



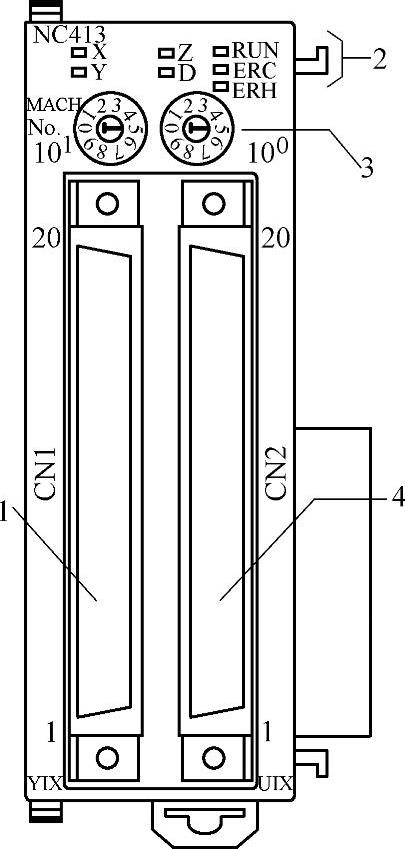
图5-76 CJ1W-NC413外观
1—X/Y轴连接器连接到步进电动机驱动器或者伺服驱动器(控制两个轴) 2—LED指示灯显示PCU的操作状态 3—单元数设置开关设置PCU的单元号 4—Z/U轴连接器连接到步进电动机驱动器或者伺服驱动器(控制两个轴)
OMRON位置控制单元与大、中型PLC配套使用。如中型PLC用的,有C200H的NC112、NC211、NC113、NC213、NC413、C200HWNC413/213/113及CJ1W的NC113、213、413、133、233、433,等等。这些单元接受PLC指令,或自身存储的数据,向电动机驱动器输出脉冲信号,分别进行单轴控制、双轴控制或四轴的定位控制。以下主要针对CJ1机的情况作简要介绍。
1.结构
位置控制单元也称P(POSITION)C(CONTROL)U(U- NITE)。图5-76所示为CJ1W-NC413的外观图。
上述所有位控单元的基本原理如图5-77所示。
从图5-77可知,位置控制单元有自己的微处理器(MPU)、内存、总线。同时,还有脉冲发生器及I/O接口。
它一方面通过PLC总线接口,与PLC的CPU相连;另一方面又通过I/O连接器输出脉冲及接受少量的开关量输入(图中外部输入)。这样,既可接受PLC的有关控制命令,并存于自身的内存中,又可接受开关量输入信号,如极限位置信号、原点信号等,以便自身的CPU进行处理,并依处理结果控制脉冲发生器输出脉冲。同时,在PLCI/O刷新时,还反馈一些信息给PLC,及接收来自PLC的新命令。
它的脉冲输出可有两种形式:一为脉冲信号加方向信号,如图5-78a所示;另一为两路脉冲信号,即正向(增)脉冲及反向(减)脉冲,如图5-78b所示。各有其信号线。伺服系统为开环时用前者,而闭环、半闭环时用后者。到底使用什么样的脉冲信号,可由单元的DIP开关设置确定。
图5-77画了两种伺服系统,其实用其中的一个就可以了。而且也只能用一个。从图5-77可知,开环时,其后要接环形分配器,把连续的单相脉冲信号分成多相,并依方向信号确定其相序,以控制电动机转动方向。多相脉冲信号经功率放大,再去驱动步进电动机。步进电动机的运动经机械传动,再带动部件运动。开环系统较简单,但功率不大。
