



S函数是一种动态系统的计算机描述语言,采用特定的调用语法,可实现一组特定的状态方程描述,并使函数和Simulink解法器进行交互。Simulink中的S函数是一种为用户提供的功能强大的对模块库进行扩展的新编程机制。通过编写S函数,用户可以向S函数中添加自己的算法,定制自己的Simulink模块。S函数具有模块化、可重载、可封装、面向对象编程及可视化等特点,可大大提高系统仿真的效率和可靠性,尤其是可实现复杂的动态系统数学描述,且在仿真过程中可对仿真对象进行精确的控制。
变速恒频DFIG风力发电是一个受并网前后发电机运行状况影响的暂态过程,MATLAB中的异步电机模型不能实现空载运行仿真需要,根据这一思路,本文利用S-Function编写DFIG的仿真程序,结合Simulink和SimPowerSystems工具箱,开发了基于S函数的空载并网和发电运行双馈发电机系统模型,合理利用风力机传动链模型,并对整个系统进行了整合。
6.4.1.1 空载运行模型的建立
DFIG并网前后控制策略不同,并网前采用DFIG空载运行模型实行空载并网控制,并网后切换到DFIG发电运行状态并实行最大风能追踪控制,并网前定子电压为输出量,并网后定子电压受控于电网电压又变为了输入量。有关并网型DFIG的两种运行方式的控制方法众多文献作了深入研究,限于研究内容和篇幅不再赘述。
