



脉冲信号执行与系统的功能与配置有关。如果用脉冲频率大小作为控制输出,则可用FVC(频率到电压)变换。变换为电压信号后,再经功率放大,即可实现各种控制了;如果用脉冲宽度作为控制输出,则可直接或稍作滤波,再经功率放大也可实现各种控制了。脉宽控制输出还可用以控制舵机、机械手。如果用脉冲量及频率去控制运动机构运动,就要用相应的执行机构。有两种机构:一用步进电动机;另一用伺服电动机,如图5-23所示。
以下仅对步进电动机与伺服电动机作简要介绍。
1.步进电动机
步进电动机是将脉冲信号转换成角位移或线位移的控制电动机。它用专用的驱动电源,提供一系列有规律的电脉冲信号。其角位移与脉冲数成正比,电动机转速与脉冲频率成正比,而且转速和转向与各相绕组的通电方式有关。
(1)原理。图5-24是三相反应式步进电动机的结构示意图。
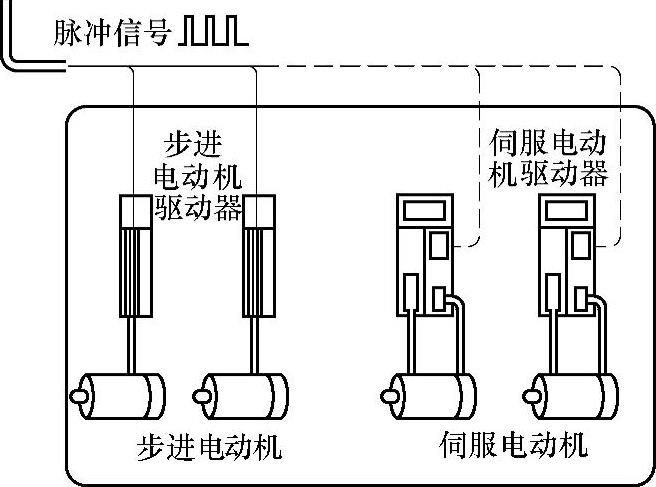
图5-23 脉冲信号执行机构
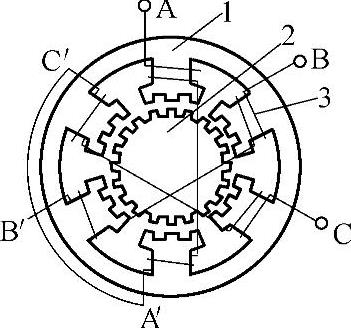
图5-24 三相反应式步进电动机的结构示意图
1—定子 2—转子 3—定子绕组
从图5-24知,电动机的定子上有6个均布的磁极,其夹角是60°。各磁极上套有绕组,连成A、B、C三相绕组。转子上均布40个小齿。每个齿的齿距为θE=360°/40=9°。每个定子磁极也有小齿,但各相有1/3齿距(3°)的错位。若A相磁极齿和转子齿对齐,则B相向前错位1/3齿距,C相向后错位1/3齿距。若B相、C磁极齿和转子齿对齐,其它两相情况也类似。而且,哪个相磁极齿和转子齿对齐,哪个相磁阻就最小。
这样,当A相对齐,给B相通电,B相绕组产生定子磁场,其磁力线穿越B相磁极,力图使转子转动,直到转过3°、使B磁极齿与转子齿对齐。接着,如停止对B相绕组通电,而改为对C相绕组通电,同理,转子按顺时针方向再转过3°。依次类推,当三相绕组按A→B→C→A顺序循环通电时,转子会按顺时针方向,以每个通电脉冲转动3°。若改变通电顺序,按A→C→B→A顺序循环通电,则转子就按逆时针方向转动。
这样通电,称为单三拍方式,步距角θb为3°。也可双三拍方式,即AB→BC→CA→AB顺序循环通电。也还可单、双六拍运行,即按A→AB→B→BC→C→CA→A顺序循环通电。六拍运行的步距角将减小一半。步距角可按下式计算:
θb=360°/NEr (5-1)
式中Er为转子齿数;N为运行拍数,N=km(m为步进电动机的绕组相数;k=1或2,取决于绕组的通电方式)。
