



本书第4章4.9.4节介绍传送带的模糊控制,实际也是速度同步的控制。以下介绍的是使用脉冲技术实现同步控制。
1.速度同步控制
要求输出的脉冲频率保持与输入的脉冲频率一致。办法是先读入脉冲频率,然后按读入的频率起动输出。其程序如图5-72所示。
这里只有两个工作指令。一是PRV,读跟踪的输入脉冲频率,并测得的频率存储于D0中。另一是SPED,按跟踪得知的频率,D0值,连续输出脉冲。
2.位置同步控制
(1)同时输出脉冲。同时向目标对象与跟踪对象输出相同的脉冲,靠脉冲驱动系统实现同步。这样的同步控制其实就是单一控制的重复。开环直线插补实质上就是开环位置同步控制。不同的只是它的位置移动比例可以调整。
(2)程序同步。边测量目标对象位置,边向跟踪输出脉冲,以达到两个运动同步。图5-73所示为一个同步处理程序。
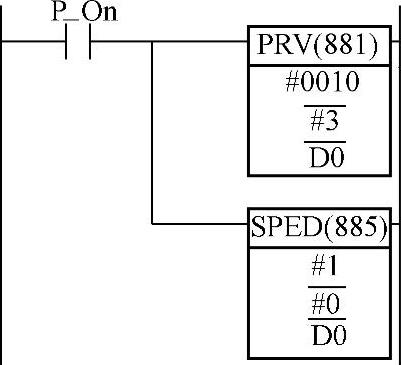
图5-72 程序跟踪
这个程序每间隔一定时间采集一次检测到的目标运动时输入脉冲现值。D0、D1用一存储采集反映目标位置的脉冲输入值。D10、11用于暂存此值。用这两个比较,确定控制对象运动方向及输出的脉冲数,从而消除两者位置的偏差。只是,这样的位置跟踪在时间上是存在滞后的。但对目标对象另有自己的驱动系统也只好这么处理。
(3)指令跟踪。CPM2A机有(SYNC)指令,执行它,可使脉冲输出与采集到的脉冲输入成一定比例。此指令梯形图格式如下:
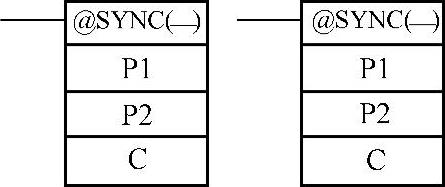
