



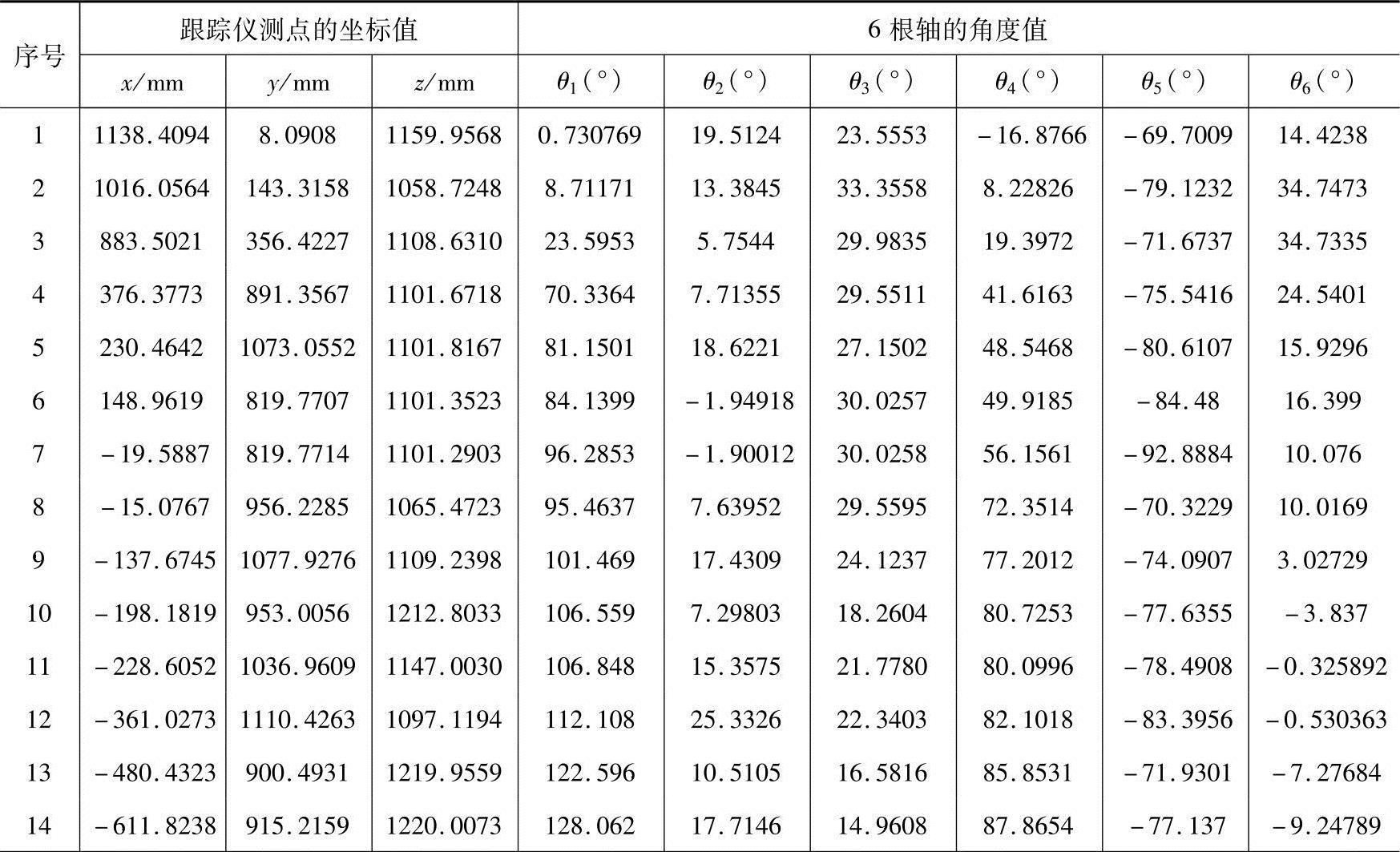
试验所用主要设备如图5所示,在标定试验过程中,测量了空间的20个点,目标点为末端凸缘盘的中心点,并通过串口通信取得机器人6根轴的角度值,如表2所示。用其中的后15个点建立矩阵方程,另外的前5个点来验证结果。
将6根轴的角度值带入式(16)即可求得末端凸缘盘中心点在机器人基坐标系下的理论位置,将其与表2中的用跟踪仪测量的坐标值相减,即可求得机器人的位置偏差ΔP(相当于式(7)中的b)。将角度值带入式(8)可以求得系数矩阵A,从而根据式(11)求得机器人连杆参数修正值。
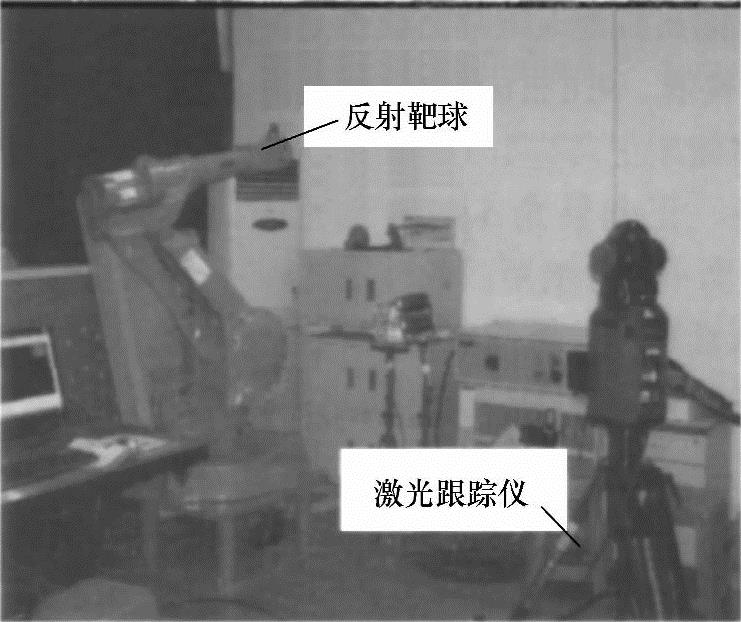
图5 试验设备现场
用Matlab进行解算,解算结果为
ΔX=(a1a2a3a4a5a6d1d2d3d4d5d6)
=(99.395 706.064 133.634 0.187 -0.312 0.062 615.507-0.099 -0.099 756.071 -0.096 84.233)