(2)种类。除了反应式步进电动机,还有永磁式和感应子式(又叫混合式)步进电动机。反应式步进电动机,除了图5-24所示的结构外,还有其它结构。铁心有单段式、多段式定子;磁路有径向、轴向;绕组相数有三相、四相、五相等等。
反应式步进电动机结构简单,步距角较小(可做到1°,甚至更小),精度容易保证,起动和运行频率高,但效率较低,动态性能差,断电后无定位力矩。
永磁式步进电动机出现在20世纪80年代初。它出力大,动态性能好,但步距角大。
混合式步进电动机综合了反应式、永磁式步进电动机两者的优点,图5-25示的为永磁感应子式步进电动机基本结构。
它的定、转子铁心结构与反应式步进电动机相似。转子由左右两段铁心组成,两段铁心轴向错开半个齿距,中间嵌有永磁铁。这样,在永磁铁S端的铁心呈S极,永磁铁N端的铁心呈N极。当定子绕组激励时,S极的转子铁心小齿与定子N极1、5小齿相对,而与定子S极3、7小槽相对;在转子N极的右段铁心则正相反。
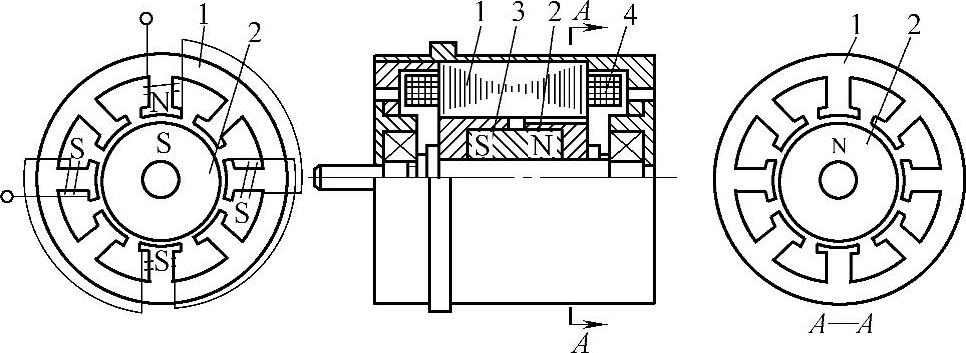
图5-25 永磁感应子式步进电动机基本结构
1—定子 2—转子 3—永磁铁 4—绕组
当绕组1、3、5、7断电,绕组2、4、6、8通电时,定子2、6呈N极,4、8呈S极。这时,S极的转子铁心小齿与定子2、6小齿相对,而与定子4、8小槽相对,转子顺时针转动了1/4齿距的角度;同样,N极的转子铁心段也同方向转动了1/4齿距的角度。
永磁感应子式步进电动机兼有永磁式步进电动机与反应式步进电动机两者的优点,步距角小,精度高,工作频率高,且功耗小,效率高。
(3)特性。定子相励磁时,步进电动机产生一个静转矩(即电磁转矩),对永磁式步进电动机,转子被推到和定子磁场一致的位置方向;对反应式或永磁感应子式步进电动机,转子转到磁路磁阻最小的位置方向。这个转矩大小按一定周期变化。图5-26示的为反应式步进电动机的矩角特性曲线。图中p为转子极对数。
这一特性曲线表示了在单脉冲及通电电流不变情况下,步进电动机静转矩与转子角位移之间的关系。永磁式步进电动机的矩角特性基本上是正弦的,反应式步进电动机的矩角特性基本上是非正弦的。
矩角特性对步进电动机的运行十分重要。是步进电动机的基本特性。它表示若有一足够大的外转矩,使转子偏离起始点足够远,这时静转矩降低,转子将不再能回到最初的起始点,而移到新的平衡位置。
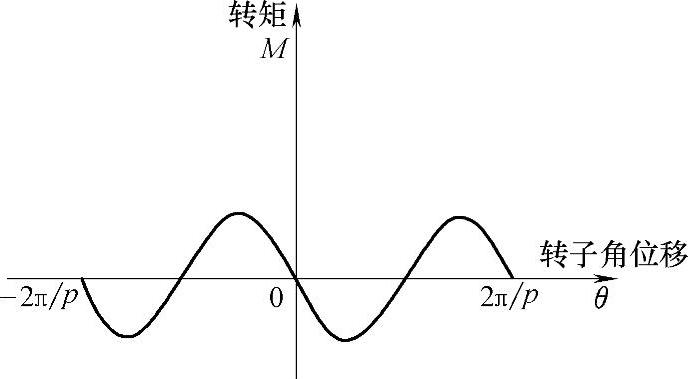
图5-26 反应式步进电动机的矩角特性曲线