这里的P1为指定脉冲输入口,如设为000,指定点00000为脉冲输入;P2为指定脉冲输出口,如000指定01000点输出,如010指定01001点输出;C为同步因子,BCD码,占一个字。取值为0~1000。其含义为输出脉冲频率与输入脉冲频率之比。
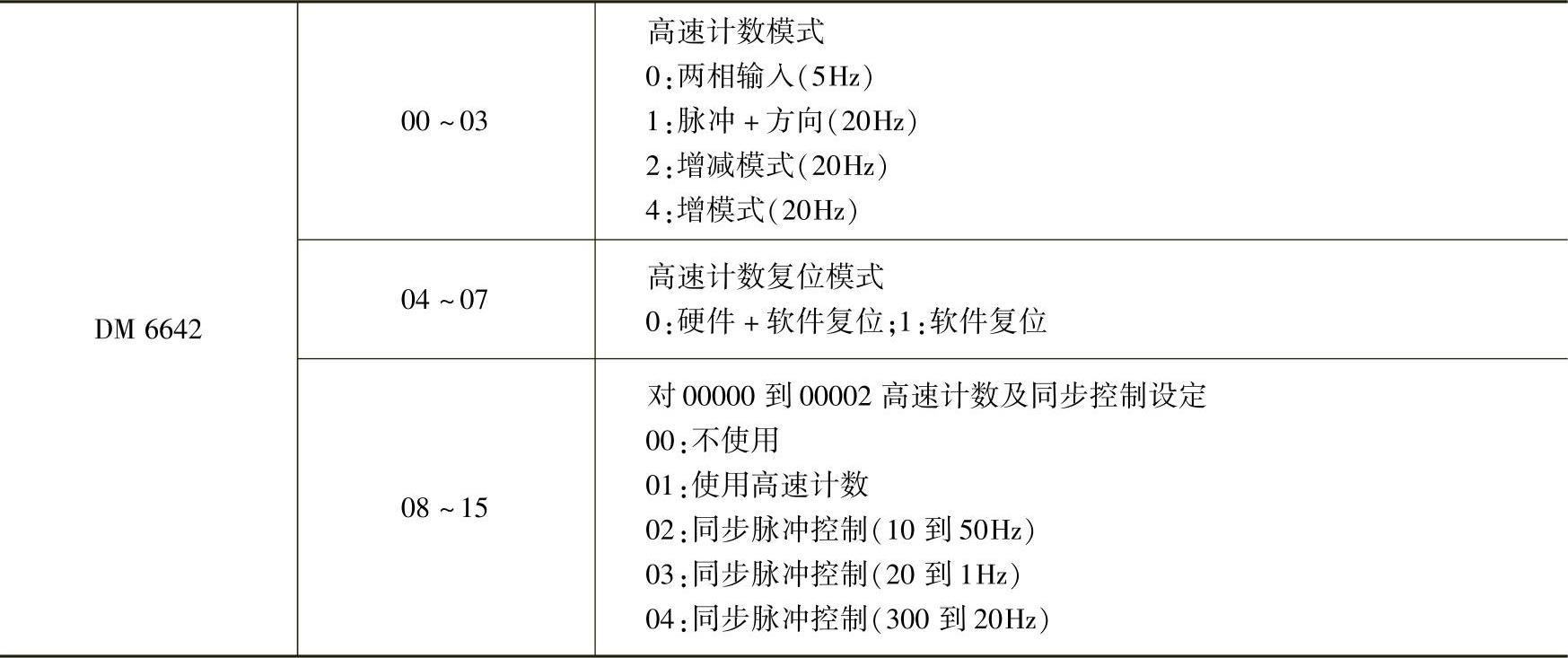
只是,本指令为扩展指令,使用前要指定功能号,并要下载给PLC。在下载前,还要把PLC设置成容许扩展指令功能码下载模式。办法是使DM6602的高字节设为1,否则无法下载。同时,对DM6642的08~15位也要作相应设定。否则本指令无法正确执行。其设定要求如表5-18所示。
3.应用实例
在2008北京奥运会上使用的撑杆跳杆的升降与前后移动,就是典型的双轴位置开环同步控制。图5-74所示为它的使用现场俄罗斯女子跳高名将伊辛巴耶娃,正在破5米05世界纪录摘金的激动场面。(https://www.xing528.com)
从5-72图知,它有两个跳杆立柱,其上各有一个支架。跳杆可在这支架上前后移动。而支架又可沿立柱升降。显然,为了跳杆能正确工作,这两组的移动与升降必须同步。
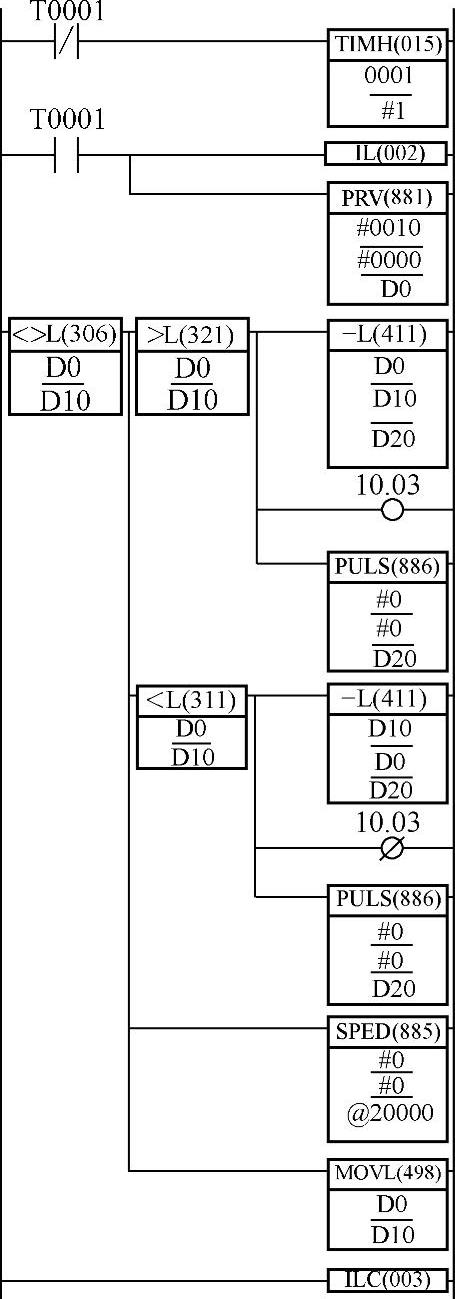
图5-73 同步位置开环跟踪程序
表5-18 DM6642设定
该系统机械部分由泰山体育产业集团生产,运动控制部分由沈阳旭风电子科技开发有限公司研制。系统控制机使用OMRON CP1H PLC,操作界面使用OMRON 5.7in人机界面,伺服系统用松下伺服电动机(含驱动器)及ABBA步进电动机(含驱动器)。