图5-77还示出闭环系统。它有一个偏差计数器。这计数器既接收来自位控单元的正向与反向脉冲,又接收来安在运动部件上的旋转编码器的反馈脉冲。这几股脉冲综合后,由偏差计数器产生相应输出。这输出放大后,再去驱动伺服电动机。显然,只要有偏差,即给定脉冲不等于反馈脉冲,伺服电动机就有速度。直到无偏差,即达到输出脉冲要求的位置,伺服电动机才停止转动。该图还接了一个速度反馈回路,目的是使部件运动速度平稳,避免振荡。
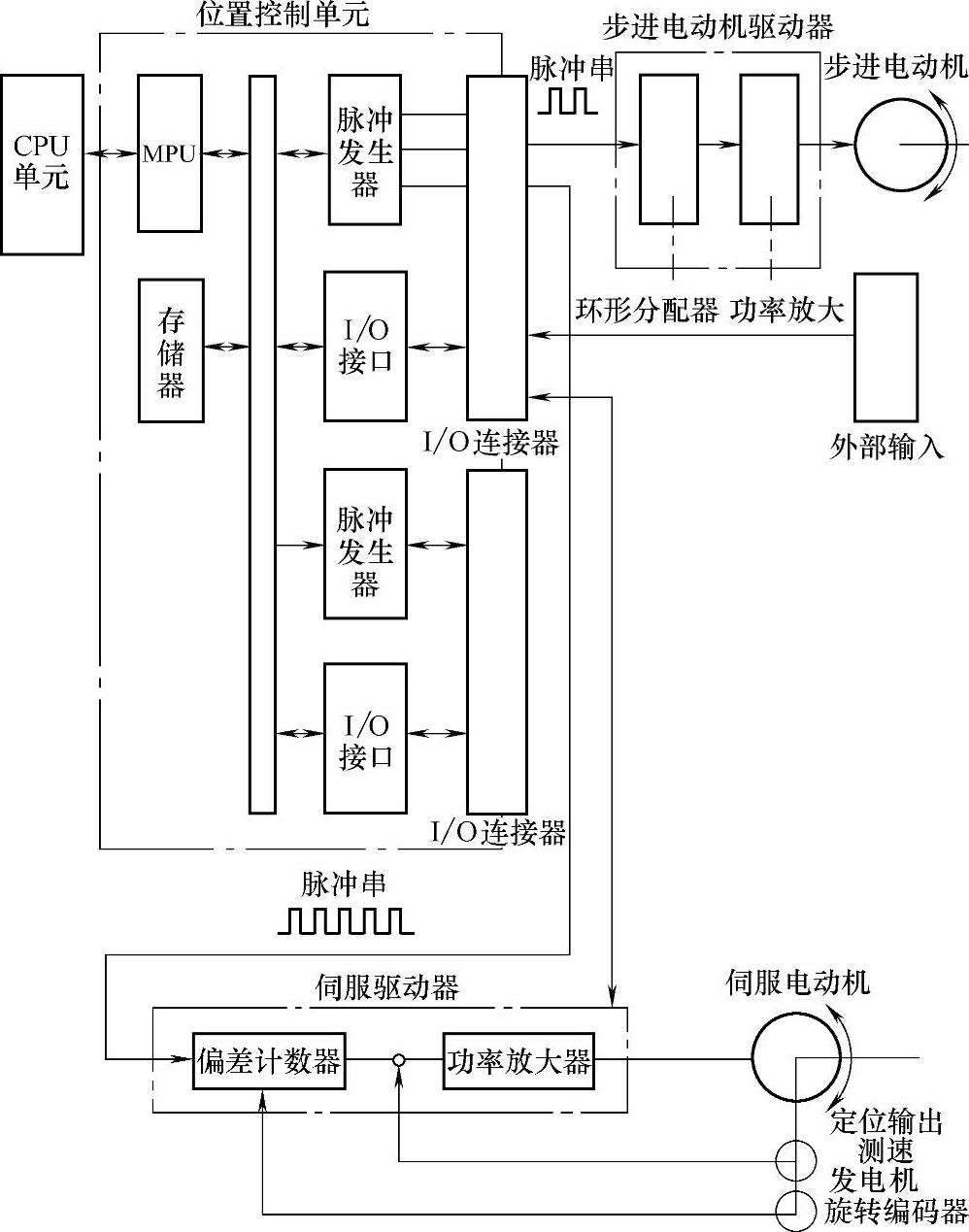
图5-77 单轴的位控模块的功能框图
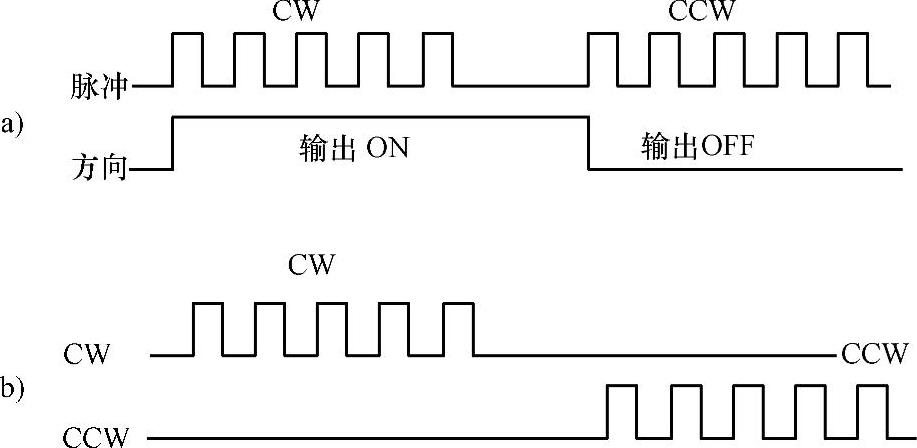
图5-78 两种形式脉冲
a)脉冲信号加方向信号 b)两路脉冲信号

图5-79所示为CJ1W-NC413位控系统配置情况。
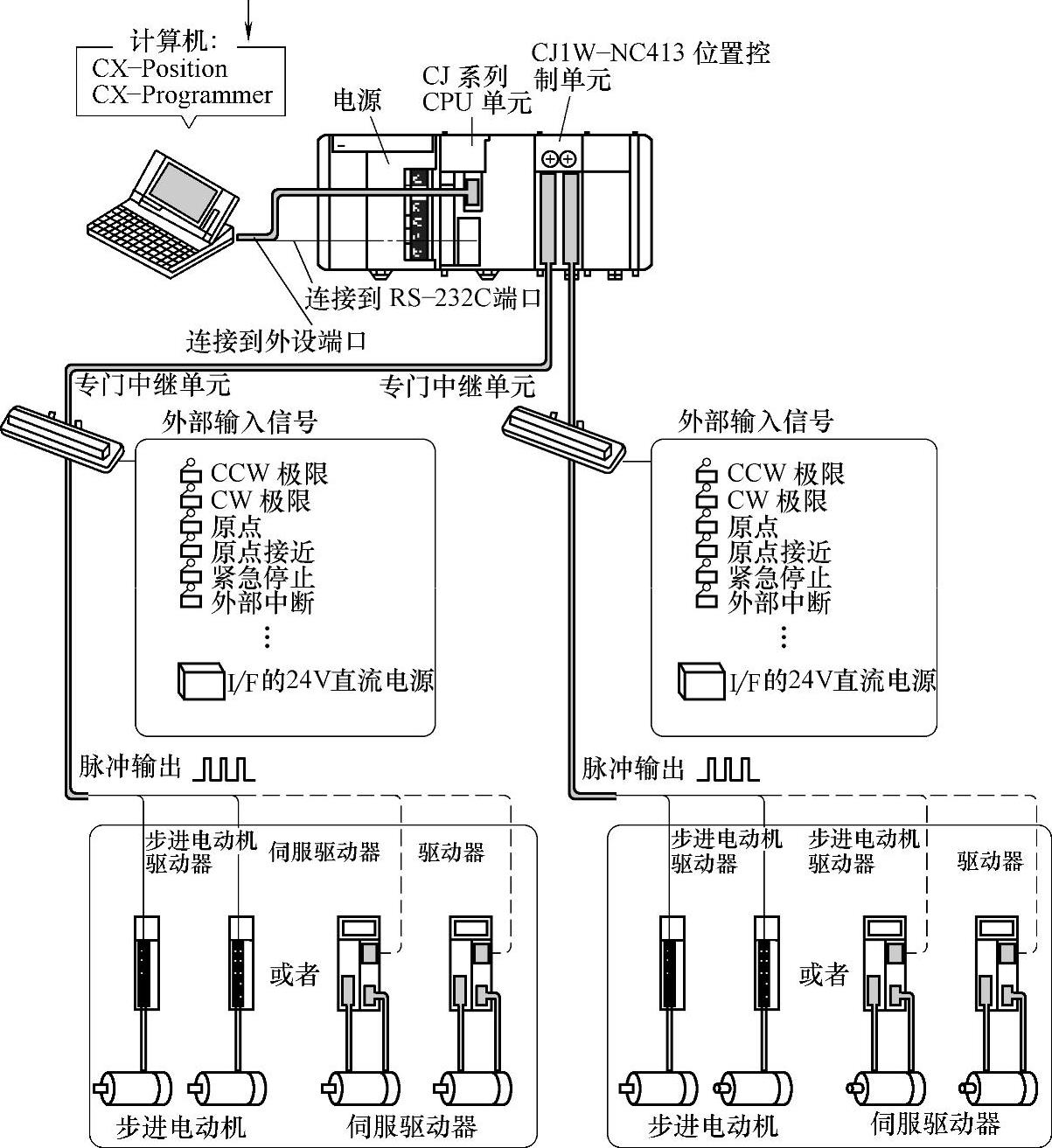
图5-79 位控系统接线及安装
从图知,其输入的开关量信号有:CCW(逆时针转动极限位置)、CW(顺时针转动极限位置)、原点、原点接近、紧急停止、外部中断等。输出为脉冲信号,可接步进电动机,也可接伺服驱动器(图中虚线所示)。该模块为4轴,故可接4套电动机。
2.性能
高速响应定位控制,PCU对于来自CPU单元的指令可在2ms内做出响应。
定位控制有两种方法:第一种是存储器操作,在这种操作中定位所需的信息先传输到PCU,然后由PCU实施控制;第二种是直接操作,在这种操作中每次的目标位置和目标速度都要由CPU单元设置。
定位可以在-1073741823~1073741823个脉冲位置范围内被执行,速度在每1个脉冲单位中在1~500000p/s范围内。这意味着在大范围内以精确的速度定位是可能的。
与基于Windows的NC支持软件(CX-Position)兼容,可用其在Windows环境下设置PCU。
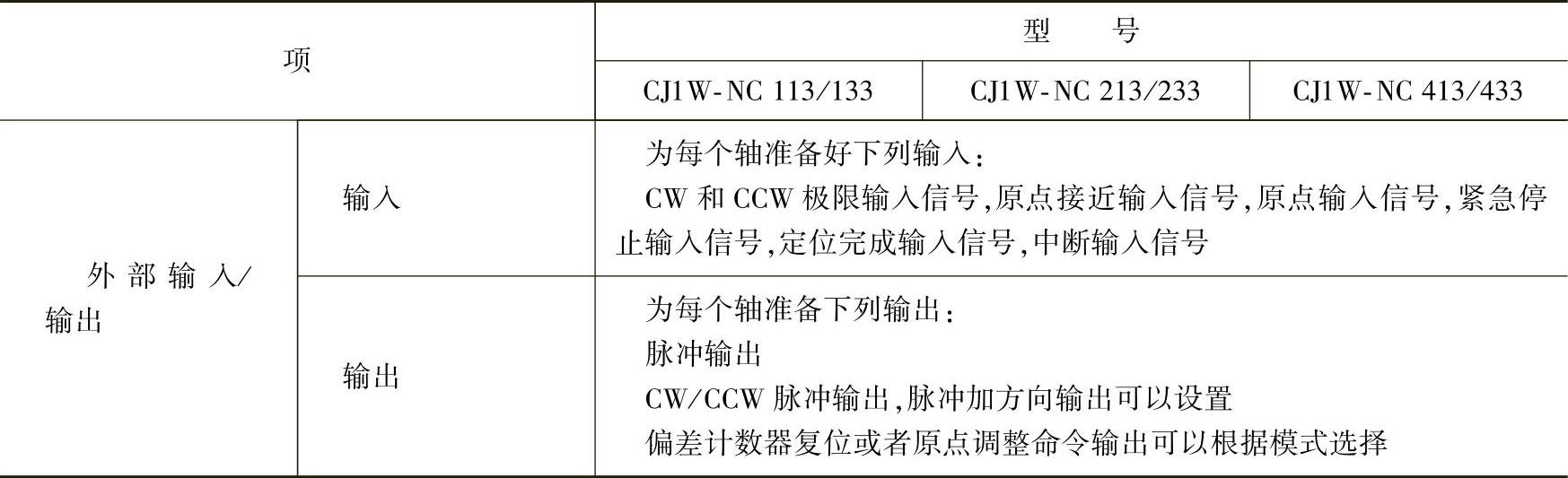
CJ1W的几个型号的主要性能如表5-19所示。
由表5-19可知,这里特性参数多与脉冲有关。而脉冲与运动有什么关系呢?这可用脉冲当量P表达:
P=t·θ/(360·i)
这里 P———脉冲当量,每脉冲运动部件的移动量,mm;
t———传动丝杠的螺距,mm;
θ———每脉冲电动机转动角度;