步进电动机从第一个脉冲信号的通电状态转换到第二个脉冲信号的通电状态,矩角特性曲线也由原来的特性曲线转变到新的特性曲线。随着控制频率的增加,电动机的电磁转矩将降低。在负载惯量一定时,控制频率与负载转矩间的关系称矩频特性,它包括起动矩频特性和运行矩频特性。
步进电动机矩角特性中的转矩越大,带负载转矩和加速负载转矩的能力就越大。然而,这将使转子转动惯量增加,定子绕组电流增大。电流大,使定子热损耗增加。
步进电动机的这些特性在选用时是必须考虑的。
(4)细分。以上介绍的步距角,其实不一定是步进电动机实际工作时的真正步距角。真正的步距角还与驱动器有关,可通过驱动器对其“细分”。电动机出厂时给出了一个步距角的值,如86BYG250A型步进电动机给出的值为0.9°/1.8°(表示半步工作时为0.9°、整步工作时为1.8°),这个步距角可以称之为步进电动机固有步距角,但对其细分后的步距角要小些。表5-14示的为86BYG250A步进电动机固有步距角与真正步距角的对应关系。
表5-14 86BYG250A步进电动机固有步距角与真正步距角对应关系

从表5-14可以看出:步进电动机通过细分驱动器的驱动,其步距角变小了。如驱动器工作在10细分状态时,其步距角只为步进电动机固有步距角的1/10。也就是说:当驱动器工作在不细分的整步状态时,控制系统每发一个步进脉冲,步进电动机转动1.8°;而用细分驱动器工作在10细分状态时,步进电动机只转动了0.18°。
细分功能完全是由驱动器靠精确控制步进电动机的相电流所产生的,与步进电动机无关。细分后的主要优点是:可消除步进电动机的低频振荡;可提高了步进电动机的输出转矩,尤其是对三相反应式步进电动机,其转矩比不细分时提高约30%~40%;可提高了步进电动机的分辨率,由于减小了步距角、提高了步距的均匀度。
(5)选用。主要考虑步距角、静转矩及电流三大要素。
1)步距角的选择。考虑细分后应等于或小于与每个脉冲当量对应的步进电动机转角。
2)静转矩的选择。选择的依据是步进电动机负载,而负载可分为惯性负载和摩擦负载两种。直接起动时两种负载均要考虑,加速起动时主要考虑惯性负载,恒速运行只要考虑摩擦负载。一般情况下,静转矩应为摩擦负载的2~3倍。
3)电流的选择。可根据矩频特性曲线,选择步进电动机的电流。
4)转矩与功率换算。步进电动机一般在较大范围内调速使用、其功率是变化的,一般只用转矩来衡量,转矩与功率换算如下:
P=Ω·M
Ω=2π·n/60
P=2πnM/60
式中P为功率(W),单位为瓦,Ω为角速度(rad),n为每分钟转速;M为转矩(N·m)。
P=2πfM/400(半步工作)
