



6.3.2.1 控制系统框图
下面将给出并网发电系统的基本控制概念。
图6-12是一个风力机定速运行模式的控制系统框图。该风力发电机配备了直接并网的异步电机,它的工作转速由电网频率、发电机磁极对数和变速器变比决定,并且只能在设计速度的小范围附近波动。控制器负责提供实时功率设定值Pref和转速设定值nref(转速设定值仅用于开机起动过程和超速保护功能)。功率控制器产生桨距角β设定信号,这个信号再进入变桨电机系统。当风速高于风力机的额定风速时,需要调节变桨角来降低功率系数以保证风力机不会超速运行。图6-12中的风轮子系统有风速、风轮转速和桨距角3个输入端;输出端为实时气动转矩。发电机子系统的输入端子为电网频率、电网电压和转子转速;输出端子为电机的气隙转矩。风轮捕获的起动转矩与电机气隙转矩(经传动系放大后)之差为惯性转矩,用于加速整个传动系。当风力机运行于稳态工况时,惯性转矩为零。
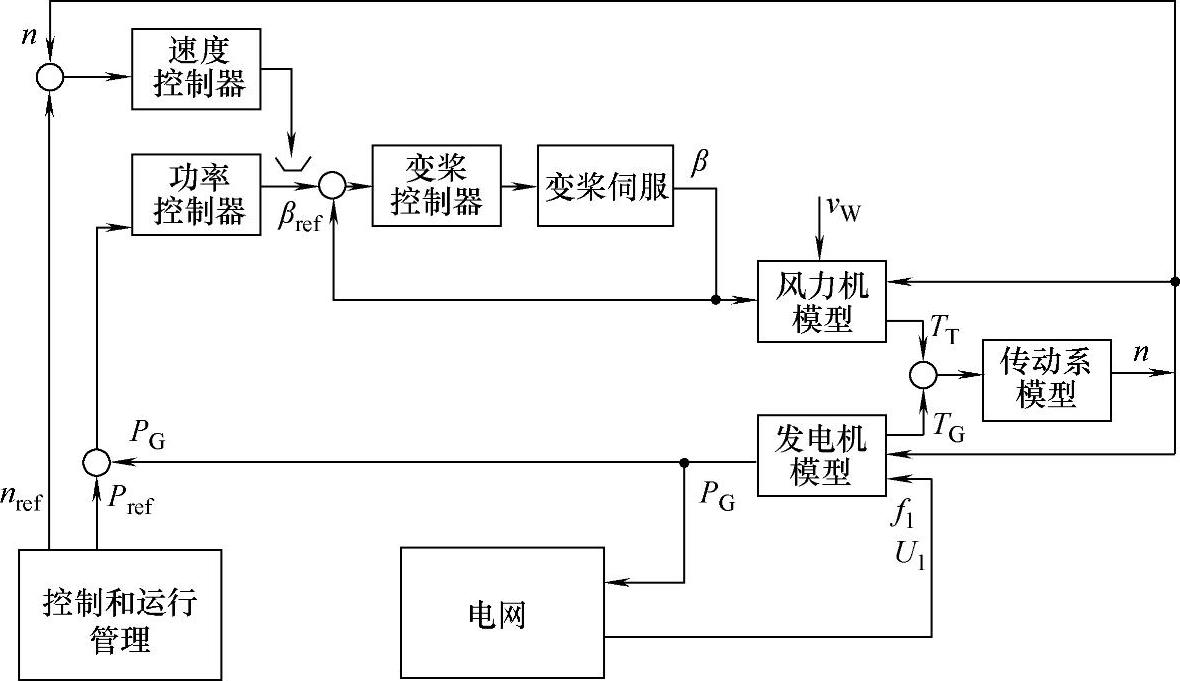
图6-12 风力机定速运行模式的控制系统框图
图6-13给出了使用全馈异步电机的变速风力发电机控制框图,图中的转速控制器1作用于风轮机械系统,用以限制转速和捕获功率;转速控制器2作用于逆变器,用于寻找并提供最优功率系数时的电磁转矩。带逆变器的系统无功功率控制器也是必要的,不过图6-13并没有示出。当然如果风力发电机使用双馈异步电机或者同步电机,那么需要改变控制器的结构来适应新的系统。
如果读者需要了解更详细的风力发电机控制知识,请参阅参考文献[Bian07]。
6.3.2.2 向量控制
向量控制是一种先进的电机控制方法[Quan08]。图6-14给出了一个使用双馈异步发电机的风力发电机向量控制示意图[Mue02]。