为方便在MATLAB环境下建立空载和发电运行的模型的S函数,将DFIG在空载和发电时的定、转子电压、电流方程表示为状态方程形式。发电机空载运行时,ids=iqs=0,式(2-77)的前两行简化为

令输入向量 ,输出向量
,输出向量 ,状态向量
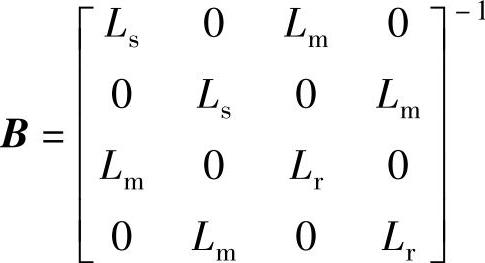
,状态向量 iqr]T,将式(2-77)改写为状态方程形式,得到发电机空载运行时的状态方程描述数学模型为
iqr]T,将式(2-77)改写为状态方程形式,得到发电机空载运行时的状态方程描述数学模型为

其中 ,
, ,
, ,
,
根据上式,在MATLAB/Simulink集成开发环境下编写DFIG空载运行S函数,结合空载并网控制算法可建立交流励磁VSCF DFIG空载运行仿真模型,空载并网系统模型如图6-10所示。在实际编程时,为了计算方便,可将ω1和ωs扩展到输入端,将状态变量x增广到输出端,这样DFIG空载运行S函数就变成了如图的四输入四输出系统。
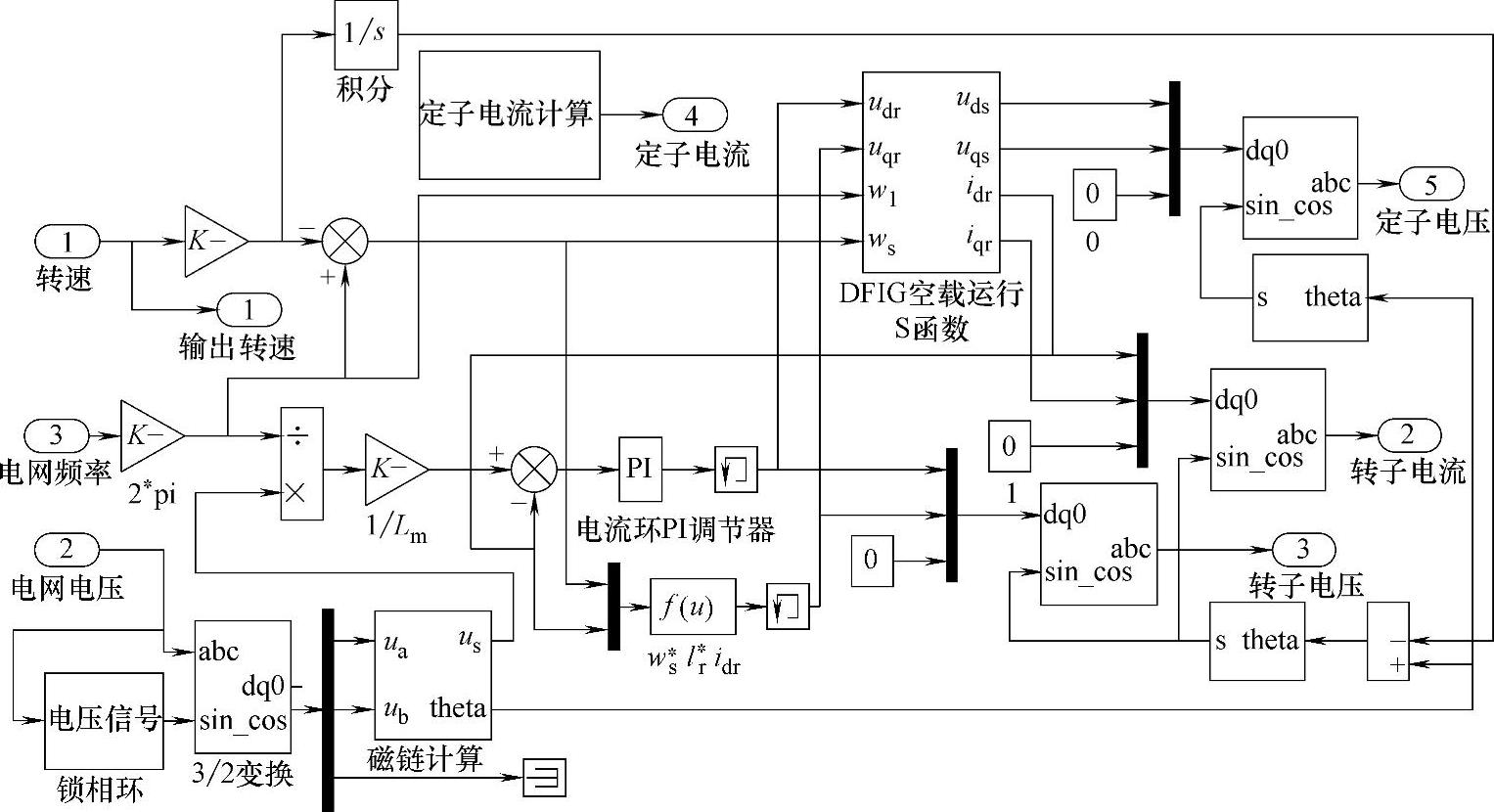
图6-10 空载并网运行系统仿真模型
6.4.1.2 发电运行模型的建立(https://www.xing528.com)
同理,将发电运行状态下定、转子电压与电流的关系改写为状态方程形式,发电运行模型的初始运行条件需要由空载运行模型经状态转移导入,转移状态向量为 。在实际编写S函数时,可将DFIG发电运行模型分解为两部分,第一部分处理DFIG中的电量,可令输入向量u