i———传动比,电动机与丝杠转速之比。
表5-19 性能
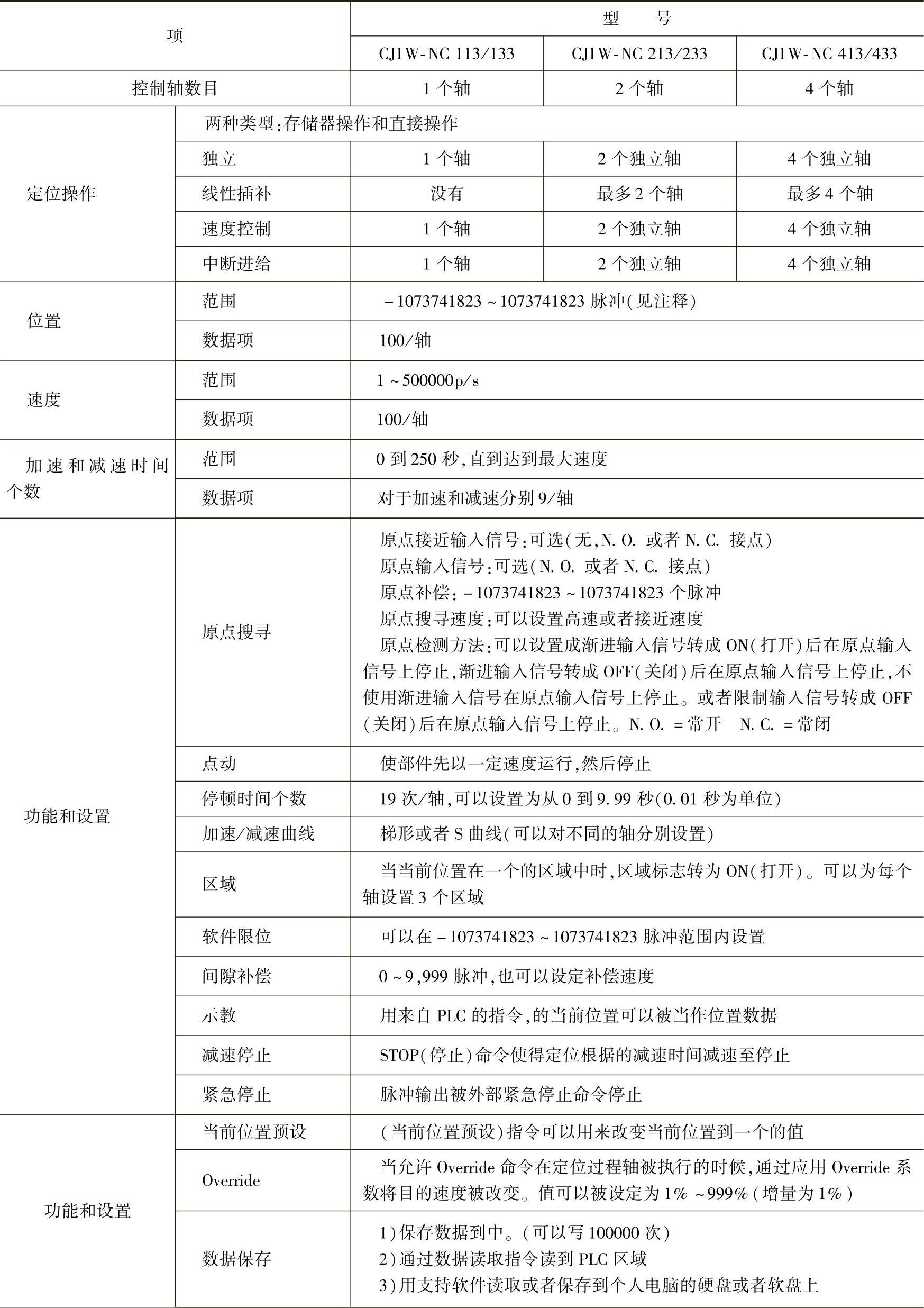
(续)
注:当执行线性内插法的时候,可以移动的距离不同。
显然,脉冲转角小,传动比大,螺距小,则脉冲当量小。脉冲当量小有利于提高定位精度。但运动总行程将缩短。因为
L=N·P
这里 L———移动距离,mm;
N———脉冲总数;
P———脉冲当量。
从上式知,P小时,同样的L值、N值就要大。而N值是有限制的,上述特性中的位置范围即是限制。为此,在系统设计时,对L与P要合理权衡。
CJ1W与C200HWNC单元性能相比,CJ1W的性能有很大提高。
3.操作
位控单元可进行的操作有:
(1)定位控制:定位的位移可用绝对数(即从原点到一个绝对的位置),也可用相对数(即从当前位置移到一个相对的位置)。定位控制的方法有3种:存储器操作、直接操作及中断操作。
1)直接操作。定位的位置和速度直接由CPU单元(梯形图程序)设置,并按定位操作命令执行。也有可能改变速度以及在定位正在进行过程中把移到其它位置的命令发送出去。然而,在直接操作中不可能用线性插补。图5-80所示为直接操作的例子。
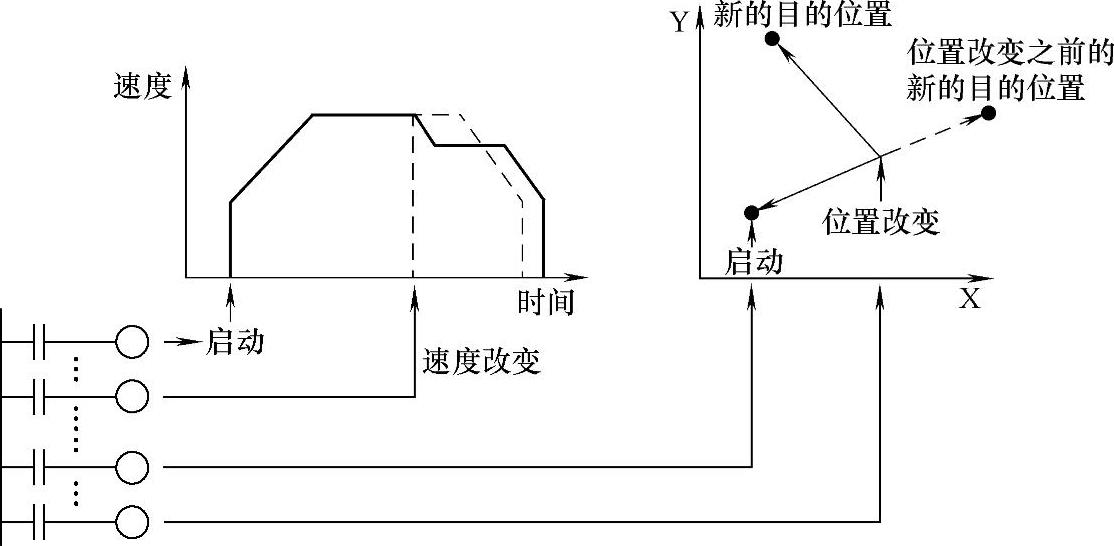
图5-80 直接操作例子
2)存储器操作。每个定位序列(即单独的定位操作,包含位置和速度之类的数据)提前传输到PCU,并存储。PLC用命令调序列号,令PCU执行定位。序列间的转换,可做不同的设置。可选用独立定位,自动定位,或者连续定位。图5-81所示为存储器操作的例子。它分别调“#0”、“#1”、“#2”和“#3”定位序列。并示出不同的序列间的转换。
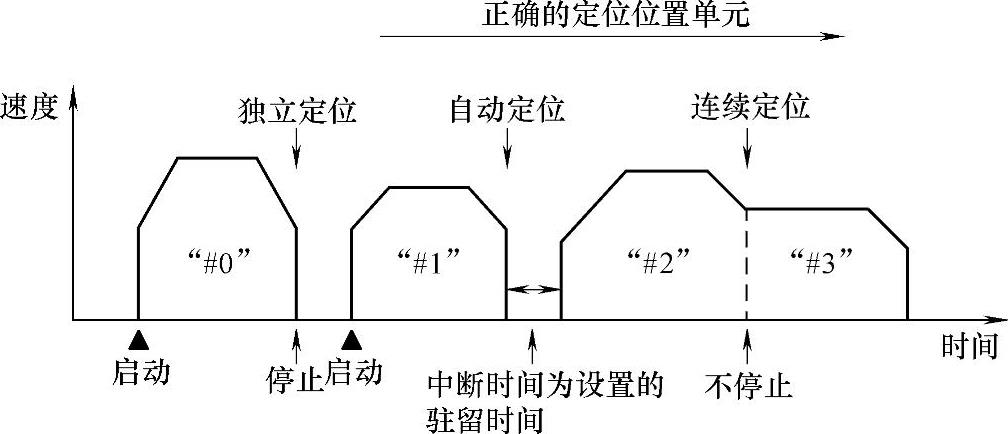
图5-81 存储器操作例子
3)中断操作。当接收到中断输入信号时,定位继续执行一定量的脉冲后停止。如图5-82所示。
(2)速度控制。当执行一次起动的时候,脉冲以恒定的速率持续的输出。其模式依赖于对存储器操作定位序列设置的有关代码。要停止这个序列,使用STOP(停止)指令。如图5-83所示。
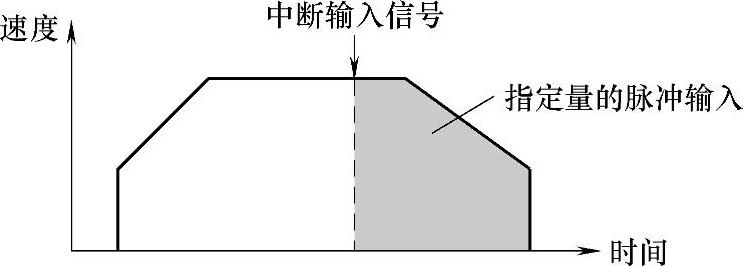
图5-82 中断操作
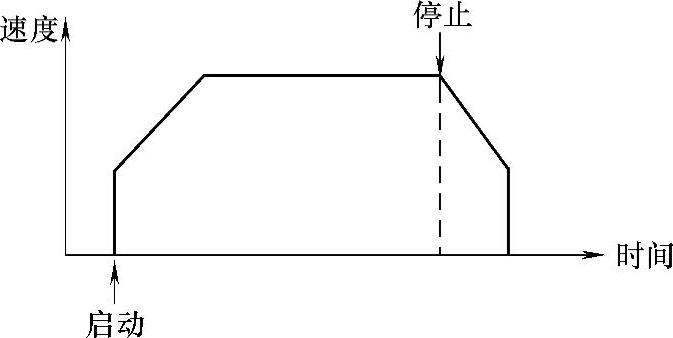