式中f为每秒脉冲数(简称PPS)。
(6)注意事项。根据使用者的经验,选用与使用步进电动机有若干注意事项,现转录如下,供参考。
1)步进电动机应用于低速场合,每分钟转速不应超过1000r,不然可通过减速装置使其在此转速下工作。因在此转速下时步进电动机工作效率高,噪声低。(https://www.xing528.com)
2)步进电动机最好不使用整步状态,整步状态时振动大。
3)由于历史原因,只有标称为12V电压的步进电动机使用12V外,其它步进电动机的电压不是驱动电压。实际可根据驱动器选择驱动电压(建议:对57BYG采用直流24~36V,对86BYG采用直流50V,对110BYG采用高于直流80V),当然12V的电压除12V恒压驱动外,也可以采用其它驱动电源,不过要考虑温升。
4)转动惯量大的负载应选择大机座号电动机。
5)步进电动机用在高速或大惯量负载时,一般不在工作速度下起动,而采用逐渐升频提速,以避免步进电动机失步、减少噪声,同时可提高定位精度。
6)高精度时,应通过机械减速,提高电动机速度。
7)步进电动机不应在振动区内工作,否则可改变电压、电流或增加阻尼。
8)步进电动机在600脉冲/s(0.9°)以下工作,应采用小电流、大电感、低电压驱动。
9)应先选步进电动机,后选驱动方式。
(7)除了旋转步进电动机,还有直线步进电动机。直线步进电动机有反应式和索耶式两类。索耶式直线步进电动机如图5-27所示。
从图5-27可知,它由静止部分(称为反应板)和移动部分(称动子)组成。反应板由软磁材料制成,在它上面均匀地开有齿和槽。步进电动机的动子由永久磁铁和两个带绕组的磁极A和B组成。动子是由气垫支承,以消除在移动时的机械摩擦,使步进电动机运行平稳并提高定位精度。这种步进电动机的最高移动速度可达1.5m/s,加速度可达2g,定位精度可达20μm以上。
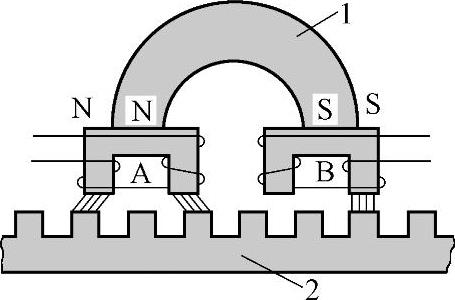
图5-27 索耶式直线步进电动机
1—动子 2—反应板
由两台索耶式直线步进电动机相互垂直组装就构成平面电动机,如图5-28所示。给x方向和y方向两台电动机以不同组合的控制电流,就可以使电动机在平面内做任意几何轨迹的运动。大型自动绘图机就是把计算机和平面电动机组合在一起的新型设备。平面电动机也可用于激光剪裁系统,其控制精度和分辨率可达几十微米。
(8)内装转子位置传感器的步进电动机。传统的步进电动机是开环工作的。但为了可靠,新型步进电动机有的也内装位置传感器。有此传感器,再通过闭环控制,在其运转过程,可对转速及转量进行监控。如发生连续过载时,还会报警。即使在剧烈的负载变化或急速加速的情况下也不会失步。图5-29所示的就是该步进电动机工作原理框图。