。在实际编写S函数时,可将DFIG发电运行模型分解为两部分,第一部分处理DFIG中的电量,可令输入向量u
 ,输出向量等于状态向量,即
,输出向量等于状态向量,即 ,得到状态方程描述的发电运行时有关电量的数学模型为
,得到状态方程描述的发电运行时有关电量的数学模型为

式中,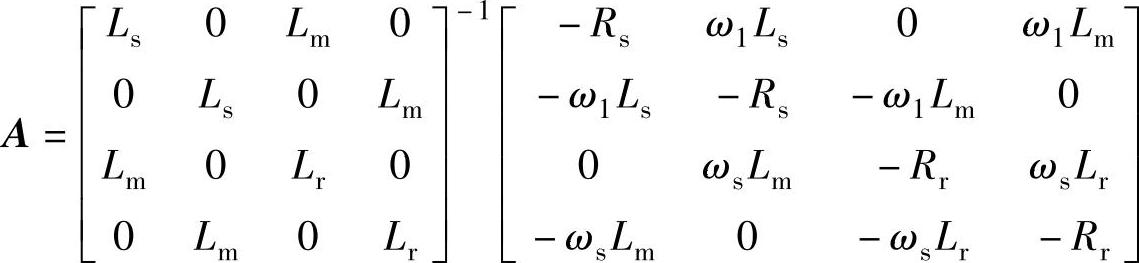 ,
, ,C=[1 1 1 1],D=0;第二部分处理机械转矩量,可令输入向量
,C=[1 1 1 1],D=0;第二部分处理机械转矩量,可令输入向量 ,状态向量等于输出向量,x=y=ωm,在本书中
,状态向量等于输出向量,x=y=ωm,在本书中 ,应用方程(2-78)和方程(2-79)即可编写其S函数。
,应用方程(2-78)和方程(2-79)即可编写其S函数。
根据以上分析,编写DFIG发电运行的两个S函数,结合DFIG发电运行时的控制算法并封装风机模型可建立交流励磁VSCF DFIG发电运行仿真模型,发电运行系统模型如图6-11所示。
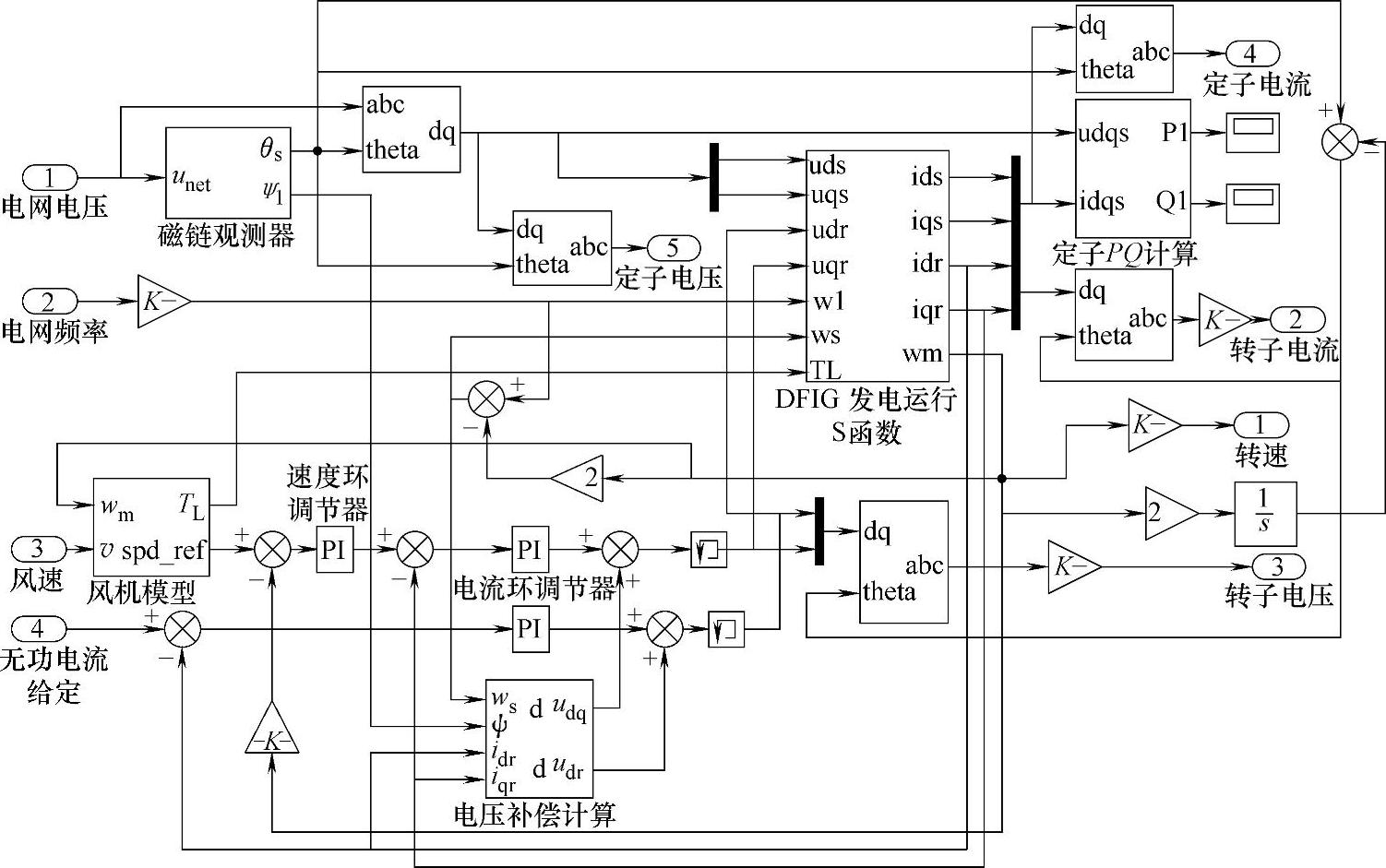
图6-11 发电运行系统模型
6.4.1.3 交流励磁VSCF DFIG风力发电系统建模