图5-75所示为它的人机界面的一个操作画面。设置好预定高度,再按下触摸屏上的“起动高度”按钮,即可使支架上升到预定的设置高度。设置好预定的架距,再按下触摸屏上的“起动架距”按钮,即可使跳杆前移到设置的架距。按下触摸屏上的“回原点”按钮,则可使支架、跳杆返回到原始位置。

图5-74 撑杆跳杆控制系统使用现场
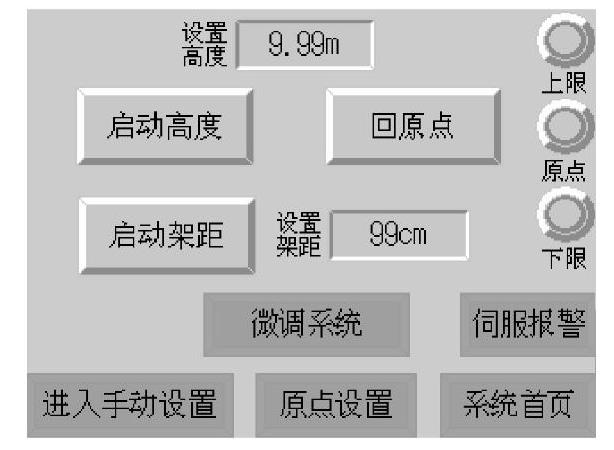
图5-75 操作系统画面
该系统除了处理好硬件,还要编写PLC及人机界面程序。人机界面程序可使用包装在OMRON的CX-one软件中的CX-Designer软件在计算机上编写。编写后下载给人机界面。这类程序的编写将在本书第7章作进一步介绍。
PLC程序要点有,数据处理(考虑传动机构参数,把设定数据转换为脉冲输出)、微调系统(微量移动)、工作输出(根据工作命令输出脉冲)、原点设置(确定基准点)、手动设置(接受人工设定数据输入)、伺服报警(出现运动异常时提示)等。其同步控制较简单,靠两组相同的开环脉冲输出实现。
经过多场奥运大赛证明,这套系统不仅使用方便、工作可靠,而且跳杆的升降速度达0.8米每秒,为国内外同类产品的4倍。深受运动员、裁判员的好评。为北京实现科技奥运的承诺作了贡献。
提示:高性能的伺服电动机也有位置跟踪功能。也可用以实现位置同步。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。