器的校准。
2)互易法。根据传感器的机电变换的可逆性原理,在半无限体试块表面上,只要比较一组同类传感器之间的电气特性,即可测出绝对灵敏度。此法不需直接测量表面的法向位移,因而操作比较简便。但是,每次校准需提供三个同类代校传感器。该方法已纳入日本无损检测协会标准,在50kHz~1MHz频率内,可提供表面波和纵波灵敏度检测。
(2)传感器相对灵敏度校准 在批量检测中,需要一种简便而经济的相对校准方法,以比较传感器灵敏度的变化。此类方法只提供传感器对模拟源的相对幅度或频率响应。
常用的对接法,一般由小型试块、以扫频仪为激励源的超声传感器(谐振频率大于2.5MHz)及电压表构成,可用来比较传感器的频率响应。作为一种简便方法,可由小型试块、电脉冲发生器、声音传感器等构成。用声音传感器记录对模拟信号的响应幅度,也可与已知灵敏度的标准传感器做比较,实例如图7-3所示。
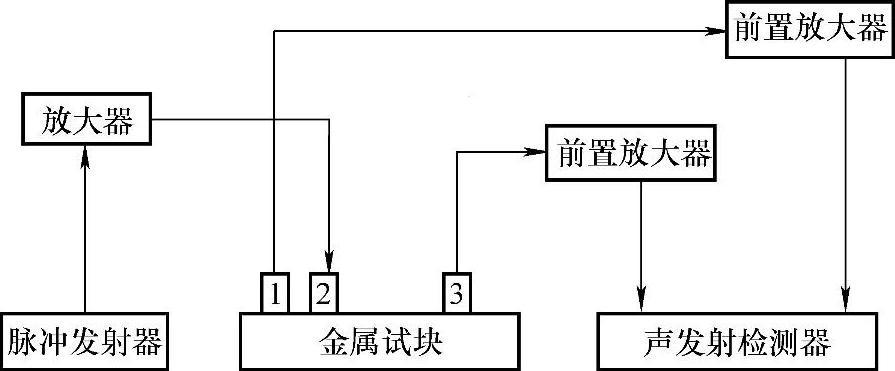
图7-3 相对校准实例
1—标准传感器 2—压电传感器 3—待校传感器
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。