



一般情况下,机器人视觉检测系统由高精度工业机器人、立体视觉传感器(或其他类型的传感器)、测量和控制软件、测量计算机及图像处理系统等部分构成[2,3]。本系统针对江淮轿车厂成车车身的关键尺寸如挡风玻璃窗尺寸、底盘安装定位孔、车门棱边、发动机舱等关键部位尺寸进行测量。本系统由两台对角布置的KUKA机器人及安装在末端的视觉传感器构成,工业机器人作为立体视觉传感器的运动载体,不仅极大地拓展了视觉传感器的工作空间,还保留了视觉检测技术非接触、快速的特点。通过控制机器人在空间的位姿变换,视觉传感器能够依次到达空间指定测量位置采集空间特征点的图像信息。并通过数据处理获得该点的三维坐标数据。
机器人视觉检测系统的工作过程是:白车身在滑撬上运动到检测工作站停下并精确定位,主线控制器给检测站控制器发“到位”信号→站控制器给机器人发“车型”及“启动”信号→机器人接到信号后开始工作,机器人在每个测量点向测量控制器发“测量请求”和“测点ID”信号,等待测量控制器发回的“测量完成信号”→测量系统接到信号后开始测量并记录数据,然后传递到测量分析软件进行处理,测量结束后向机器人发“测量完成”信号→机器人收到“测量完成信号”后开始向下一测量点运动,由此完成全部待测点的测量。
系统预先对机器人的运动轨迹进行规划,使每个被测量特征点处于视觉传感器的最佳视场范围内,然后逐点测量空间特征点三维位置。安装于机器人关节末端的立体视觉传感器对工件被测特征点进行三维测量时能够获取的仅仅是该点在视觉传感器坐标系下的坐标值,而不是被测量点在工件坐标系下的坐标值。然而,利用通用测量机器人进行空间三维位置测量的目的是获取被测量特征点在工件坐标系下的三维坐标值,这就必须建立视觉传感器坐标系与工件坐标系的坐标变换关系[4]。图1是坐标系示意图。
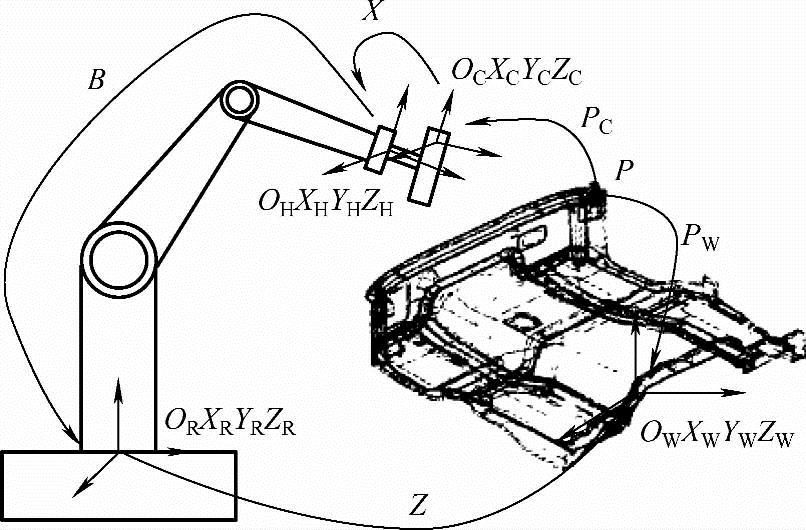
图1 测量机器人系统坐标系示意图 Fig.1 Coordinate system of the measurement robot(https://www.xing528.com)
系统中存在4个坐标系,安装机器人时确定的基坐标系ORXRYRZR和机器人末端关节坐标系OHXHYHZH,车身在生产线上由定位系统确定的车身坐标OWXWYWZW和视觉传感器测量坐标系OCXCYCZC。测量结果即确定被测点P在车身坐标系OWXWYWZW下的坐标PW。从图1可以看出
PW=ZBXPC (1)
式中,PC为被测点P在视觉传感器测量坐标系下的坐标值;X为机器人手眼关系,即机器人末端关节坐标系与视觉传感器测量坐标系之间的变换关系;B为机器人末端关节坐标系与机器人基坐标系之间的坐标变换关系,它可以由机器人的正向运动学模型及各个关节变量值获得;Z为机器人基坐标系与白车身坐标系之间的位置变换关系。式(1)中,X和Z为未知量,由于视觉传感器与机器人末端关节刚性连接,测量过程中两者相对位置不变,所以X在测量中恒定。同样,机器人基坐标系相对于白车身坐标系的位置关系也是不变的,即Z值恒定。因此,X和Z都可以在测量前计算出来。只要得到P点在视觉传感器测量坐标系下的坐标PC,根据式(1),可计算出P点在车身坐标系下的坐标PW。然而,在使用式(1)的过程中,如果使用机器人的理论运动学模型B进行解算,由于机器人存在很大的绝对定位误差,将导致最后的测量结果错误。为此,这里采用整体标定的方案。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。