



网侧PWM变换器在采用电网电压定向矢量控制方式时需要检测电网电压、输入电流和直流母线电压,如果采用负载电流前馈,则还需要检测直流侧负载电流,众多传感器及其信号处理电路会使结构更复杂和成本更高。直流母线电压传感器用于保证直流电压的稳定,交流电流传感器提供电流反馈信号,实现过电流保护,两者一般不能省去。无电网电压传感器控制方式应运而生,其主要实现方案分为直接功率控制(DPC)和矢量控制(VOC)。与交流调速中的直接转矩控制(DTC)相似,网侧PWM变换器的DPC存在着开关频率不稳定、需要高速模/数转换器等缺点,所以应用最广泛的仍然是矢量控制。
在电网电压定向的矢量控制系统中,电网电压的主要作用是提供同步旋转坐标变换所需要的角度信号,所以无电网电压传感器矢量控制中的关键是利用有关检测量观测出坐标系统的空间位置角度。实现这一目标有三种思路:估计电网电压获得角度信号、直接估计电网电压的角度和估计虚拟电网磁链得到角度信号。虚拟电网磁链信号对测量的干扰有良好抑制作用,所以基于虚拟电网磁链定向的无电网电压传感器矢量控制更有实用价值。
5.2.2.1 虚拟电网磁链的引入
图5-4a是三相电压型PWM整流器的主电路,其中ua、ub和uc分别是三相电网电压,L、R是进线电抗器的电感与电阻,Vdc是直流母线电压。图5-4b是一台由三相变频器供电的三相交流电动机,其中ea、eb、ec分别是电机三相定子绕组的感应电动势,Lσ、R分别是定子绕组的漏感与电阻。比较两图可以发现二者存在着一些相似处。PWM整流器中的电网电压相当于交流电动机的气隙磁场在定子绕组中产生的感应电动势,电抗器的电感和电阻分别相当于电动机的定子绕组的漏感和电阻。在三相交流电动机的矢量控制中,普遍采用磁链作为矢量控制中的定向矢量。利用定子电流和变频器的开关信号构成多种观测磁链的方法。由此可以想到在PWM整流器中,也可将电网电压看成是一个虚拟的磁链微分量,采用类似于交流电动机磁链观测的方法来观测这个虚拟电网磁链,取代电网电压作为定向矢量,这样就可以省去电网电压传感器。