图5-83 速度控制
(3)其它操作。有原点搜索、点动、示教、Override、预置当前位置值、间隙补偿、区域设置及减速停止。
1)原点搜索。使部件运动,找到原点停止。
2)点动。使部件以一定速度移动然后停止。
3)示教。将当前位置当作的定位序列的位置参数,如图5-84所示。
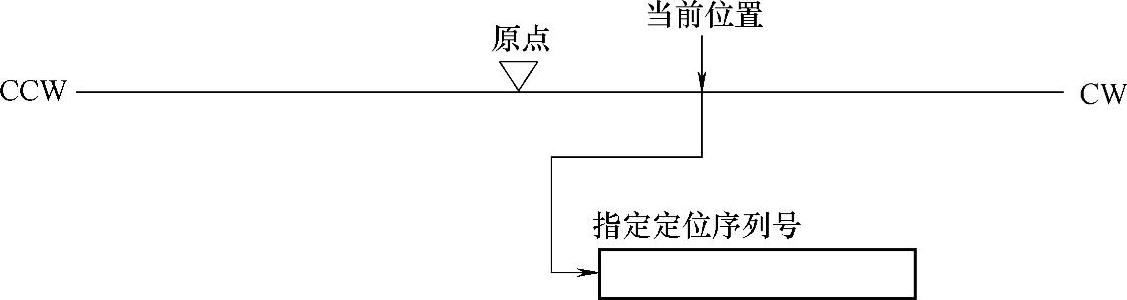
图5-84 示教操作
4)Override:当定位过程中授权了Override时,目的速度被改变为Override速度。如图5-85所示。
5)预置当前位置值:改变当前位置PRESENT POSITION PRESET(当前位置预设)命令将当前位置变到一个的位置。
6)间隙补偿:该操作用以补偿齿轮间隙,或传动装置中的其它间隙。
7)区域设置:一个区域是一个位置范围,可能定义它是为了无论何时,只要当前位置在范围之内,就将标志转为ON。如图5-86所示。
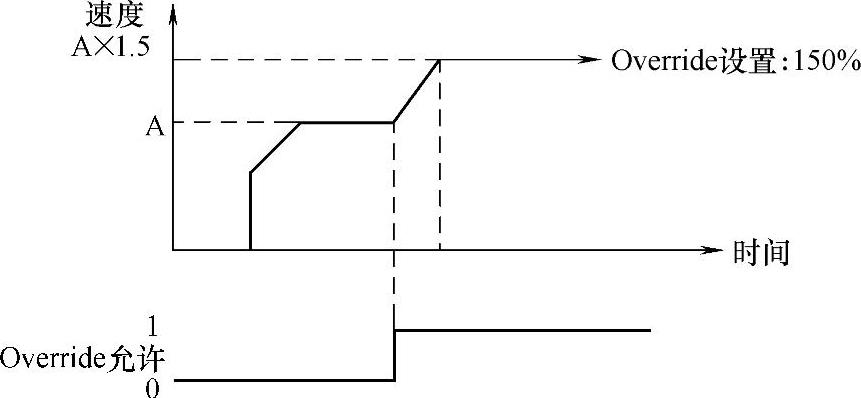
图5-85 Override
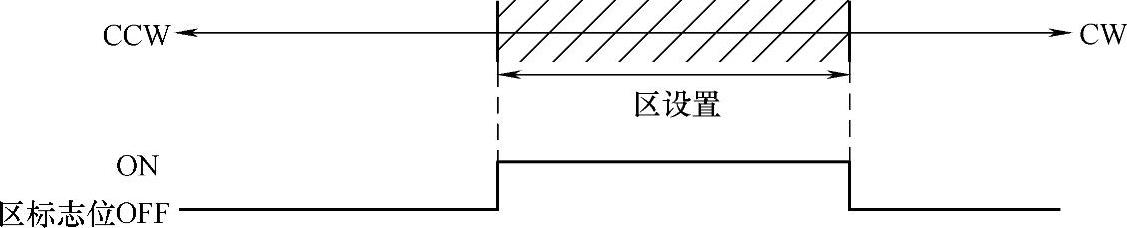
图5-86 区域设置
8)减速停止:使定位减速到停止。如图5-87所示。
4.设定
使用PCU,首先是单元号设定,在单元面板的单元号开关上设定。对CJ1W-NC413/NC433,其范围为0~94。对CJ1W-NC113/NC133/NC213/NC233C200H机,其范围为0~95。
单元号设定后,CJ1W-NC113/NC133/NC213/NC233型号分配10个字归其使用,而CJ1W-NC413/NC433型号要用20个字。可以在上面给出的范围之内任意设定,但不能与其它单元的单元号重叠。
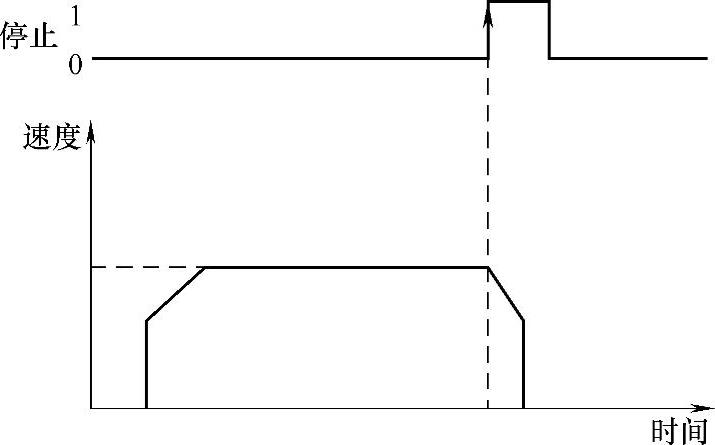
图5-87 减速停止
确定单元号,其所用的10个或20个工作通道与100个或200个数据存储区也随之确定。若单元号设为x,则其工作通道首地址n:n=2000+x·10
而存储区的首地址m:
m=20000+100x
这10或20个工作通道分别用作输出控制(n~n+4)及接受输入信号(n+5~n+9)。
5.数据
