



2.4.1.1 变桨系统
通过改变风力机叶片的桨距角来控制风轮捕获的能量功率和轮毂转矩是一种被广泛采用的方法,这个方法减少的是风力机捕获的能量,在高风速条件下不会对风力机设备造成额外的负载。通常变桨系统是通过液压活塞或者电动机系统来驱动的,在大型风力发电机市场中,应用变桨系统的产品是市场主流。
装备了变桨系统的风力机,都具备一个变桨控制器。当风速过高、风力机的转速也随之升高到许用范围之外时,变桨系统将改变叶片桨距角。随着桨距角的增大,功率系数和转矩系数的峰值都会减小,并且峰值也趋向于出现在较小的λ值上。随之出现的还有变大的起动转矩、显著降低的阻力系数等。根据图2-6的风力机数据推算出的变桨风力机性能曲线如图2-11所示。
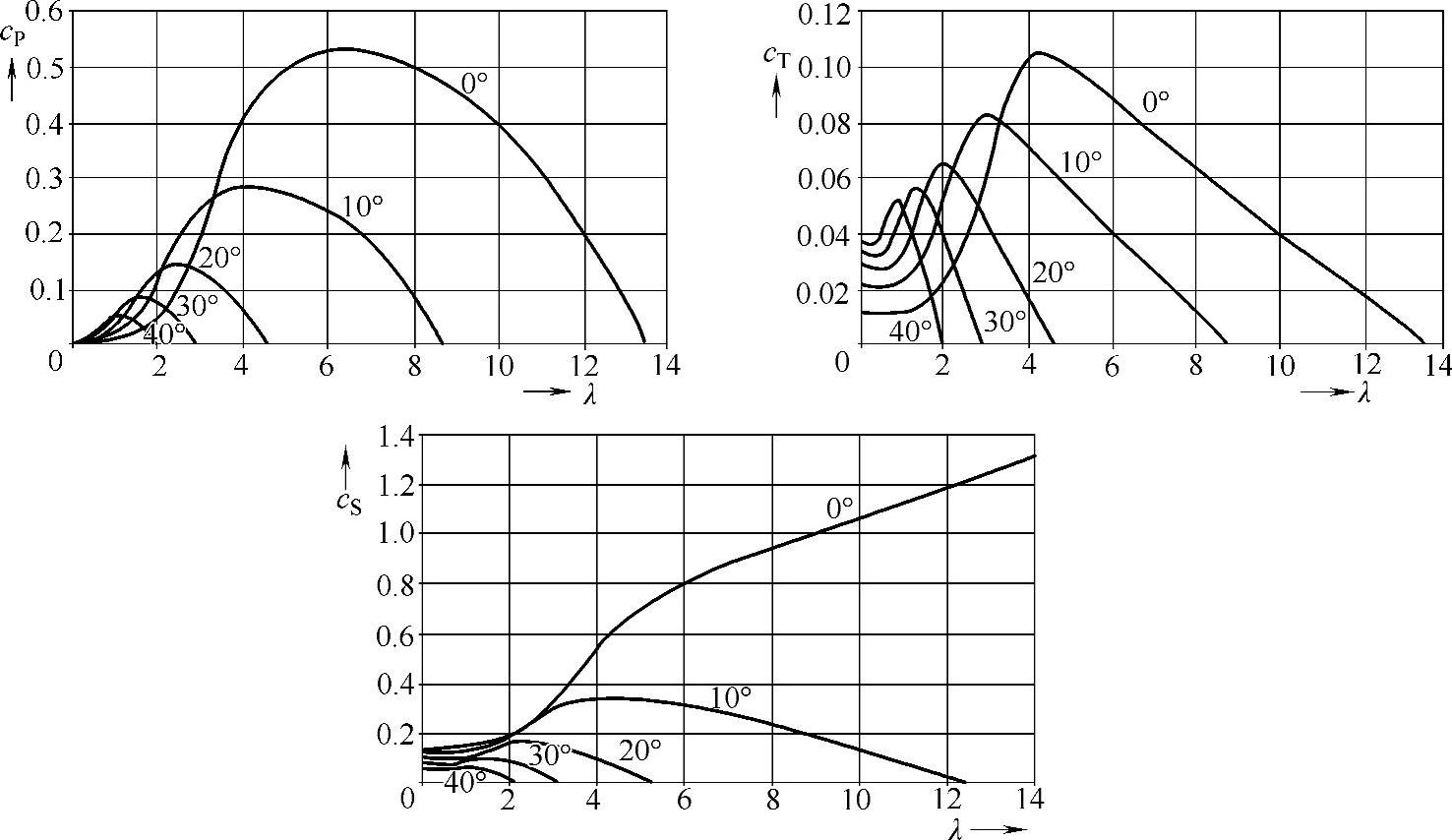
图2-11 不同桨距角时功率、转矩和阻力系数与叶尖转速比关系
2.4.1.2 失速机制
为了保证风力机在高风速下不会过载,当风轮转速超过预设的额定值后,风力机必须限制自己捕获的能量。像Western Mill这种简单的风力机采用的办法是给风轮一个偏航角,让风轮不再正对风向,因而减小了风轮的扫略面积,也就减少了风力机捕获的能量。对于没有变桨装置的定桨风力机来说,失速效应是一种被广泛用来限制捕获能量的机制。图2-12描述了失速效应当中空气由层流转变为湍流,进而损失了升力,因此降低了捕获能量。图2-12中α是攻角,它是气流方向与叶片翼弦平面之间的夹角(见图2-4),ϑ是叶片翼弦平面与风轮平面之间的夹角。
 (https://www.xing528.com)
(https://www.xing528.com)
图2-12 叶片层流/湍流示意图
这种失速调速机制的一个变种叫做主动失速,使用该方法的风力机一旦检测到风轮运行超速,就会自主将叶片变至一个失速位置。图2-13列出了被动失速、主动失速和变桨调节的情形,即在被动失速中叶片下风向产生了大量湍流,在主动失速中叶片自主移向失速区域,也产生了大量湍流,变桨调节系统则尽量避免大范围湍流的产生。

图2-13 被动失速、主动失速和变桨调节
2.4.1.3 其他功率限制手段
千瓦级的小型风力机有时会采用其他手段来限制风轮机捕获能量,如用被动变桨控制或者用被动偏航系统来降低风轮有效扫略面积,进而减少捕获的风能(参见本书5.2节相关内容)。
除去降低风力机捕获能量的办法来限制发电功率外,还可以采用电气制动或者机械制动方法来减少捕获。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。