图5-4 PWM整流器与变频调速交流电动机主电路比较
5.2.2.2 d轴虚拟电网磁链定向下PWM整流器的数学模型
在三相电网电压平衡,忽略进线电抗器和线路电阻的条件下,PWM整流器在αβ坐标系下的电压方程为
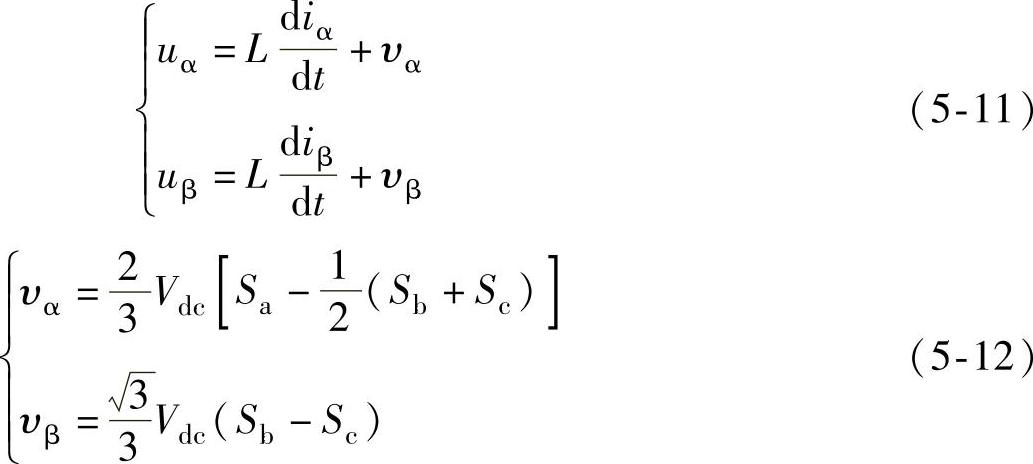
如直接用式(5-11)对电网电压进行估计,也能得到无电压传感器控制。但是,这种观测器用到了电流的微分量,这在实际控制系统中容易放大噪声干扰。将式(5-11)两边同时积分可得
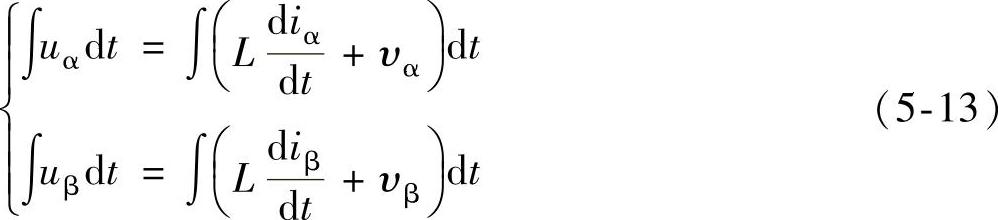
令 可得
可得

令U=uα+juβ、ψ=ψα+jψβ,则电网电压空间矢量U超前虚拟电网磁链矢量ψ为π/2。
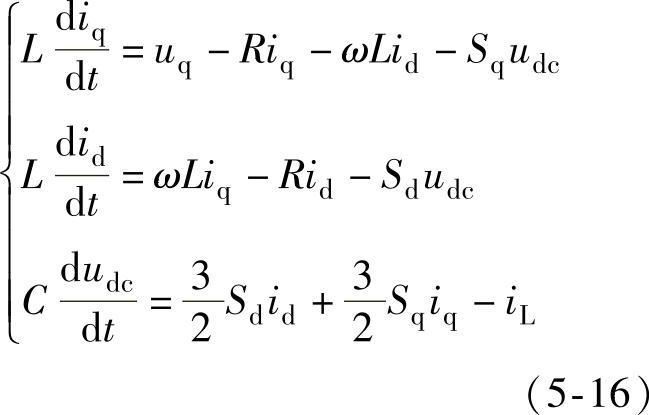
在d轴电网电压矢量定向的同步旋转坐标系下的PWM整流器的数学模型为
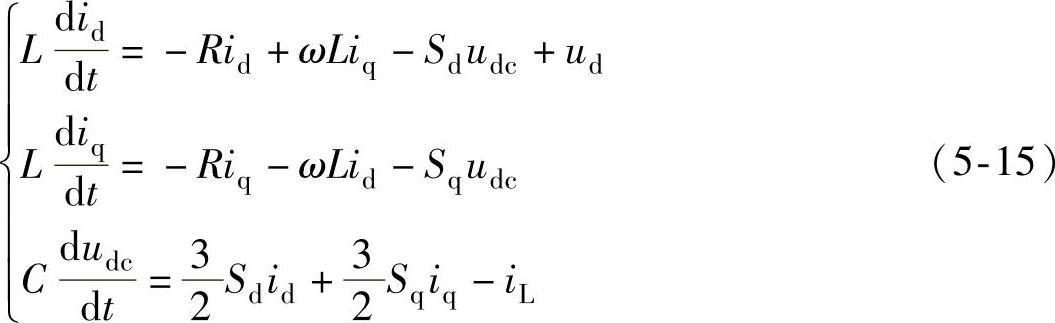
式中,Sd、Sq为dq坐标系中的开关函数;ud为电网电压的d轴分量;id、iq为电流的d、q轴分量。(https://www.xing528.com)
由于电网电压矢量超前虚拟电网磁链矢量π/2,所以由式(5-15)可得d轴虚拟电网磁链定向下PWM整流器的数学模型:
由式(5-14)可得d轴虚拟电网磁链定向下PWM整流器的稳态矢量图,如图5-5所示。
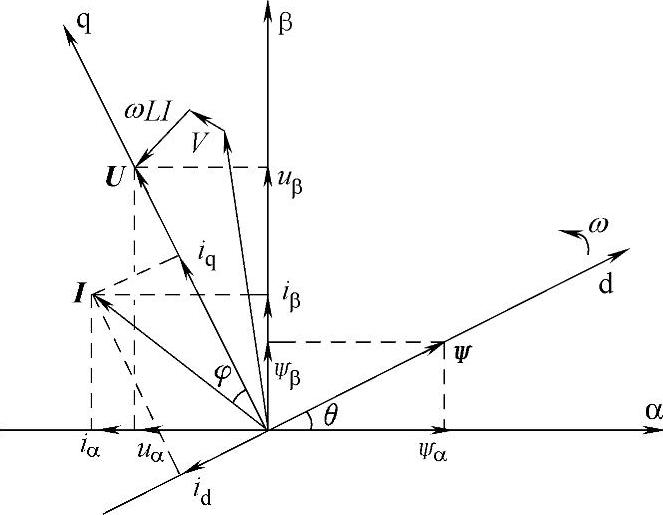