用户可以通过设置一个公共参数来选择在CPU单元的数据存储器区域里设置的轴参数是否传送到PCU中使用,或者是否使用保存在PCU的快闪存储器中的轴参数。图5-88所示CPU与PCU有关数据及其相互交换的情况。
注:用户可以通过设置一个公共参数,来选择在CPU单元的数据存储器区域里设置的轴参数是否传送到PCU中使用,或者是否使用保存在PCU的快闪存储器中的轴参数。
从图可知,在CPU单元有4个数据区:由单元号确定的CIO中的I/O字(操作存储器区),DM分配给特殊I/O单元的区域字(公共参数区及轴参数区),用户指定的数据区域的DM或EM字及用户指定的用于传送数据的DM或EM字。
(1)操作存储器区域。特殊I/O单元的I/O区。开始字由设置的PCU单元号决定:
n=2000+10×单元号
其输出用以控制PCU的操作,如表5-20所示。其输入用以读取PCU的有关工作状态信息,如表5-21所示。在每个I/O刷新时,数据被更新。
DM分配给特殊I/O单元的区域字包括公共参数区域及轴参数区域。
(2)公共参数区域。特殊I/O单元的数据存储区(DM)的m到m+3,4个字。用以设置与PCU基本操作有关的参数,见表5-22。而m=D20000+100×单元。在使用PCU之前必须设置公共参数。
在设置好公共参数后,这些参数将会在下一次PCU被上电或者重新起动时生效。
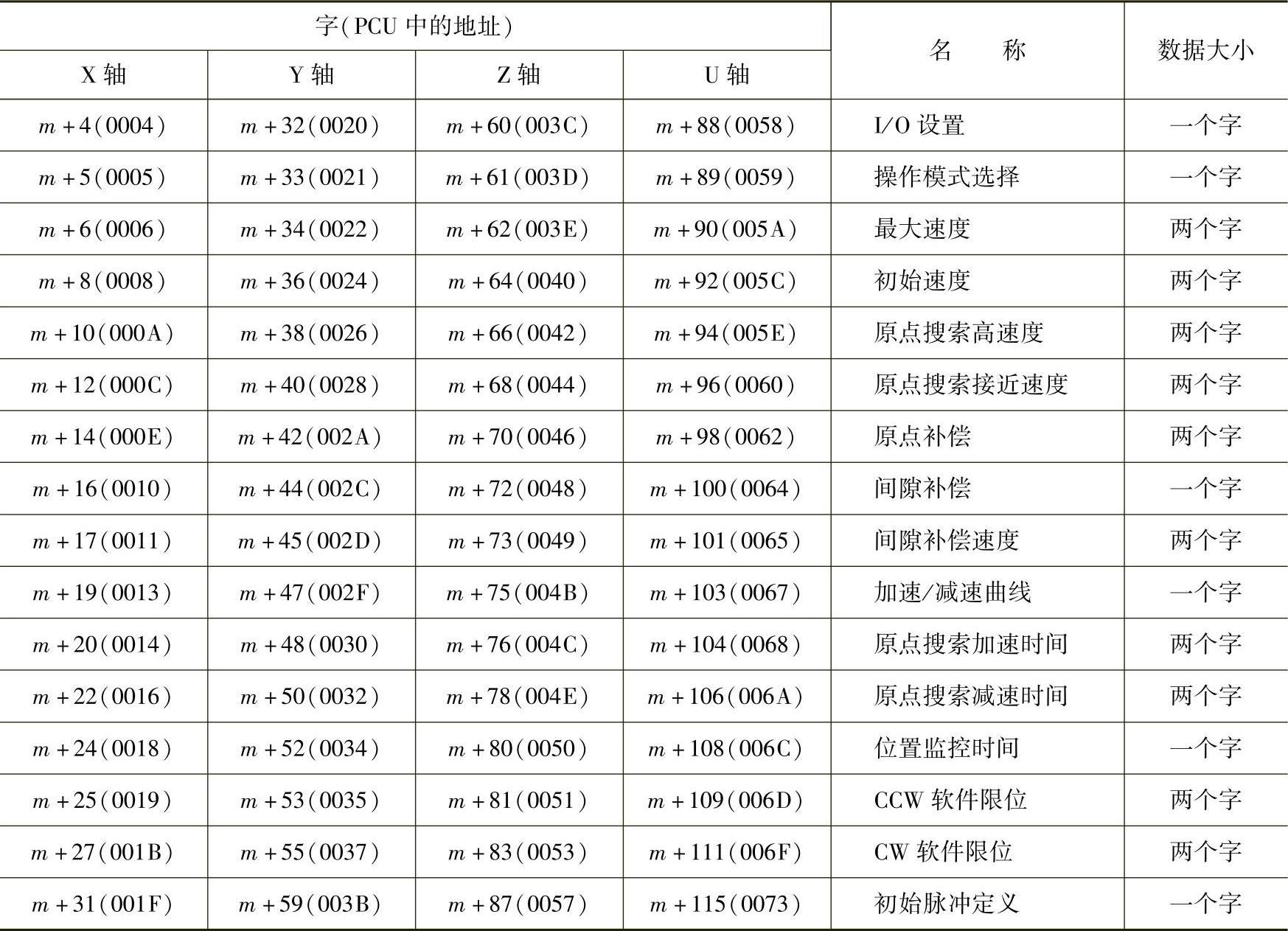
(3)轴参数区域。特殊I/O单元的数据存储区(DM)的其它部分。用以设置与轴操作有关的参数,见表5-23。(https://www.xing528.com)
其中I/O设置,定义和I/O相关的下列项:输出脉冲选择(CW/CCW输出,脉冲/方向输出);触点类型(N.O./N.C.),极限输入信号,原点接近输入信号,以及原点输入信号;
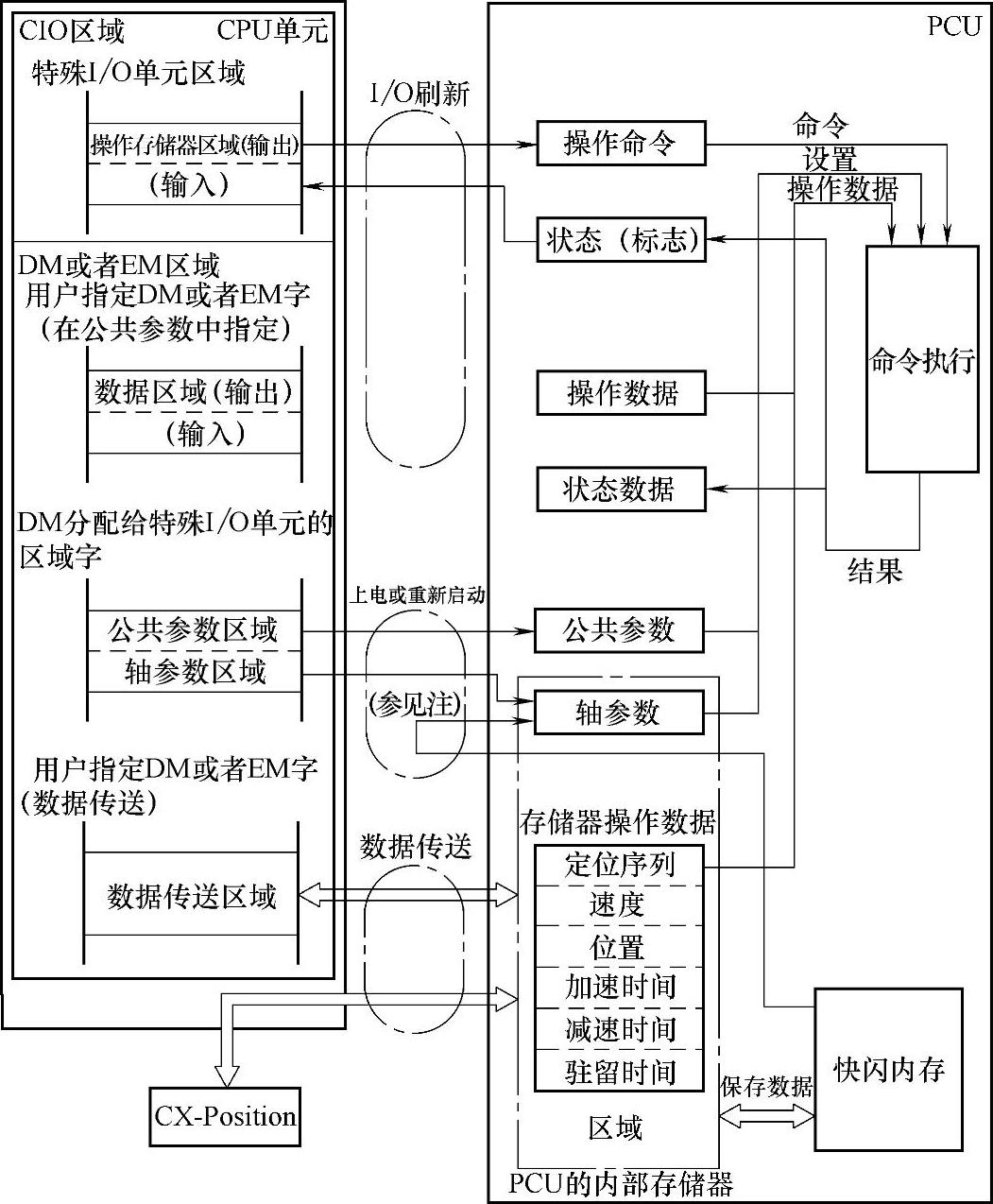
图5-88 CPU与PCU数据及其相互交换
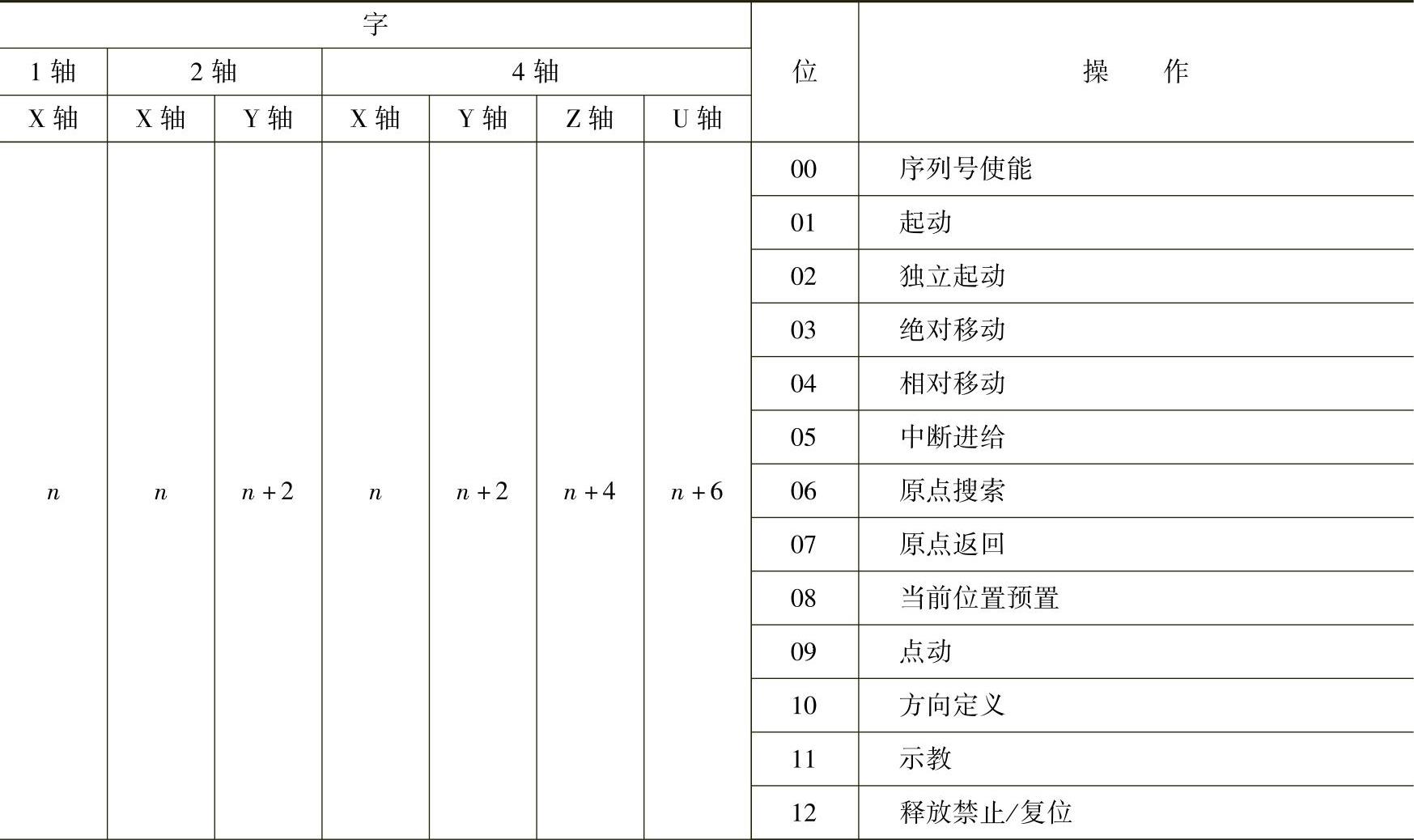
表5-20 操作存储器区域(输出)
(续)
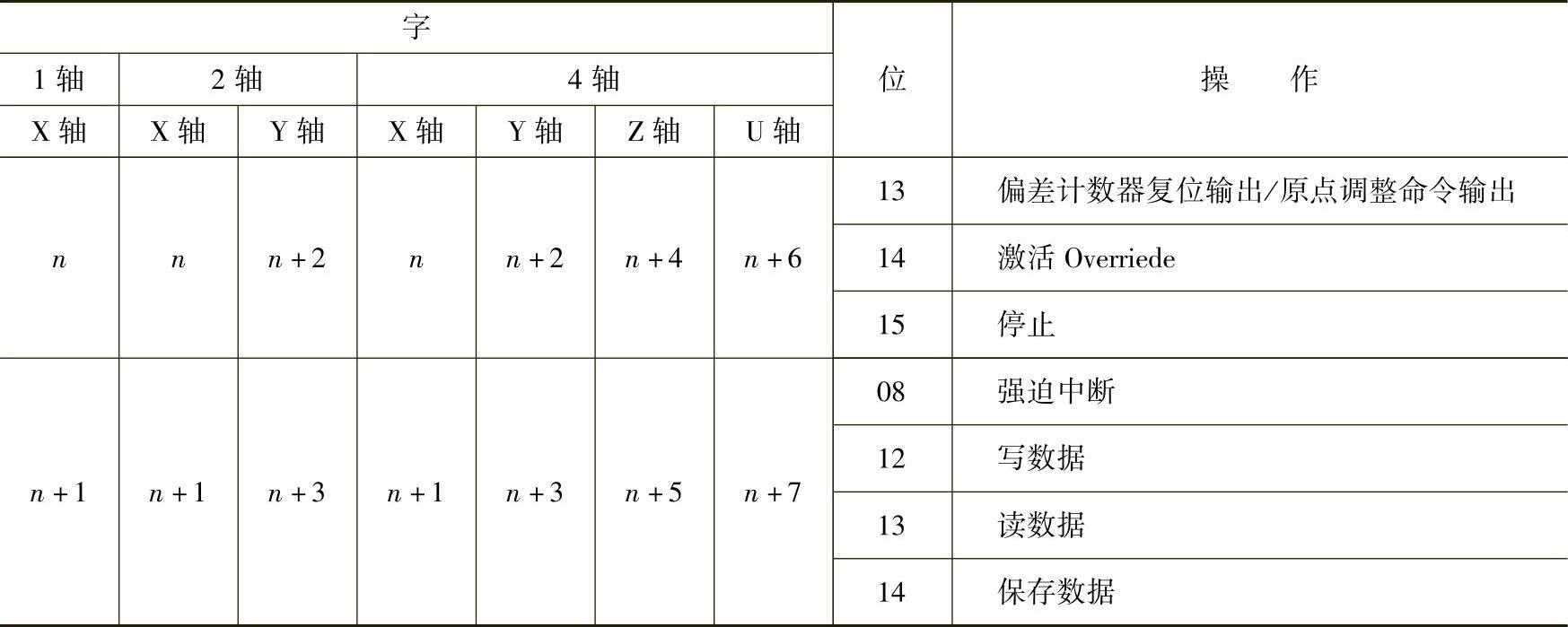
表5-21 操作存储器区域(输入)
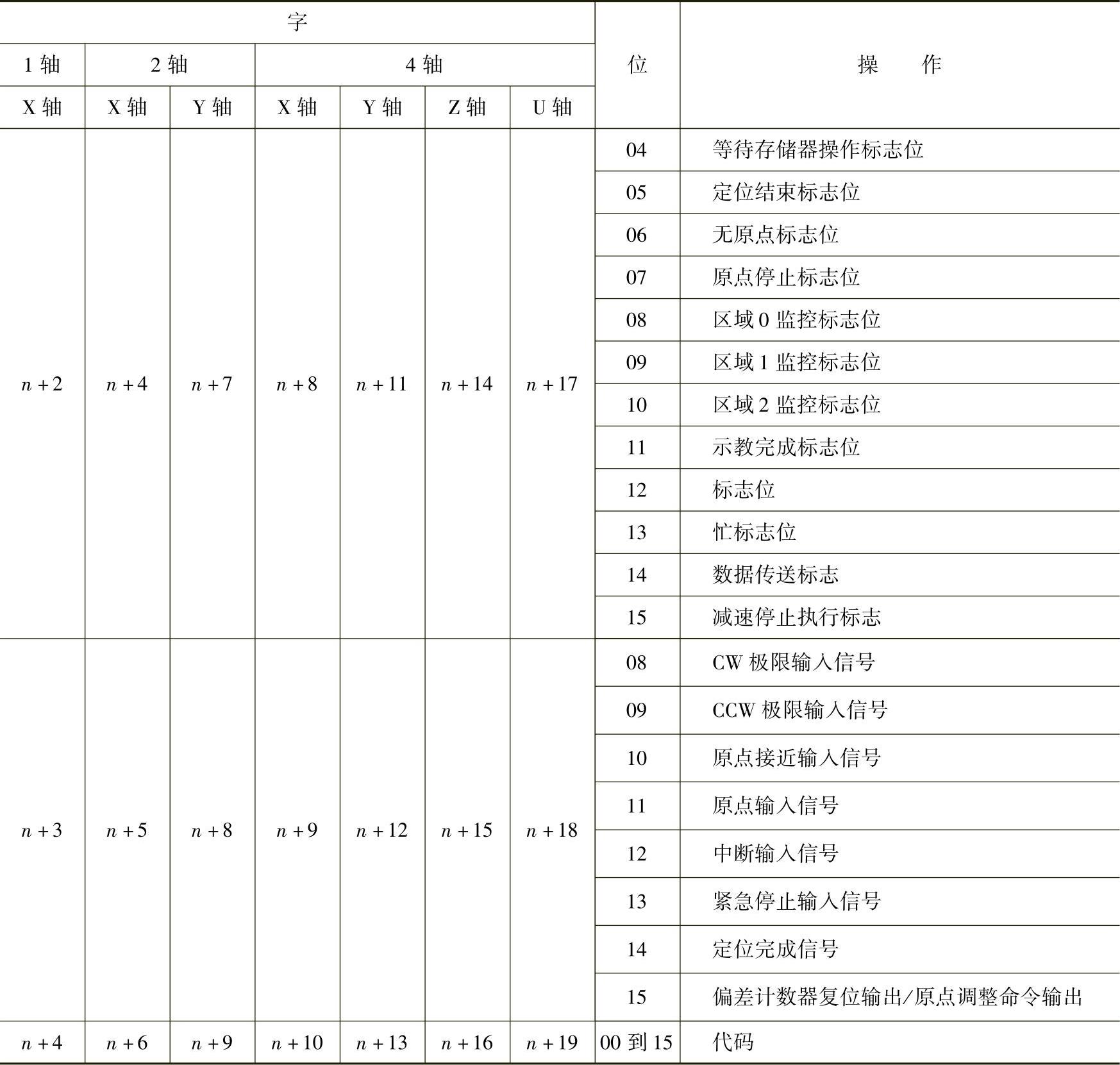
