



802D参数设定:驱动器速度环电流环参数优化。
对于伺服系统,首先要对速度环的动态特进行调试,然后才能对位置环进行调试。速度环动态特性优化是通过SimoComU进行的。
1)首先利用准备好的“驱动器调试电缆”将计算机与611UE的X471连接起来。
2)如果对带制动的电动机进行优化,需要设定NC通用参数MD14512[18]的第1位为“1”(优化完毕后恢复“0”)。
3)驱动器使能(电源模块端子T48、T63和T64与T9接通);并将坐标移动到适中的位置(因为优化时电动机要转大约两转);优化时驱动器的速度给定由计算机以数字量给出。
4)然后进入工具软件SimoComU;且选择联机方式 ;然后选择PC机控制
;然后选择PC机控制 ,选择“OK”,如图4-100所示。
,选择“OK”,如图4-100所示。
5)进入控制器目录(Controller),出现图4-101所示的界面。
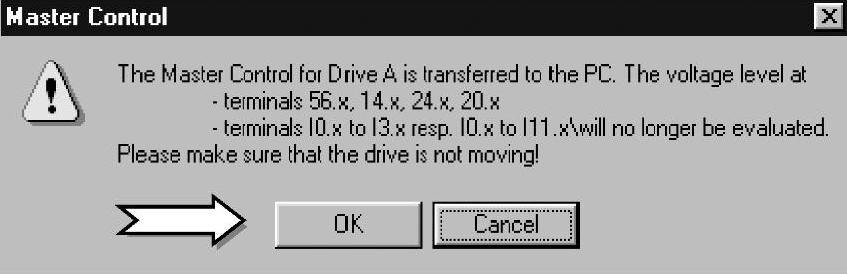
图4-100 控制方式
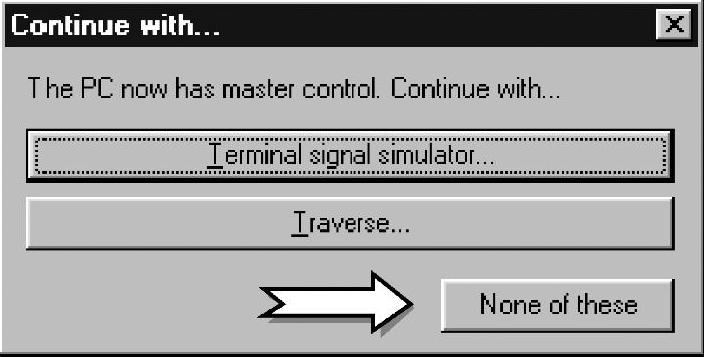
图4-101 控制器目录
6)选择“None of these”,接着将出现图4-102所示的界面。
选择运行自动速度控制器优化“Execute automatic speed controllersetting”。(https://www.xing528.com)
7)进入优化后出现图4-103所示的界面。
选择“1~4步”自动执行优化过程:
第1步,分析机械特性一(电动机正转,带制动电动机的抱闸应释放)。
第2步,分析机械特性二(电动机反转,带制动电动机的抱闸应释放)。
第3步,电流环测试(电动机静止,带制动电动机的抱闸应夹紧)。
第4步,参数优化计算。
执行完第2步时,调试工具软件SimoComU会出现:“电流环优化,垂直轴的电机抱闸一定要夹紧,以防止坐标下滑”的提示。
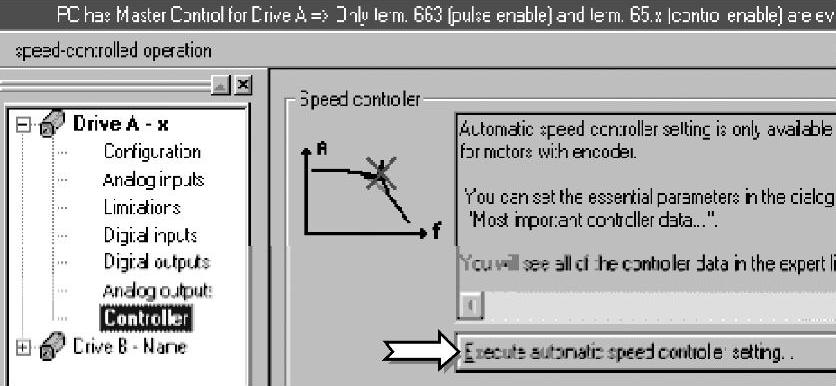
图4-102 画面显示
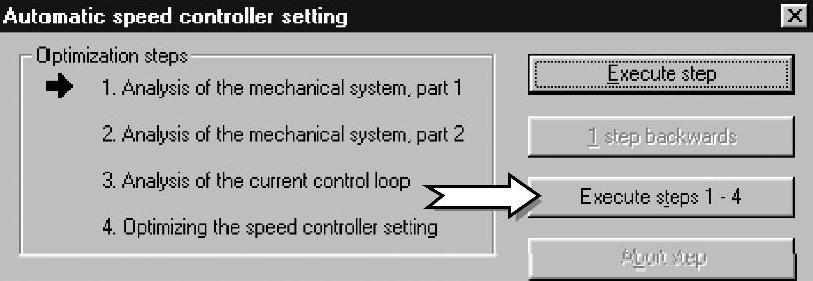
图4-103 自动速度控制设置
注意:垂直轴电动机制动释放的安全条件。对垂直轴的伺服参数优化时,一定要注意优化过程中对抱闸释放和夹紧的时机,避免出现由于坐标轴滑落导致机械的损坏。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。