在基于DFIG状态方程编写三个S函数并结合两种运行工况建立各自的仿真模型的基础上,进行了单独的空载运行和发电运行模式仿真研究,进行PI调节器的参数优化设计,并根据S函数对DFIG的精确控制修正了三个S函数状态向量初始值。然后将并网运行和发电运行两个子系统进行模块封装处理,并分别进行使能设定,使其使能信号互反,从而实现系统分时工作,且两个子系统不能同时运行。在定子电压与电网电压频率、相位一致的前提下,根据电网电压与定子电压的差值进行交流励磁变速恒频DFIG风力发电系统运行模式判断,本文最初仿真设定为5V,差值大于5V时进行空载运行,小于5V时进行发电运行,整合后的系统仿真图如图6-12所示。整个系统采用逐级封装模块化结构设计,利用两个使能子系统将交流励磁变速恒频双馈发电机风力发电系统分成两个子系统,其中一个是空载运行和空载并网控制构成的并网子系统,另一个是发电运行和最大风能追踪控制构成的发电子系统。两个子系统的“使能信号”具有相反的逻辑关系,受并网运行模式判断信号统一控制,保证了同一时间只能有一个子系统工作。为了和理论分析作更好地对比,本书采用时间设定来代替电压差值的运行模式判断。
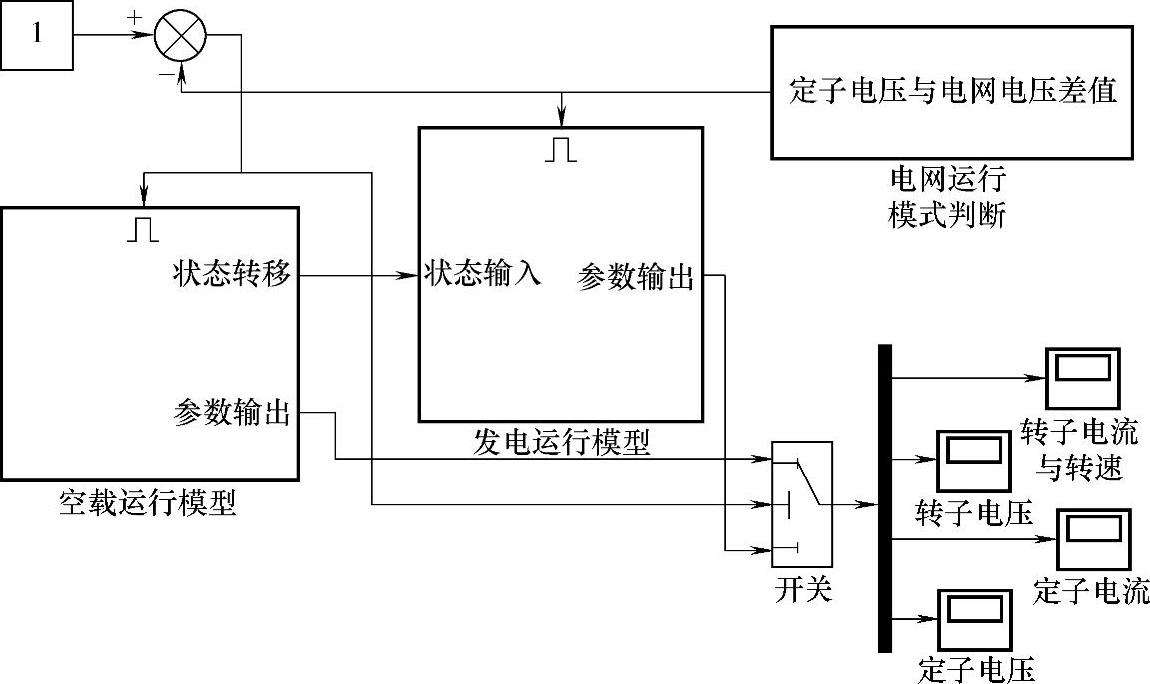
图6-12 基于S函数的交流励磁变速恒频双馈发电机风力发电系统仿真模型
此外,在MATLAB/Simulink集成开发环境下,利用Simpowersystems工具箱开发了基于模块化的DFIG风电系统器件模型,其仿真模型如图6-13所示。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。