



结构光传感器是最早得到应用的视觉传感器,技术发展成熟。图2是一典型的结构光传感器——光条结构光传感器。
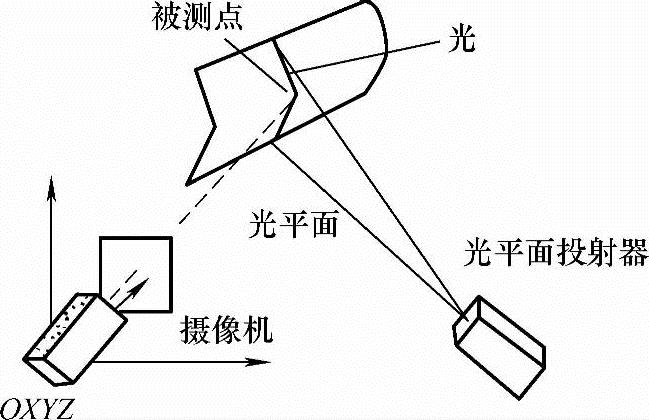
图2 光条结构光传感器原理
传感器包括光平面投射器和摄像机两部分,基于三角法测量原理。测量时,光平面投射器投射出光平面,光平面和被测物体表面相交形成光条,光条图像由摄像机经图像采集卡进入计算机,经计算机处理得到的图像,提取被测点对应的图像特征点在像面上的坐标,由摄像机模型及三角法测量原理可以得到被测点的三维坐标。
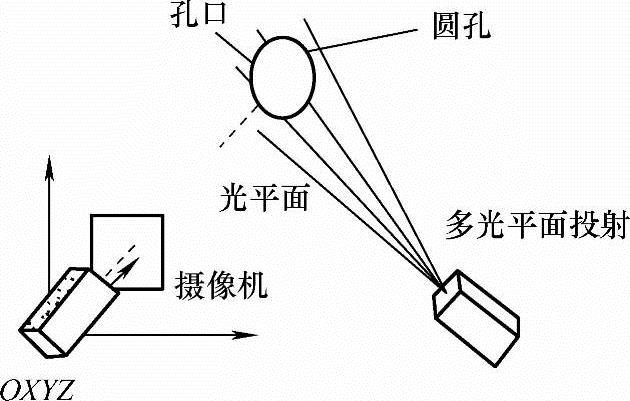
通常地,汽车白车身上的被测点可归纳成棱线点和一般特征点两类。棱线是车身上不同块面之间的交线,它的制造装配精度对汽车的空气动力学性能有影响,检测棱线是通过检测其上点的位置完成的,车身上一般特征点是指控制整车装配精度的重要安装定位孔(如发动机安装孔等)及可以表征车身制造精度的一些标准点,棱线点和一般特征点相对视觉传感器而言是两种不同类型的被测点,需要光条结构光传感器和光栅结构光传感器。光条结构光传感器原理如图2所示,用于测量棱线点,光栅结构光传感器原理如图3所示,相当于具有多个光平面的光条传感器,一次测量可以同时得到多个不同空间位置上点的三维坐标(如测量圆孔时,可得到圆周上多个点的坐标),由此计算出被测特征点(如圆孔的孔)的三维坐标。
上述两种传感器已成功地应用在较早的车身三维尺寸视觉检测系统中,随着应用的逐步深入,这两种传感器暴露出了明显的缺陷。
1)传感器校准困难,精度低。传感器在使用前必须标定光平面和摄像机之间的空间关系,目前的方法是使用细丝散射结合经纬仪的方法,这种方法受散射光点无法精确瞄准的影响,校准精度难以提高,同时由于经纬仪的使用,也大大增加了传感器校准的工作量。
 (https://www.xing528.com)
(https://www.xing528.com)
图3 光栅结构光传感器原理
2)两种传感器结构及校准方法的不一致,造成整个检测系统组建及维护困难。在实际的检测系统中,每种传感器的数量随着车型的不同而变化,传感器结构及校准方法的不同会严重影响系统的组建效率和维护成本。

图4 基于立体视觉的传感器统一结构
最新研制的视觉传感器采用了基于立体视觉检测原理的统一结构,克服了两种传感器结构及校准方法不统一的缺点,传感器原理如图4所示。
传感器采用立体视觉检测原理,由双摄像机和结构光投射器组成,被测点的空间坐标由两个摄像机得到的图像中该点对应的立体视差决定,结构光投射器的不同形式决定了传感器的不同类型。采用光条结构光投射器,相当于光条结构光传感器;采用光栅结构光投射器,相当于光栅结构光传感器,此外,还可以通过设计特殊的投射器,进一步扩展视觉传感器的应用范围。
基于立体视觉统一结构的传感器具有突出的优点,不同类型传感器的结构和校准方法完全一致,可以采用基于靶标的精确校准技术实现传感器的高精度校准,传感器适应性优良,对于不同类型的被测点,只需变更传感器中的光投射器即可。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。