从发电机端子测量出的电压和电流被用来计算实际有功功率PG和无功功率QG;实际功率与其他控制器确定的设定值PG,set和QG,set的差进入两个比例—积分控制器,结果进入解耦器进行解耦。通过d、q轴变换法,定子和转子的d、q轴电流iRdq和iRdq通过其各相绕组的相电流计算而来,旋转环节的输入信号为转子位置角φr(通过编码器得到)和计算得到的电压向量角φvs。在解耦器中转子电压被直接计算到d、q轴坐标系中成为VRdq。图6-14中的逆变器是带中间直流电路的电压源逆变器,VR提供转子侧的电压,控制器通过PWM方式来调节电网侧电压和电流信号。(https://www.xing528.com)
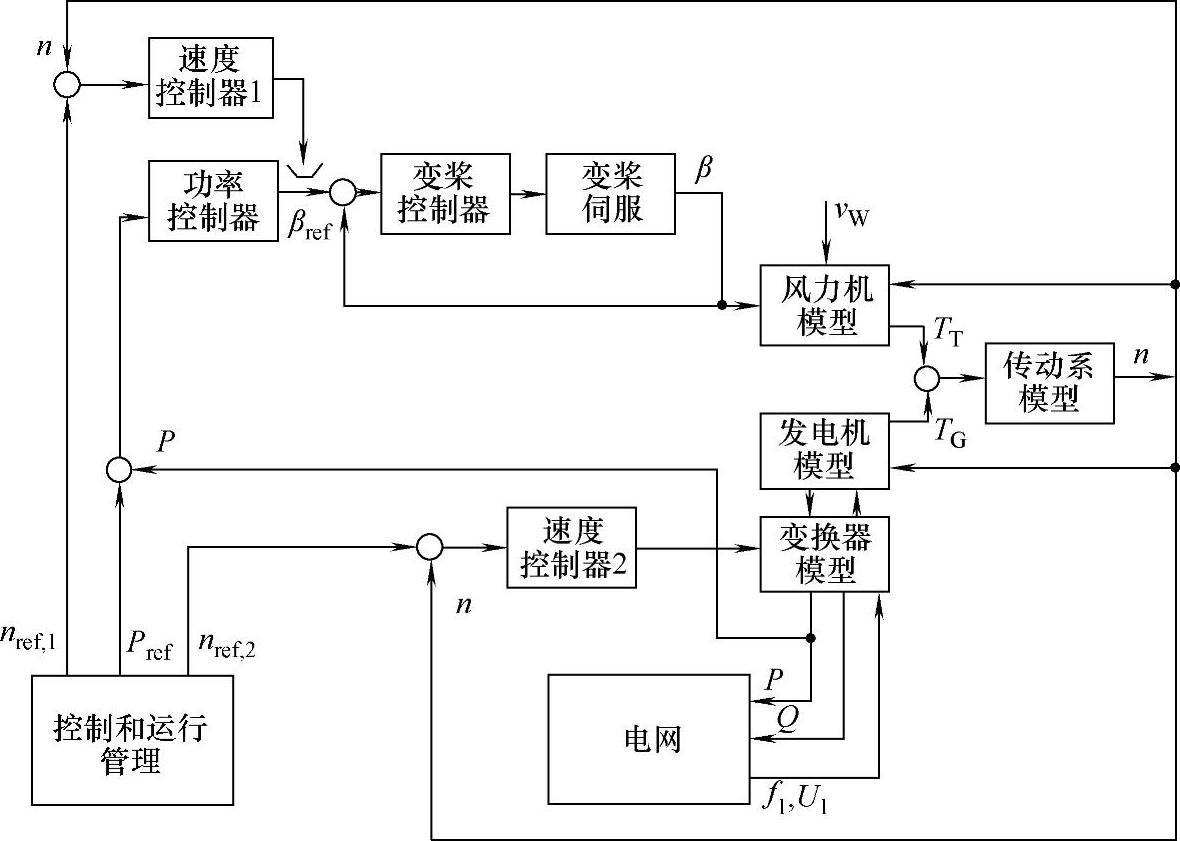
图6-13 风力机变速运行模式的控制系统框图
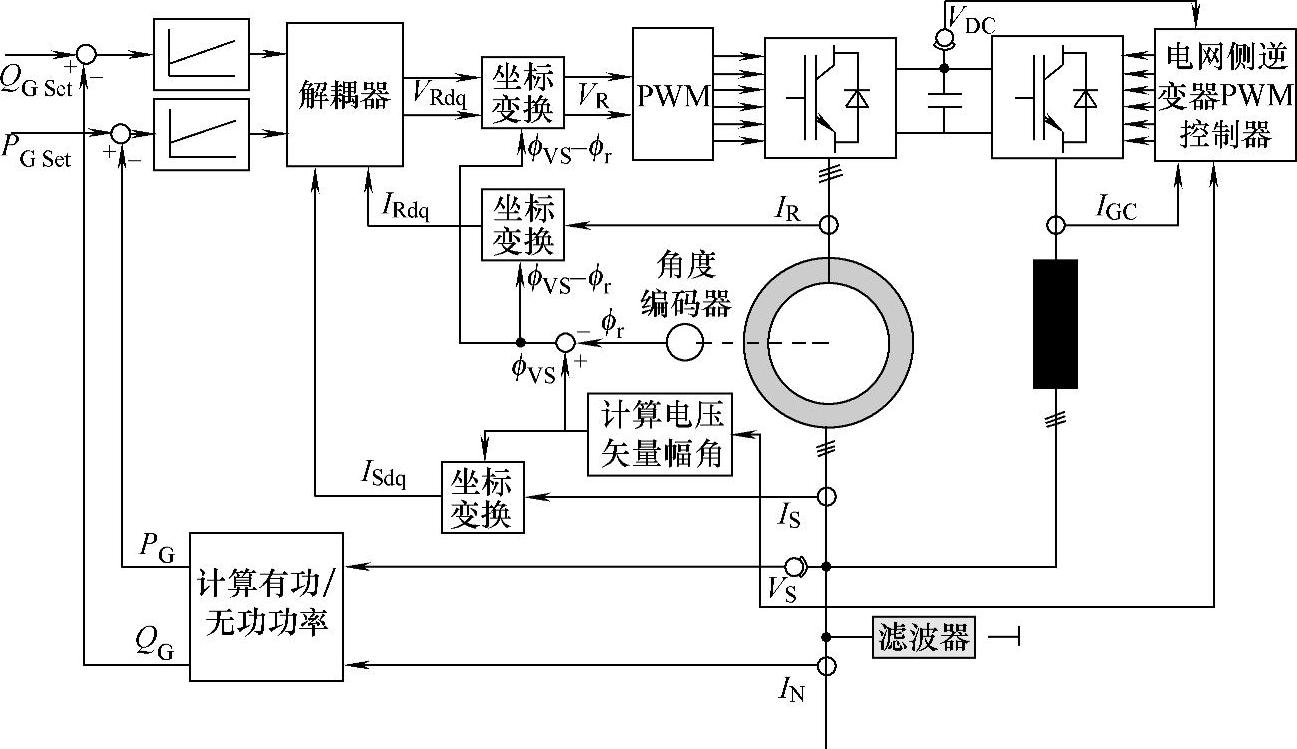
图6-14 使用双馈异步发电机的风力机控制系统示意图