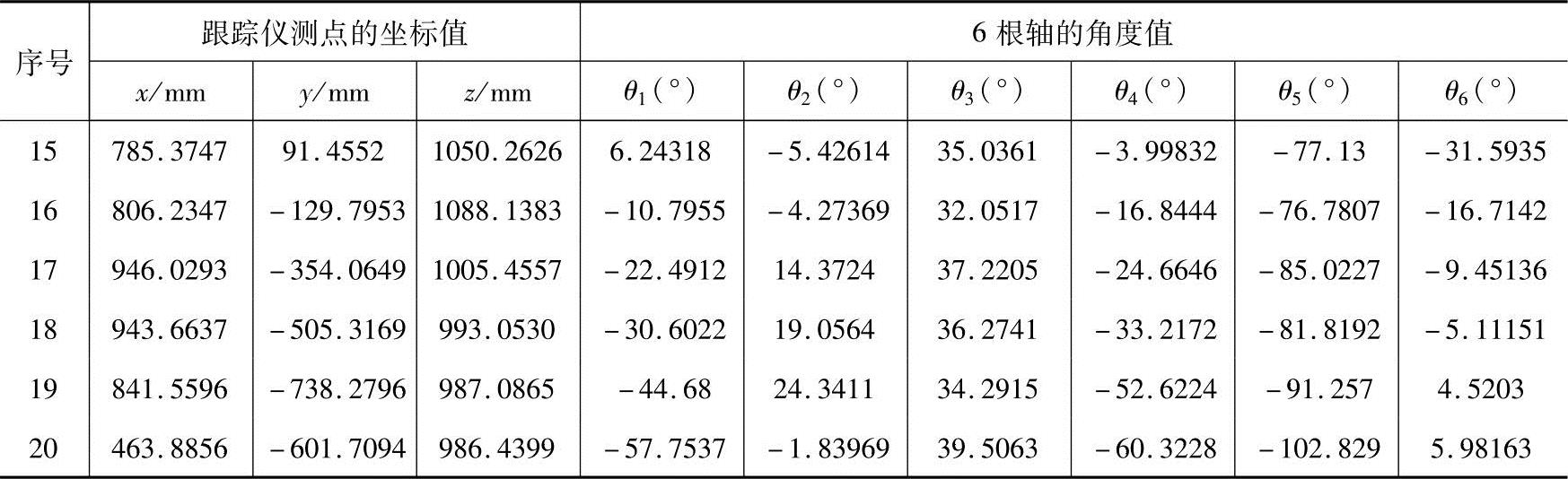
表2 跟踪仪测量值和机器人角度值
(续)(https://www.xing528.com)
对于前5个点,修正前后的末端凸缘盘中心点在机器人基坐标系下的坐标值如表3所示。将表2、表3中的跟踪仪测点的前5组数据对比,可得到修正前后的误差,如表4、表5所示。
表3 修正前后中心点在机器人基坐标系下坐标数据
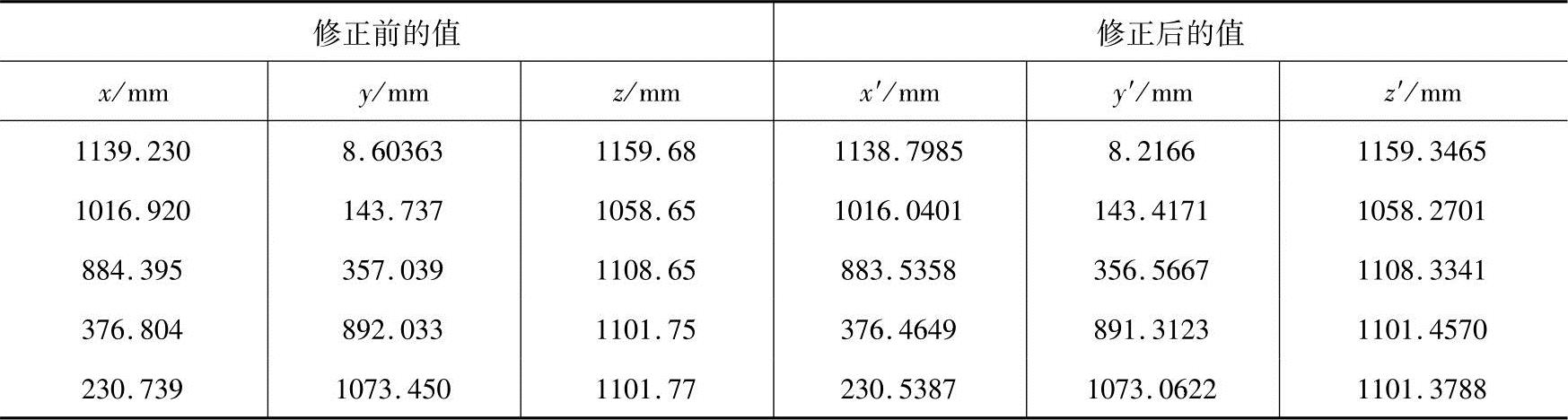
表4 修正前跟踪仪器点误差
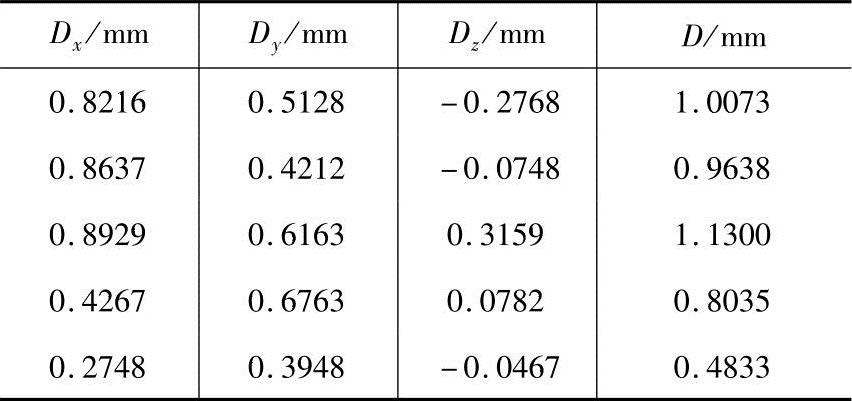
表5 修正后跟踪仪器点误差
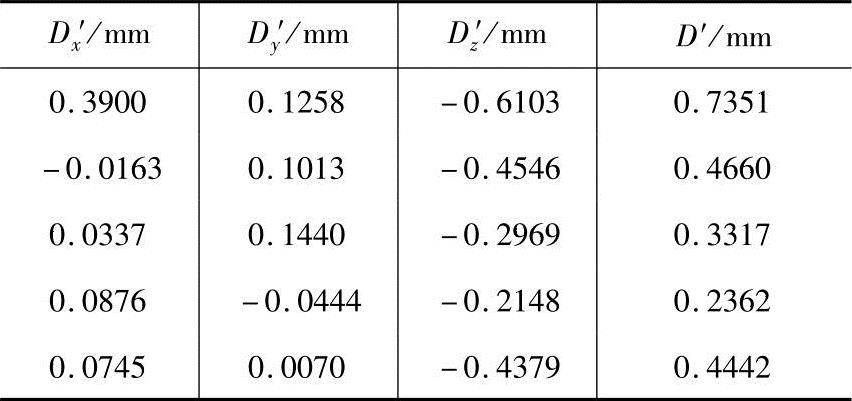
可以看出标定后,机器人的定位精度得到了明显的改善,标定前定位精度D的平均误差 、标准方差S2=0.2495;修正后,定位精度D的平均误差
、标准方差S2=0.2495;修正后,定位精度D的平均误差 ,标准方差S2=0.1878,精度提高了一倍。而且通过表2~表5中数据可以看出x、y、z的单方向的跳动值(最大最小值的差)由原来的0.6181、0.2815、0.5927减小为0.4063、0.1884、0.3955。由于在采集数据的过程中,激光跟踪仪需要从反射靶球接受返回的激光。机器人在z方向的运动范围受到限制,因而训练数据的z方向范围空间太小,训练数据的样本空间遍历性不够,导致修正后表5中Dz′列数据有所增加。
,标准方差S2=0.1878,精度提高了一倍。而且通过表2~表5中数据可以看出x、y、z的单方向的跳动值(最大最小值的差)由原来的0.6181、0.2815、0.5927减小为0.4063、0.1884、0.3955。由于在采集数据的过程中,激光跟踪仪需要从反射靶球接受返回的激光。机器人在z方向的运动范围受到限制,因而训练数据的z方向范围空间太小,训练数据的样本空间遍历性不够,导致修正后表5中Dz′列数据有所增加。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。