



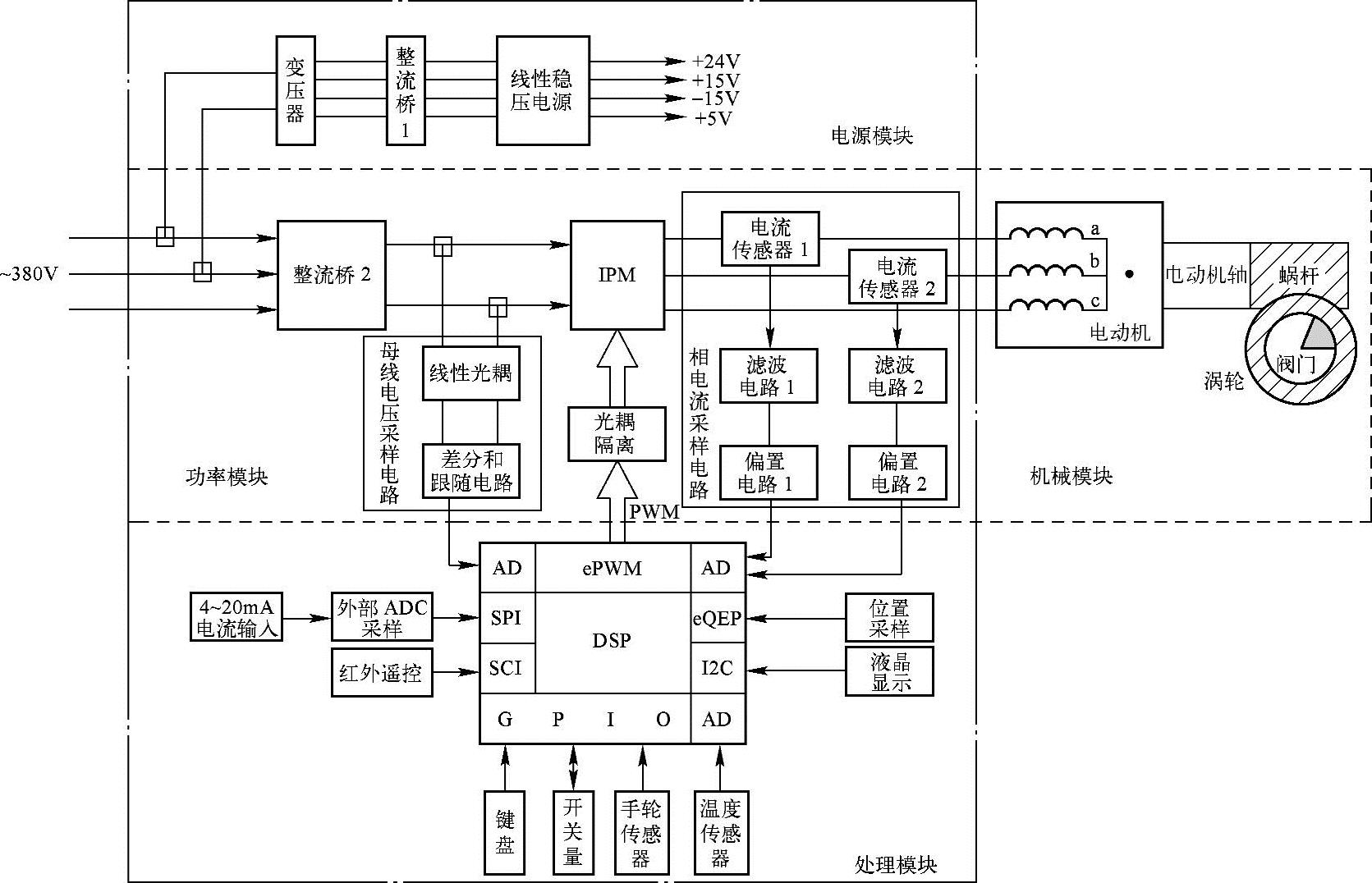
基于TMS320F28335芯片的矢量控制电动执行器的系统结构图如图8-12所示,其由电源模块、功率模块、处理模块和机械模块组成。
1.电源模块
电源模块包括变压器、整流桥1和线性稳压电源。取三相380V电压的其中两相,经过变压器后输出不同电压等级的交流电压,送入第一整流桥;第一整流桥将交流电整流成直流电压;为了减小直流电压的纹波,将直流电压送入线性稳压电源,经过电压调节后输出+24V、+15V、-15V、+5V的直流电压给相应模块供电。
2.功率模块
功率模块包括380V三相电源接口、整流桥2、光隔离电路、IPM功率器件、母线电压采样电路(包括线性光耦、差分和跟随电路)、相电流采样电路(包括电流传感器1、电流传感器2、滤波电路1、滤波电路2、偏置电路1和偏置电路2)。
电流传感器1和电流传感器2对机械模块中电动机的ab两相的相电流进行采样。根据三相平衡原理,可以得到第三相c相的电流。由于电动机运行过程中的干扰很大,会影响采样结果,因此设计低通滤波器来滤除高频干扰。第一电流传感器1和第二电流传感器2输出的是双极性信号,而TMS320F28335 DSP的内部AD电压采样范围是0~3V的单极性信号,负电压会对DSP造成损害,因此设计+1.5V的偏置电路1和偏置电路2,即电流为零时对应的采样电压为1.5V,从而将电流的采样电压范围转化为0~3V,满足了DSP的要求;母线电压的采集是通过线性光耦实现的,母线电压经过分压处理后输入到线性光耦,再经过差分和跟随电路,输入到DSP的AD引脚。
 (https://www.xing528.com)
(https://www.xing528.com)
图8-12 基于矢量控制的电动执行器系统结构图
3.处理模块
处理模块是整个系统的核心,包括DSP控制器、键盘、开关量、手轮传感器、温度传感器、位置采样、红外遥控、4~20mA电流输入、外部AD采样和液晶显示。处理模块的功能是实现电动机的控制、定位、检测、监控等算法,还提供必要的通信功能。
4~20mA的电流经过外部AD采样单元进行采样,输入到DSP的SPI模块,从而将目标位置信息传到DSP中;当前的位置是通过DSP中的eQEP模块读取的;母线电压采样电路和相电流采样电路分别采样母线电压和两相相电流,传到DSP的AD引脚,实现电压和电流的采样;DSP的ePWM单元经过计算后生成用于控制的PWM波,经过光隔离电路,输出到IPM,实现电动机的控制和定位;定位过程的信息通过DSP的I2C接口传输到液晶显示单元进行实时显示;键盘和开关量通过DSP的GPIO来实现信息交换;红外遥控单元通过SCI实现执行器功能的选择和参数的设置;在断电的情况下,需要手动将执行器调节到位,因此,电动执行器安装有手轮传感器,人力转动手轮时,手轮传感器记录位置脉冲,待到重新上电后,由DSP读取位置脉冲,重新定位,这通过DSP的GPIO口实现;另外,为了防止电动机过热而烧毁,还安装有温度传感器,一旦温度过高,就停止电动机运行,直到温度降到允许值为止,通过DSP的AD口实现对温度传感器输出值的采样。
4.机械模块
机械模块包括电动机本体、电动机轴所连接的蜗杆、与蜗杆相啮合的涡轮以及阀门。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。