表5-22 公共参数区域
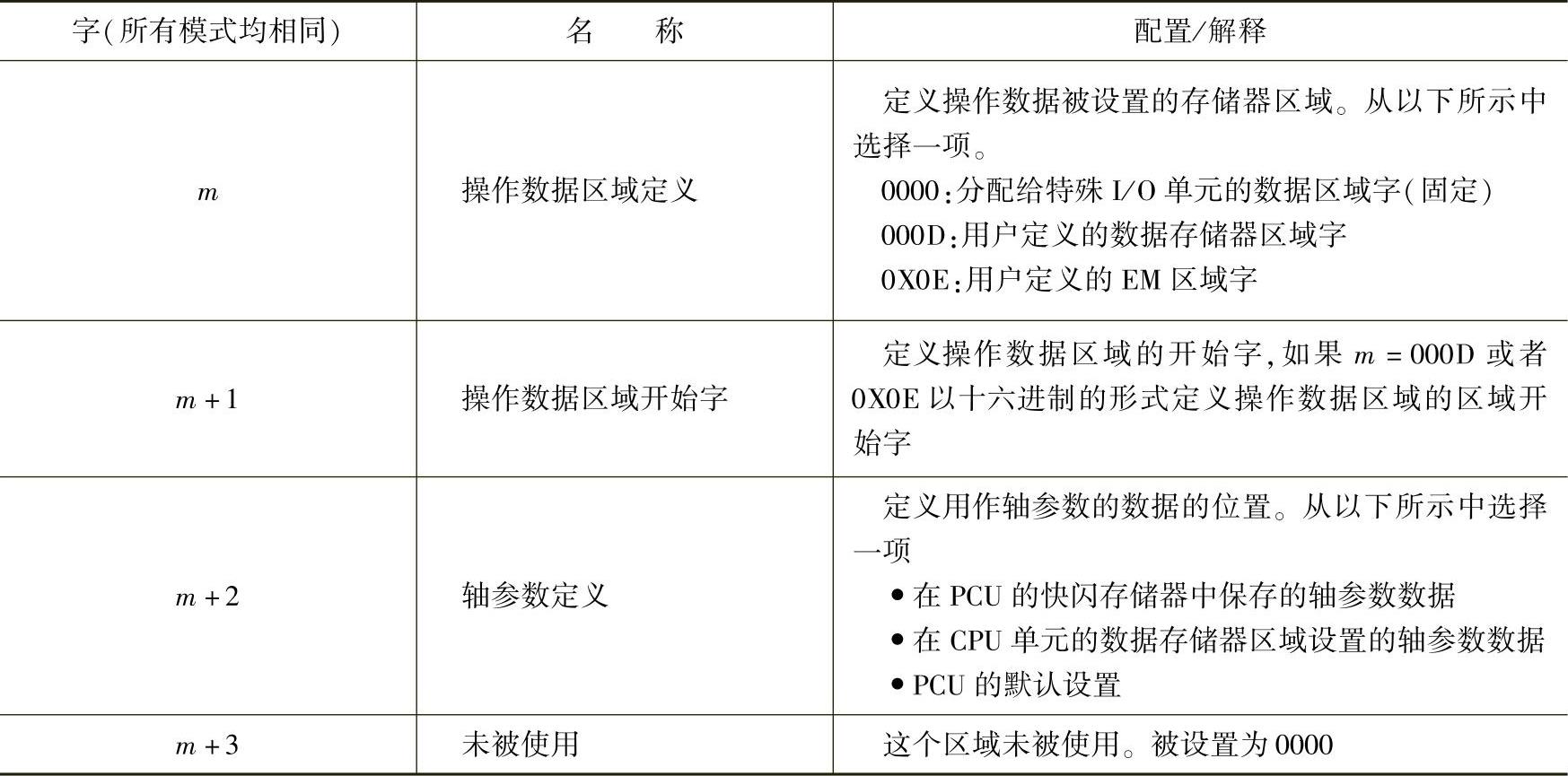
表5-23 轴参数区域
当输入紧急停止信号时,偏差计数器输出控制;当输入紧急停止信号或者极限信号时原点丢失。
其中模式设置,用以设置电动机驱动器的选用以及定义原点检测方法。有4种模式:当使用步进电动机驱动器时,设置为模式0;当使用伺服驱动器,并且不使用定位完成信号将驱动器输入和偏差计数器复位输出信号连接起来的时候,设置为模式1;当使用伺服驱动器,并且将驱动器输入和偏差计数器复位输出信号连接起来的时候,设置为模式2;当使用伺服驱动器,并且同时使用原点调整命令时设置为模式3。默认设置为模式0。
(4)操作数据区域。在公共参数区域中,指定的DM或EM字。分公共部分与个别部分。公共部分用以设置数据传送有关操作,如表5-24所示。个别部分用以设置位置,速度以及加速/减速时间,以及存储器操作的位置号,如表5-25所示。同时包含PCU状态数据,例如目前的位置和那些目前执行的位置序列号。在每个I/O刷新时,数据被更新。设置数据被起动并且在每个运行的起动时使用。
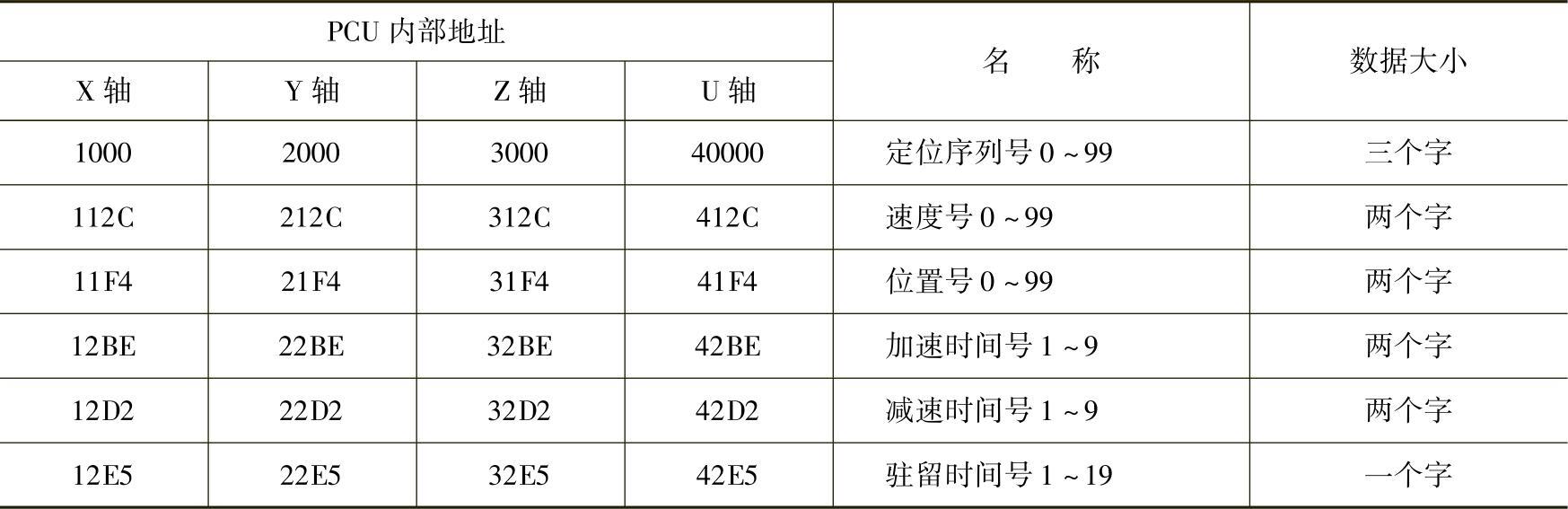
(5)用户指定的用于传送数据的DM或EM字。操作数据区域(公共部分)指定的DM或EM区,用以暂存有关存储操作的有关数据。以便用操作存储器区域的输出命令,在实施存储操作前传送给PCU的内部存储器操作区域(可以被存储到PCU的快闪存储器中)。
存储器操作区域的内部地址,如表5-26所示。包含6种类型的数据:定位序列、速度、位置、加速时间、减速时间及驻留时间。各含100组。
表5-24 操作数据区域(公共部分)
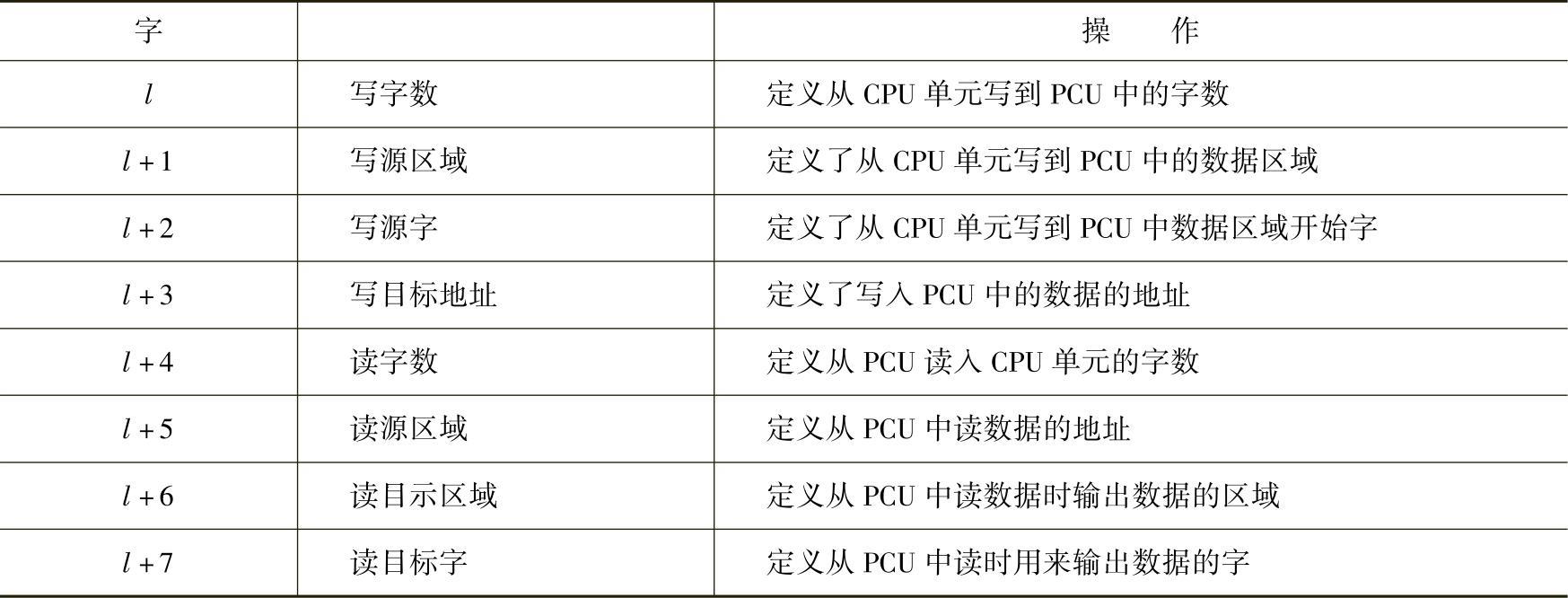
表5-25 操作数据区域(个别部分)
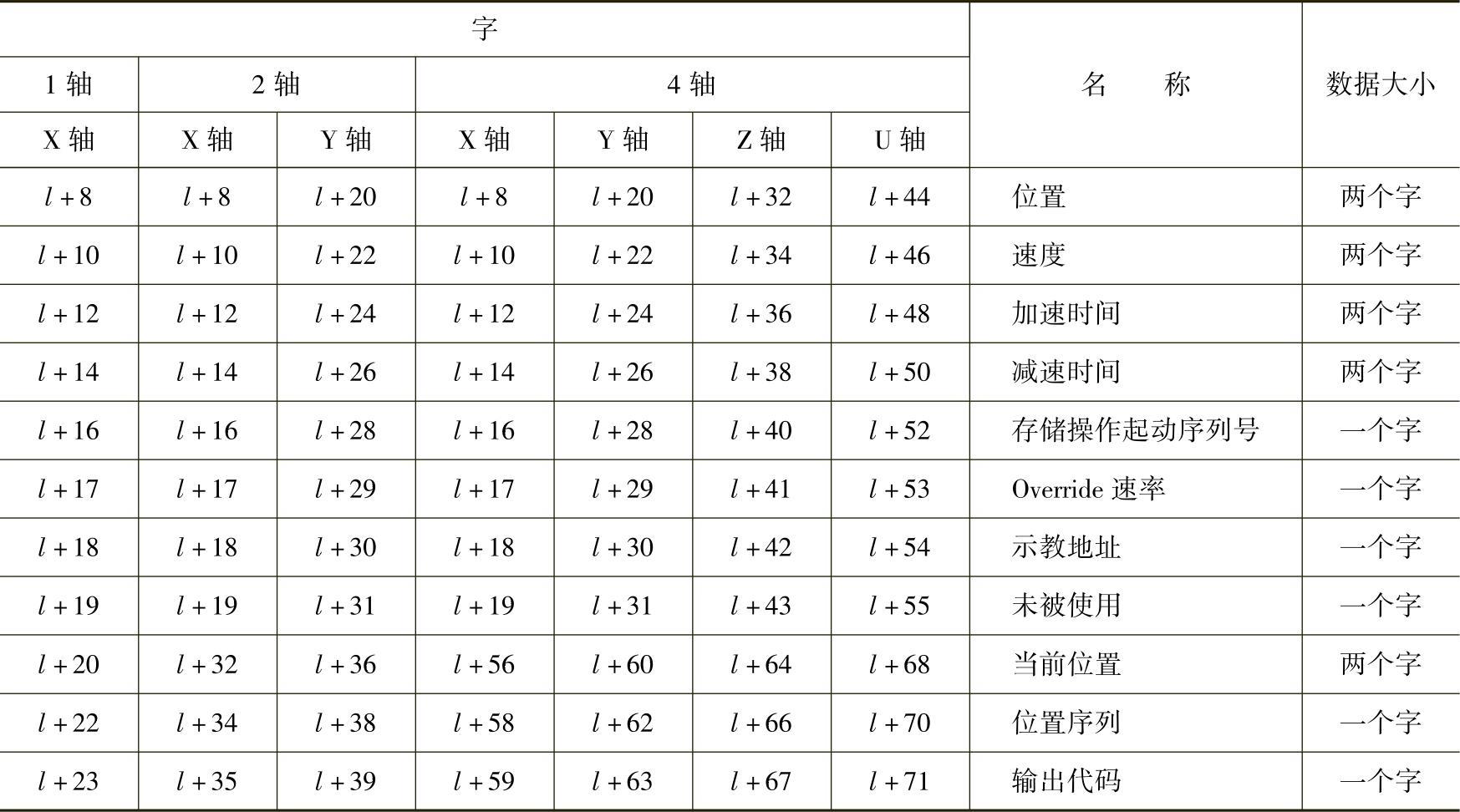
表5-26 存储器操作数据
其中定位序列3个字的含义,以X轴的序列1为例,如下:

具体各项的内容为:
轴定义: 将活动轴设置为“1”位15:U轴;14:Z轴;13:Y轴;12:X轴
输出代码: 00~0F十六进制
位置指定: 指定每个轴的位置数据是绝对或者是相对位置。位7:U轴;6:Z轴;5:Y轴;4:X轴0:绝对位置;1:相对位置