参考文献[Mue02]的作者提供了1.5MW风力发电机的测量波形图,该发电机额定转速为1800r/min,数据采样周期为10min。如图6-15所示,当风速低于额定风速时,桨距角保持恒定,风力机由逆变器控制电动机气隙转矩来调速以保持最优尖速比;当风速高于额定转速时,通过调节桨距角来降低功率系数,限制捕获功率。
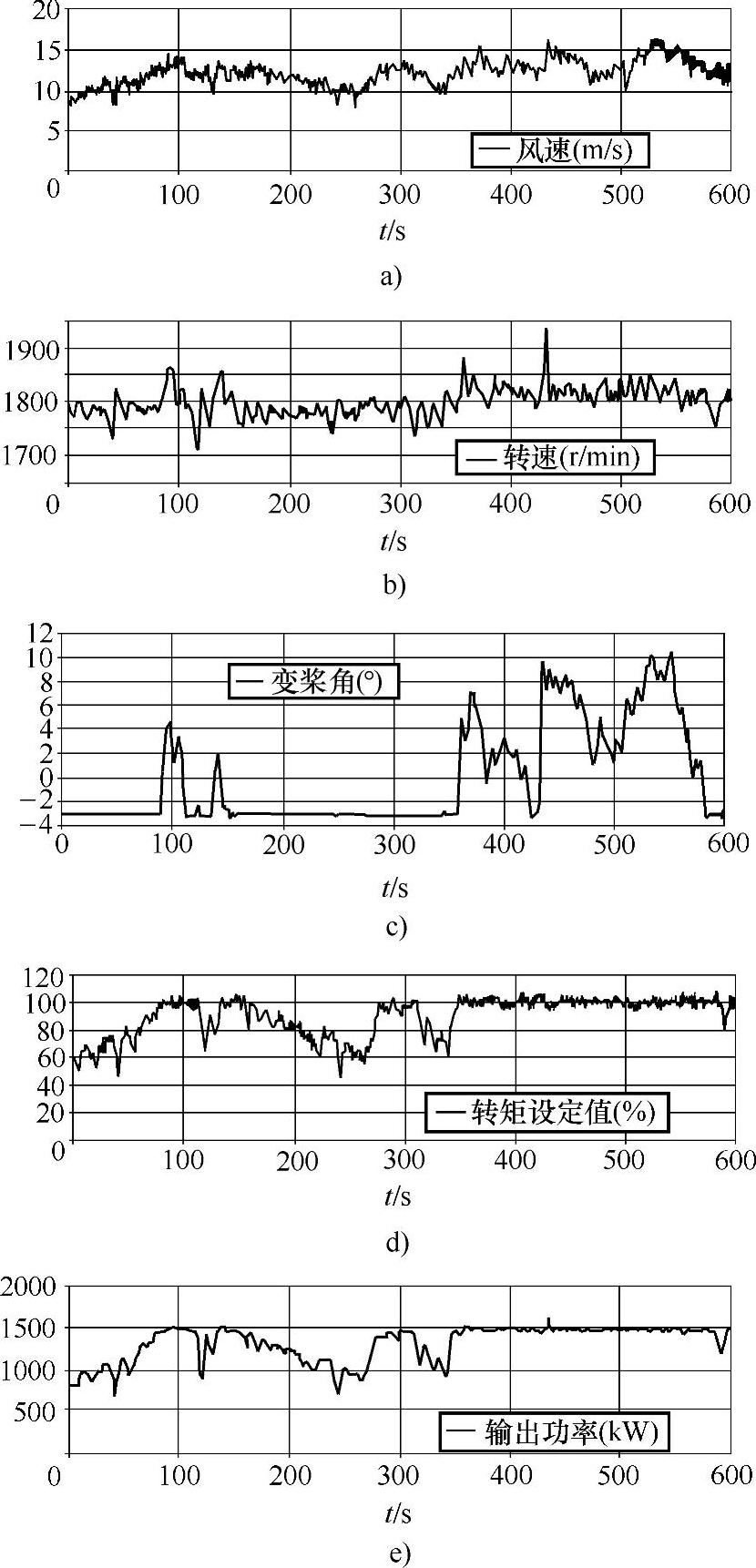
图6-15 在实验风况下的风力机监测波形
除了这些普遍的控制策略外,业界也在探索其他控制方法。参考文献[Sim97]提出了一种变速风力发电机的模糊控制策略,用以优化风力发电机效率,提高性能;同时该机使用笼型异步电机,通过双边PWM逆变器来向电网或者用电器提供电能。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。