



【摘要】:为此,需对上述牛顿法进行改进,引入数学规划法的搜寻概念,提出所谓“阻尼牛顿法”。αk可通过如下极小化过程求得:f=f=minf这样,原来的牛顿法就相当于阻尼牛顿法的步长因子αk取成固定值1的情况。阻尼牛顿法的计算步骤如下:1)给定初始点X0,收敛精度ε,置k←0。图10-9 阻尼牛顿法的程序框图图10-9 阻尼牛顿法的程序框图
从牛顿法迭代公式的推演中可以看到,迭代点的位置是按照极值条件确定的,其中并未包含有沿下降方向搜索的概念。因此对于非二次函数,如果采用上述牛顿迭代公式,有时会使函数值上升,从而出现f(Xk+1)>f(Xk)的现象。为此,需对上述牛顿法进行改进,引入数学规划法的搜寻概念,提出所谓“阻尼牛顿法”。
如果我们把dk=-[▽2f(Xk)]-1▽f(Xk)看作是一个搜索方向,称其为牛顿方向,则阻尼牛顿法采用如下的迭代公式:

式中 αk——沿牛顿方向进行一维搜索的最佳步长,可称为阻尼因子。
αk可通过如下极小化过程求得:
f(Xk+1)=f(Xk+αkdk)=minf(Xk+αdk)
这样,原来的牛顿法就相当于阻尼牛顿法的步长因子αk取成固定值1的情况。由于阻尼牛顿法每次迭代都是在牛顿方向上进行一维搜索,这就避免了迭代后函数值上升的现象,从而保持了牛顿法二次收敛的特性,面对初始点的选取并没有苛刻的要求。
阻尼牛顿法的计算步骤如下:(https://www.xing528.com)
1)给定初始点X0,收敛精度ε,置k←0。
2)计算▽f(Xk)、▽2f(Xk)、[▽2f(Xk)]-1和d=-[▽2f(Xk)]-1▽f(Xk)。
3)求Xk+1=Xk+αkdk,其中αk为沿dk进行一维搜索的最佳步长。
4)检查收敛精度。若‖Xk+1-Xk‖<ε,则X*=Xk+1,停止计算;否则,置k←k+1,返回到第2)步继续进行搜索。
阻尼牛顿法的程序框图如图10-9所示。
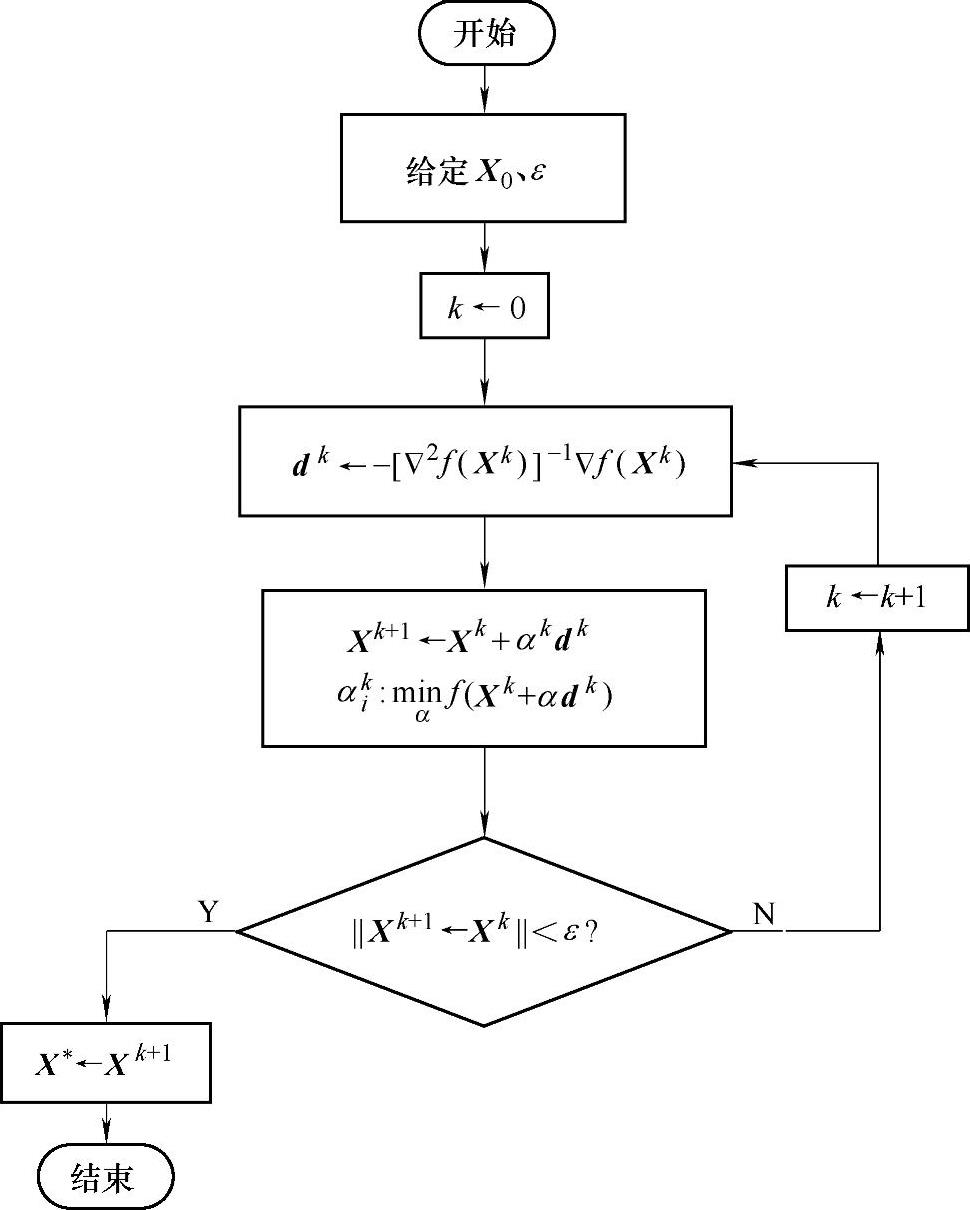
图10-9 阻尼牛顿法的程序框图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。