完成代码: 00~06Hex(0~6)
驻留时间号 00~13Hex(0~19)
加速时间号 0~9Hex(0~9)
减速时间号 00~09Hex(0~09)
初始/目标速度号: 00~63Hex(0~99)
速度的设定如下:

设置速度#0(以pps为单位)该速度可以用两个字32位无符号十六进制数设置在1~1000000p/s。设置范围:00000001~000F4240十六进制(1~1000000)
位置设定如下:

设置位置#0(以脉冲为单位)位置可以用两个字,32位有符号十六进制数据设置在范围-1073741823~1073741823脉冲之间。
设置范围:C0000001~3FFFFFFF(-1073741823~1073741823)
前已提及,位控单元的有多种操作,现仅对直接操作及存储操作讨论如下:
1)直接操作。直接操作进行位置的方法是:先在操作数据区域设定位置、速度、加速/减速时间等数据,通过传送指令及I/O刷新输出,把操作数据传给PCU;后使用操作存储区起动操作,具体实现定位过程。图5-89所示为这两步骤的过程。
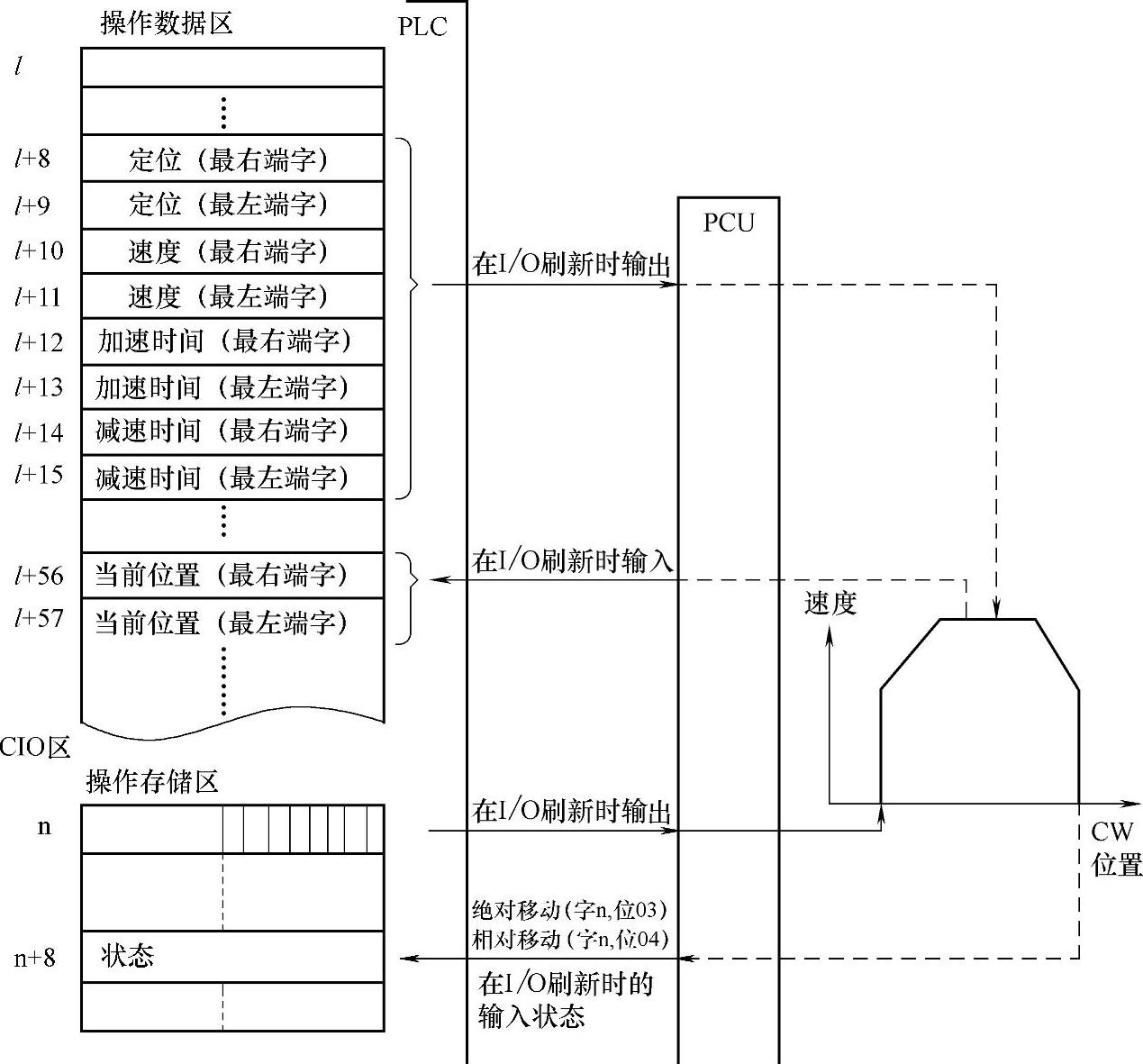
图5-89 直接操作过程
直接操作实现步骤:
(a)设置公共参数:
m:设置操作数据区到DM或者EM。
m+1:设置操作数据区(l)开始字。
m+2:指定轴参数。
(b)重新上电或者重新起动。
在上面被设置在(l)中的公共参数区中的数据可用。
(c)设置操作数据区(以单轴为例):
在l+8和l+9中,设置位置。
在l+10和l+11中,设置速度。
在l+12和l+13中,设置加速时间。
在l+15和l+16中,设置减速时间。
(d)执行绝对移动或相对移动。
把绝对移动命令位(字n,位03)或相对移动命令位(字n,位04)置位。
直接操作还有一些细节,如多重起动、加减速时间计算,可参阅有关说明。
2)直接操作例子。使用的位置控制单元是一个NC113,轴参数设置用缺省值。X轴以15000p/s的速度,相对移动135000脉冲,如图5-90所示。
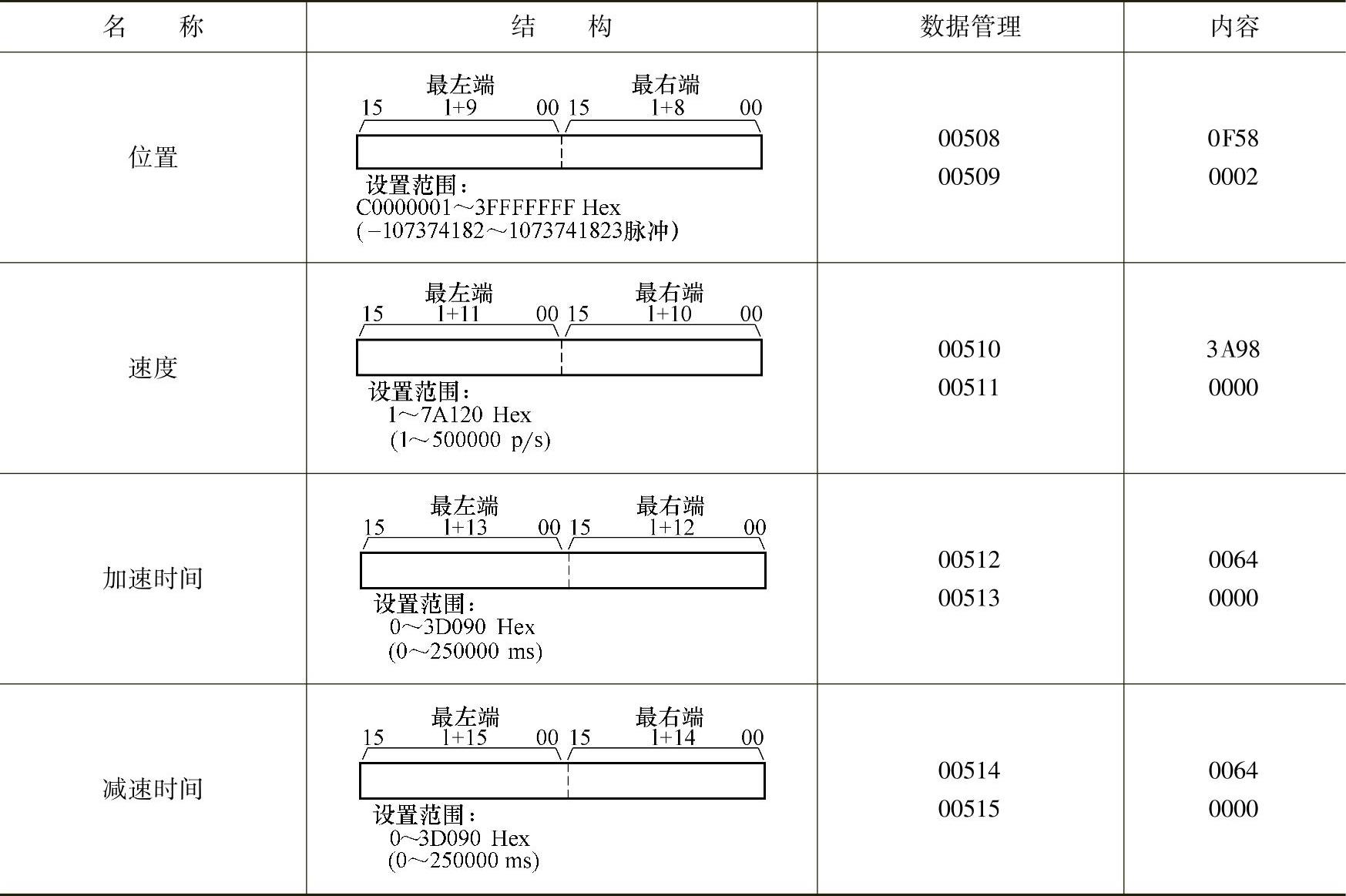
单元号及有关设定如表5-27所示。位置、速度等设定如表5-28所示。梯形图程序如图5-91所示。从图知,这个程序是很简单的。主要的工作是做好设定及设计好参数。