图5-5 d轴虚拟电网磁链定向下PWM整流器的稳态矢量图
5.2.2.3 虚拟电网磁链观测器
虚拟电网磁链定向的问题实际上就是图5-5中θ角的观测问题。由图5-5可知:
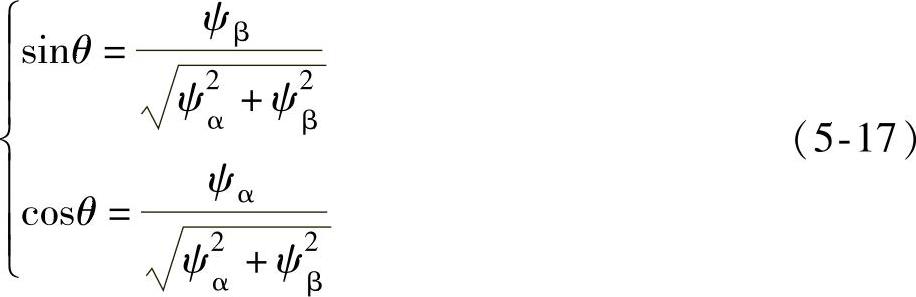
通过式(5-17)就可以把对θ角的观测转化为对虚拟磁链的α、β分量的观测。式(5-14)给出了虚拟电网磁链与已知量的关系,但由于等号右边含有积分项,而积分的初始值未知,所以直接积分得到的结果会含有与积分初始值有关的直流偏置。这样得到的磁链轨迹在αβ坐标系中不是以原点为圆心的圆,而是一个以相应的直流偏置为圆心的圆。磁链观测器的设计,在式(5-14)的基础上构造PWM整流器开环虚拟电网磁链观测器,如图5-6所示。这里用一个低通滤波器取代纯积分器,实际上相当于一个纯积分器加上一个一阶高通滤波器,从而达到消除直流偏置的效果。当然,高通滤波器会造成一定的幅值和相位的误差,但只要选择合适的截止频率,误差就能控制在一定范围内,这在工程上是可以忽略不计的。
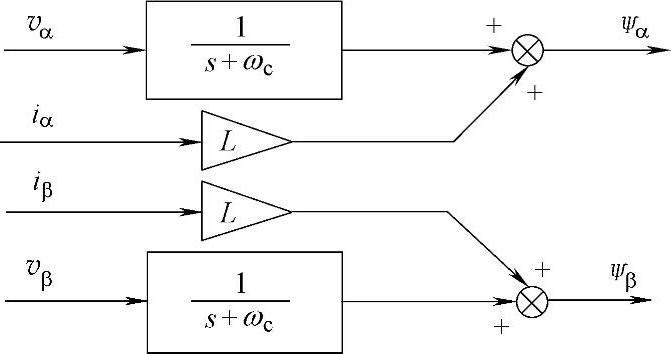
图5-6 虚拟电网磁链观测器
5.2.2.4 d轴虚拟电网磁链定向PWM整流器矢量控制系统

图5-7 d轴虚拟电网磁链定向的无电压传感器SVPWM变换器矢量控制框图
类似于d轴电网电压定向矢量控制,图5-7给出了d轴虚拟电网磁链定向的无电压传感器SVPWM变换器矢量控制框图。由图可知利用两相电流和桥臂的开关信号估计出虚拟磁链的α、β分量,进而得到θ的正弦、余弦值,据此进行坐标变换得到d轴虚拟磁链定向的同步旋转坐标系统。在省去电网电压传感器的情况下实现了矢量控制。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。