3)存储操作
存储操作,应先把与定位序列有关的位置和速度等定位数据,预先传送到位置控制单元的内部存储器中,然后,根据操作存储区的控制命令,起动定位序列实施定位。其过程如图5-92所示。
存储操作存储的数据量大,最多可进行100组操作,而不像直接操作,每个起动命令只能进行一个操作。
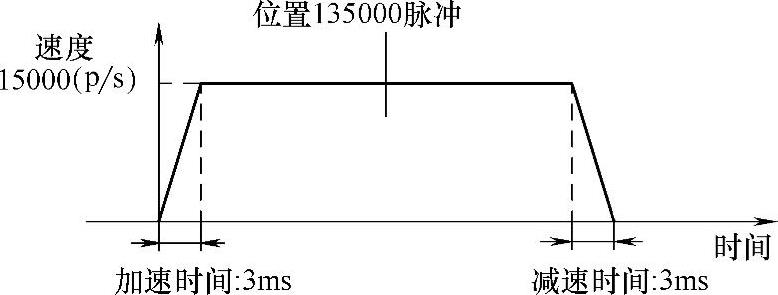
图5-90 定位图
表5-27 单元号及有关设定
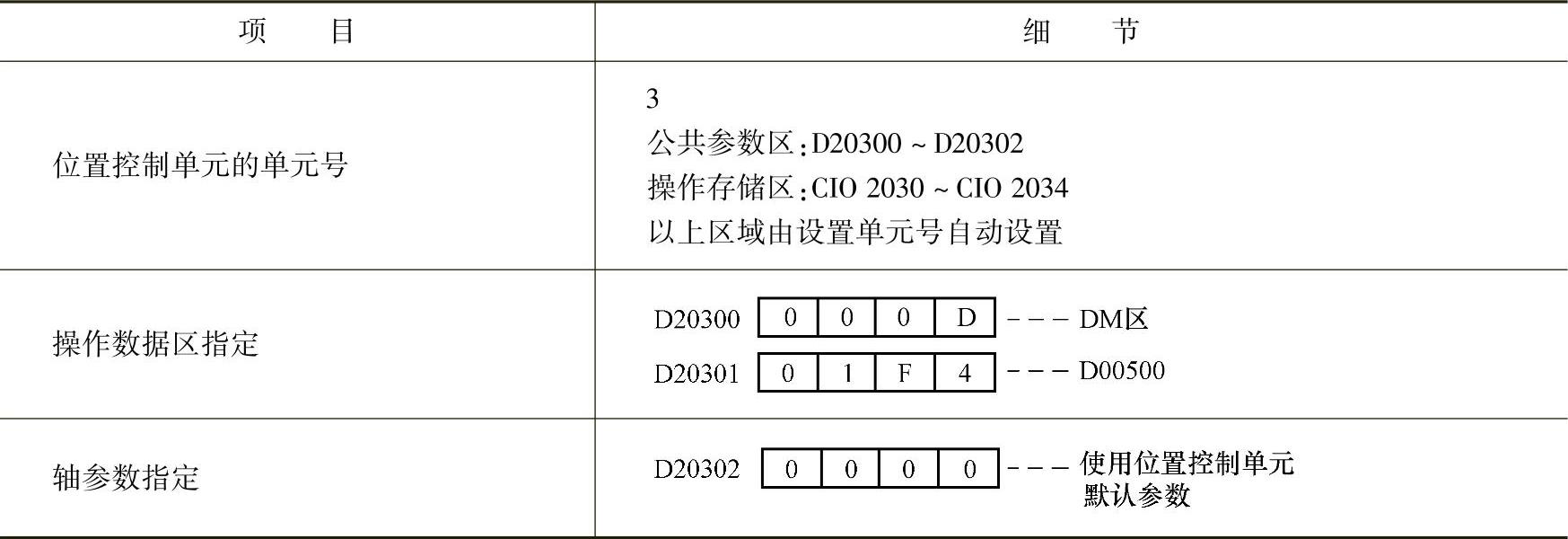
表5-28 位置、速度等设定
4)存储操作例子
本例为使用NC113位置控制单元实现如图5-93所示的位置控制。
定位序列设置见表5-29。这里设置了序列10及11。单元号及有关设置见表5-30。
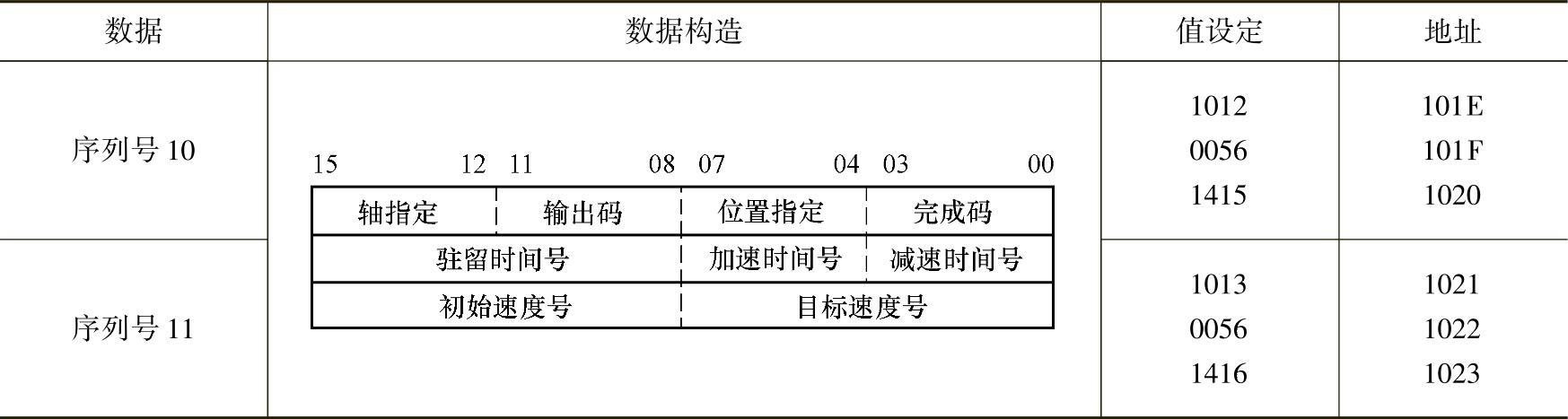
定位序列10、11的细节设置如表5-31所示。速度设置如表5-32所示。
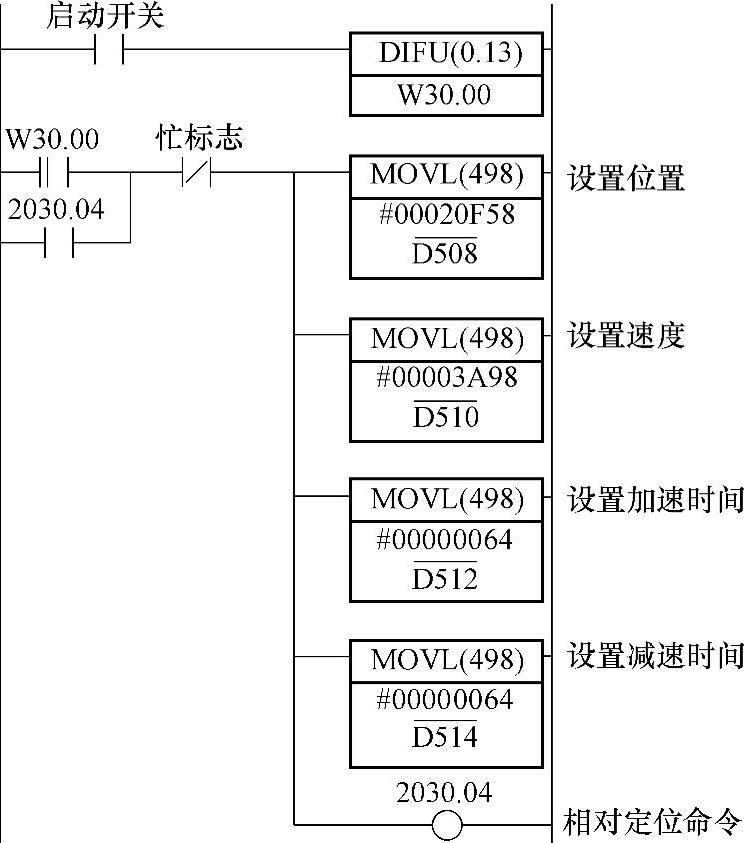
图5-91 直接操作程序
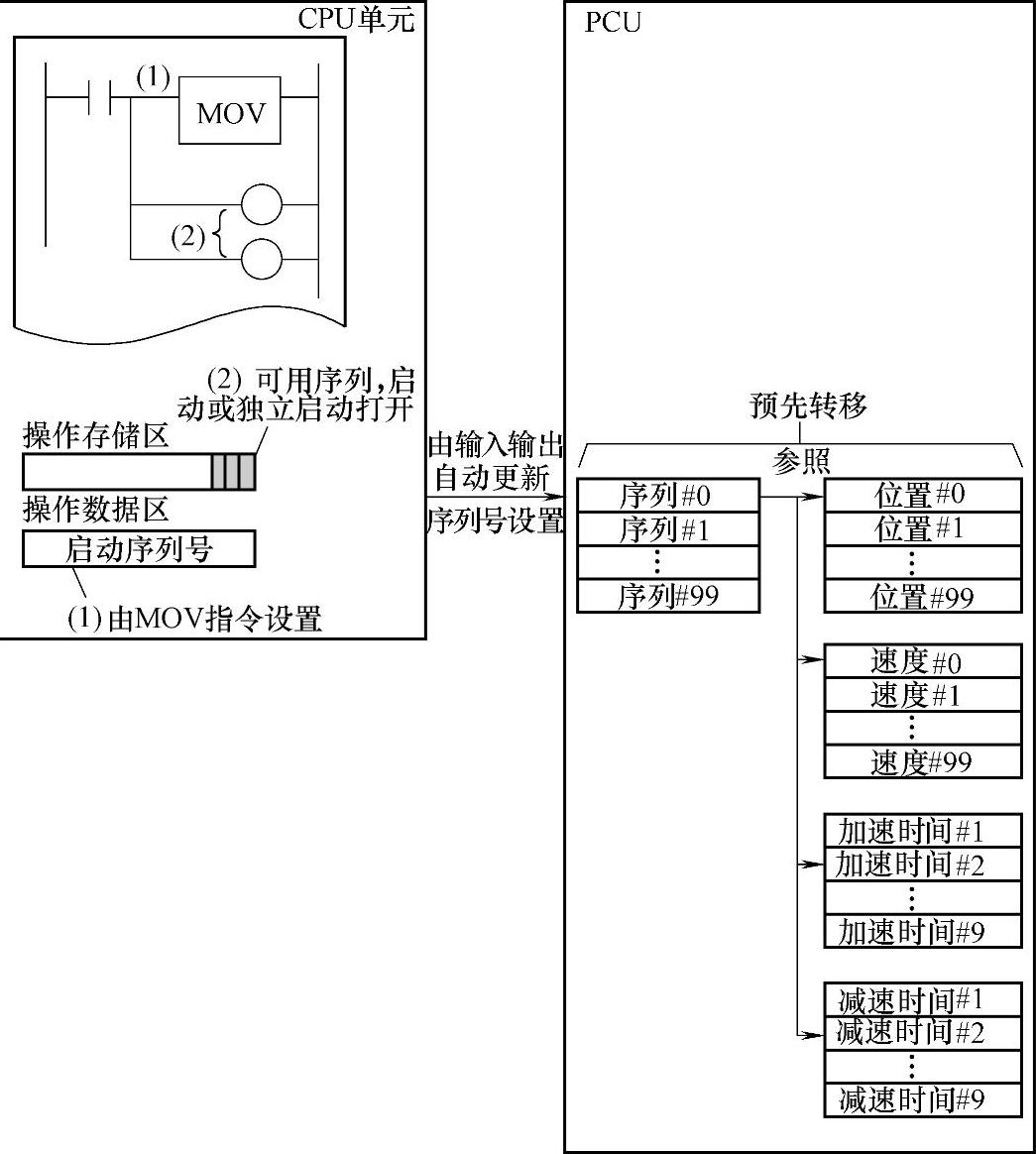
图5-92 存储操作过程
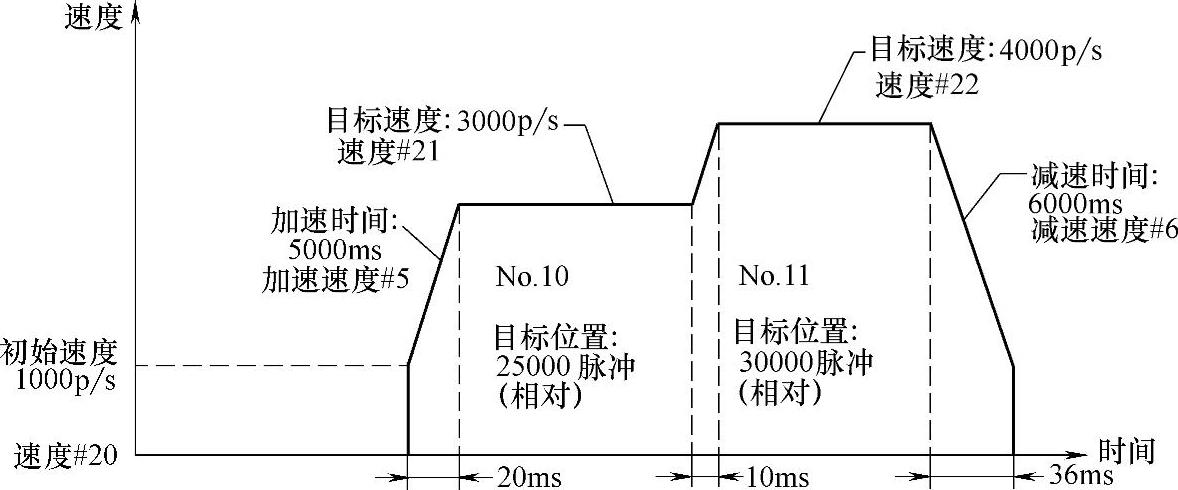
图5-93 位置控制要求
表5-29 定位序列设置
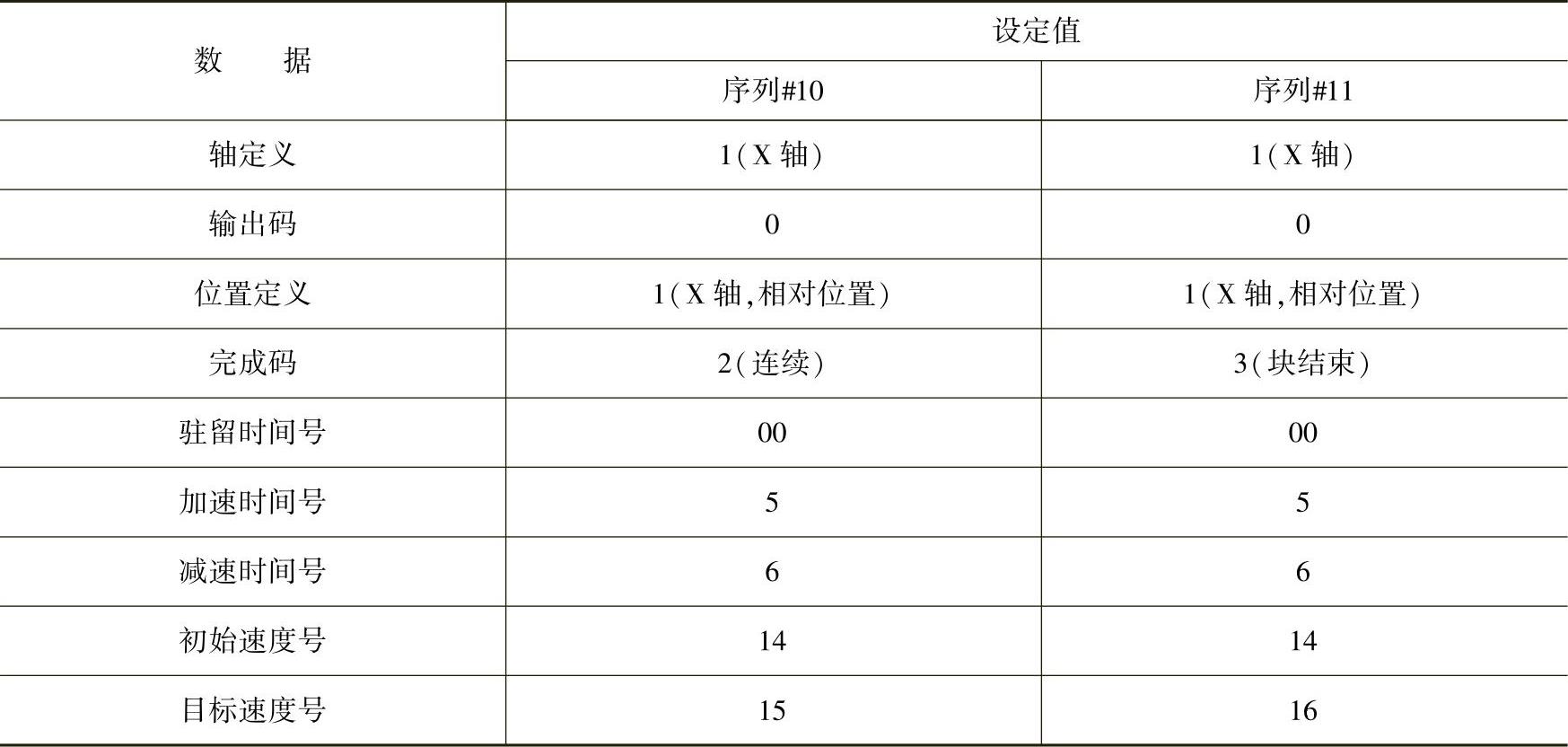
表5-30 单元号及有关设置
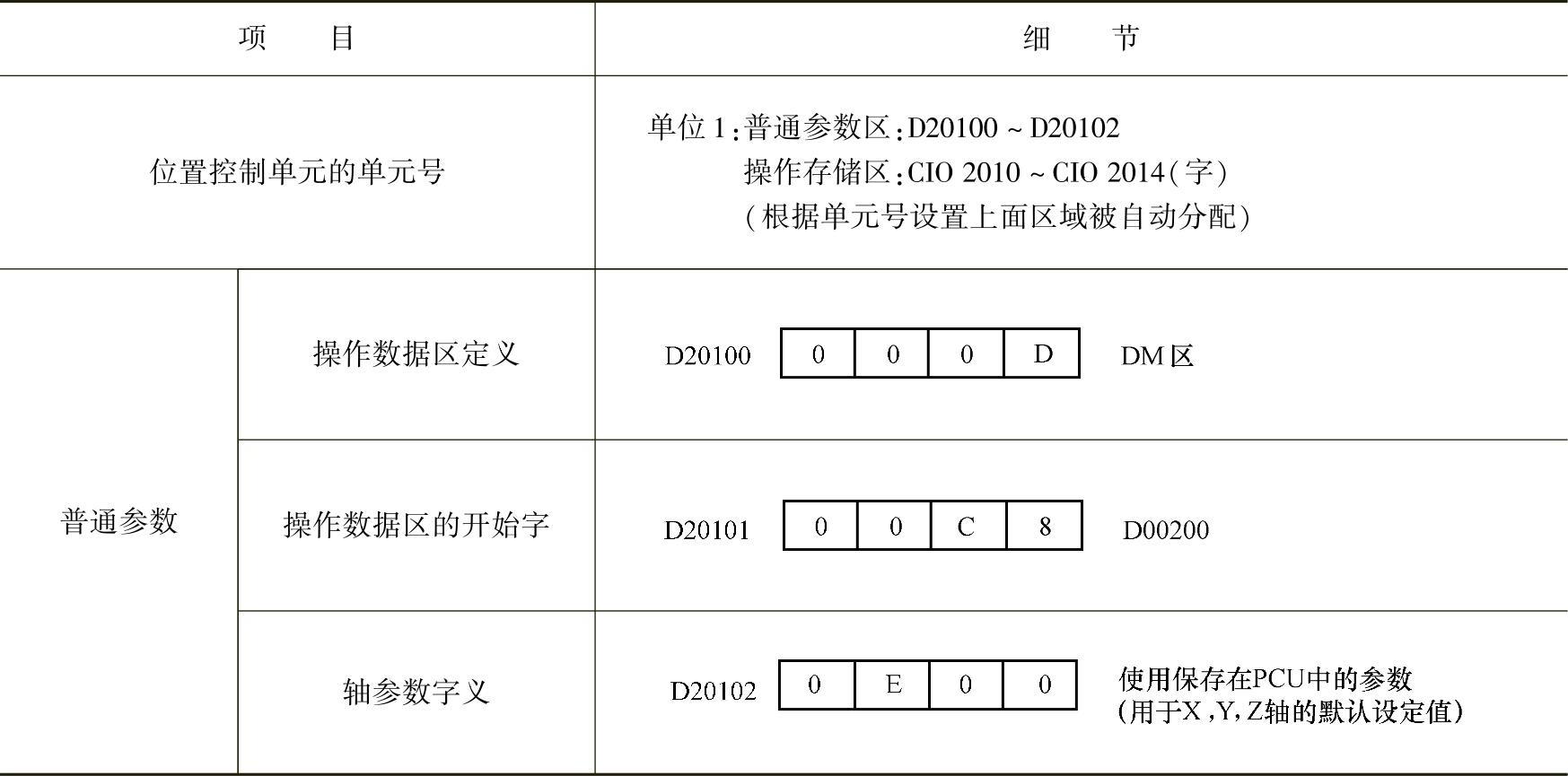
表5-31 序列设置细节
数据传送梯形图程序如图5-94所示。而起动定位梯形图程序如图5-95所示。程序也都比较简单。
表5-32 速度设置
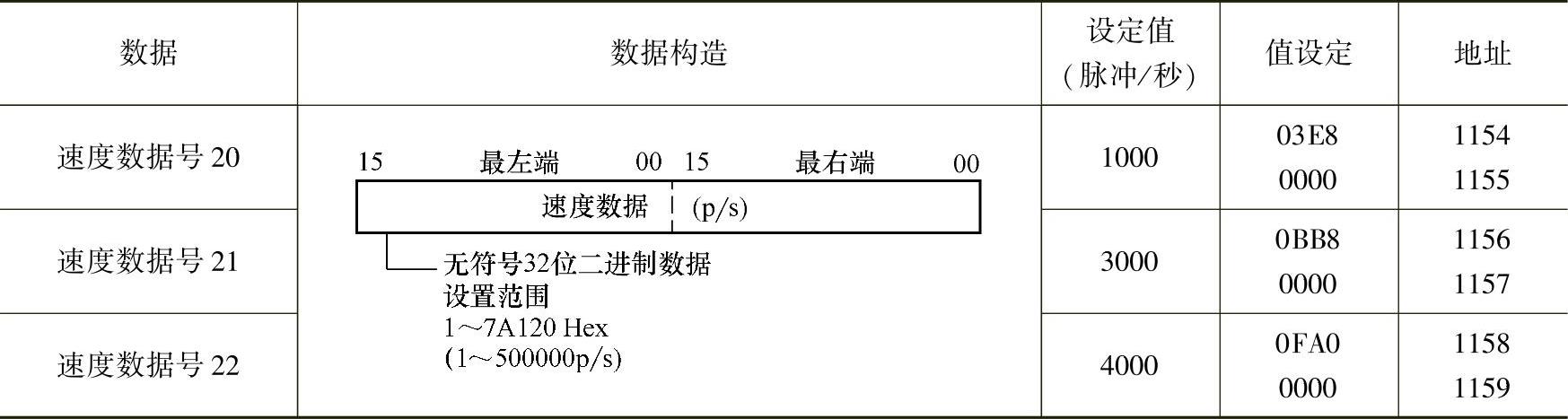
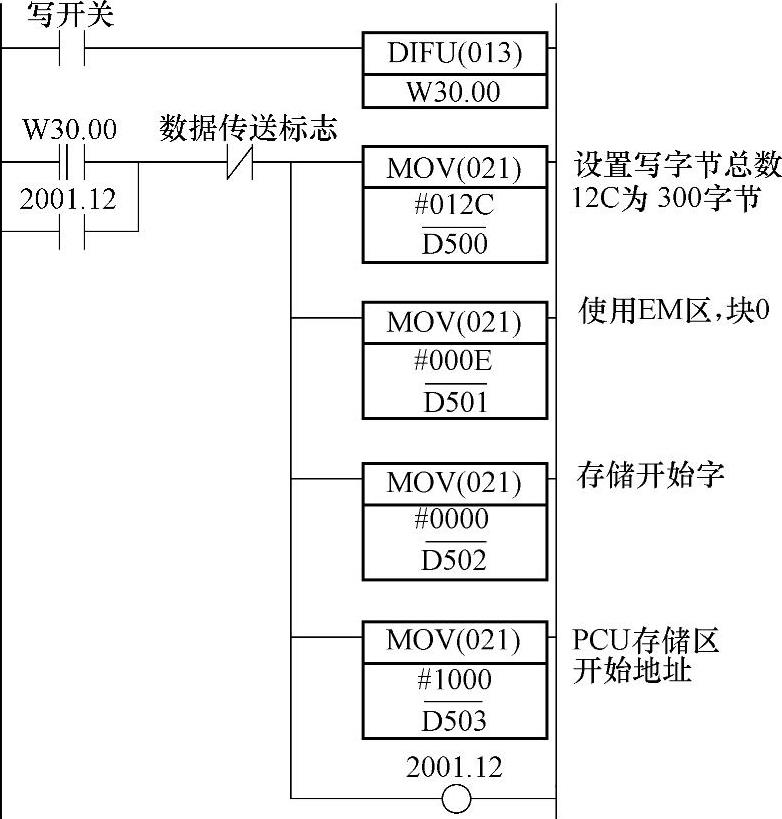
图5-94 数据传送程序
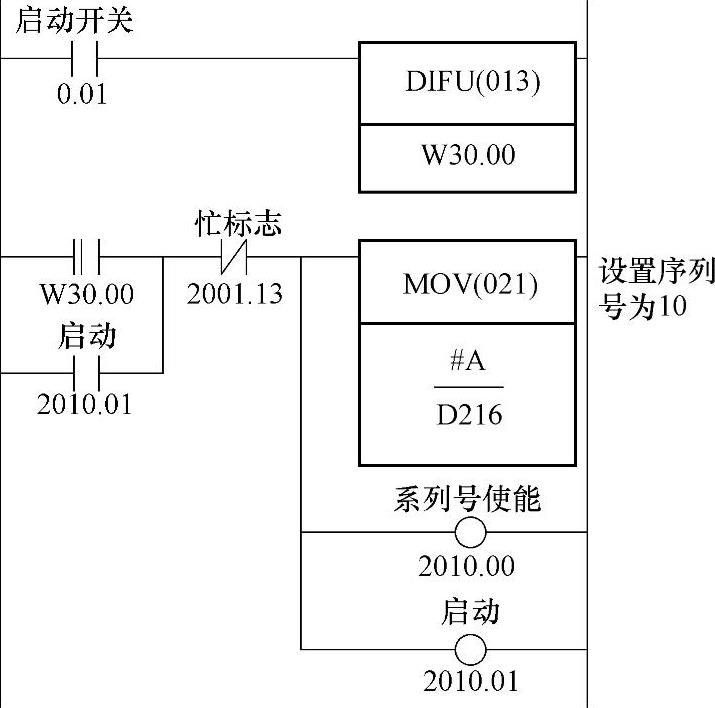
图5-95 起动定位程序
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。