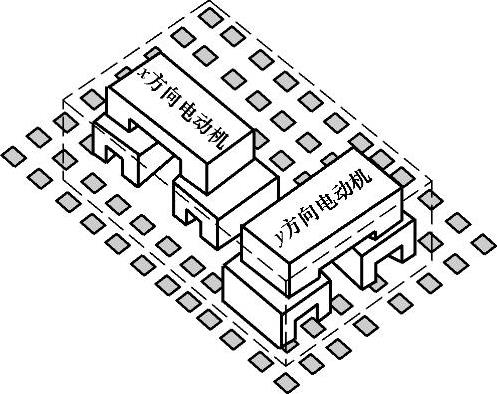
图5-28 平面电动机
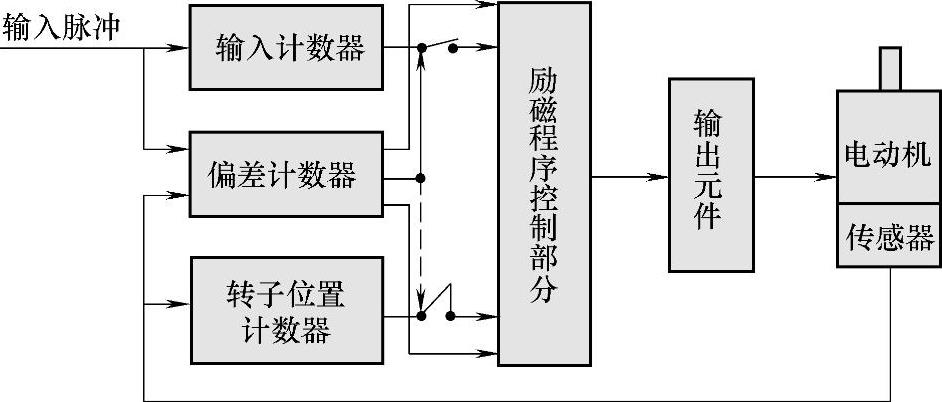
图5-29 内装转子位置传感器的步进电动机原理框图
2.伺服电动机
(1)概述。伺服电动机又称为执行电动机。其功能是将电信号转换成转轴的角位移或角速度,分交、直流两类,主要用于辅助运动控制。
直流伺服电动机具有良好的线性调节特性及快速的时间响应。20世纪70年代以来,直流伺服电动机应用非常广泛。近年来,交流伺服技术进步很快,已用得越来越多,但在有些方面还是直流伺服电动机较适用,比如:需要高度平滑的运转,特别是在低速时;需要高速度(>5000r/min);需要特别的速度稳定性;较恒定的力矩;需要直流电源输入的场合。当然它在缺点方面也很明显,如有刷伺服电动机要维护更换电刷(无刷伺服电动机目前功率一般较小,性能不如有刷伺服电动机);一般不用于高精度位置控制,用于速度和力矩控制较合适。
交流伺服电动机工作原理与交流异步电动机相同。定子上有两个相空间位移90°电角度的励磁绕组Wf和控制绕组Wc。励磁绕组Wf接一恒定交流电压,利用施加到控制绕组Wc上的交流电压或相位的变化,达到控制伺服电动机运行的目的。
交流伺服电动机常用的转子结构有笼型和非磁性杯形。笼型转子与异步电动机的笼型转子结构相似,但较细长,其励磁电流小,功耗低,体积小,机械强度高,广泛应用于交流控制系统。非磁性杯形转子是用非磁性金属如铝、紫铜等制成。这种转子惯量小,运行平稳,噪声小,灵敏度高,主要用于一些要求运行平滑的系统。交流伺服电动机分为同步型和异步型AC伺服电动机两种。永磁转子的同步伺服电动机由于永磁材料不断提高,价格不断下降,控制又比异步伺服电动机简单,容易实现高性能的缘故,所以永磁同步电动机的AC伺服系统应用更为广泛。
伺服电动机实际上可组成一个闭环运动控制系统,除了电动机,还有驱动器。驱动器是电力电子电路。接收脉冲或电压信号,生成驱动伺服电动机的工作电源,使伺服电动机转动,同时接收来自伺服电动机的反馈信号。
伺服电动机除了动力部分,接受驱动器电源作用而转动,同时还有反馈器件,可间接把位置、速度、转矩等信号回馈给驱动器。
目前常用的位置和速度检测反馈器件有光电式和电磁式两种。例如光电编码器、磁编码器、旋转变压器(BR)以及多转式绝对值编码器。后面两种,可作多种检测功能应用,既可检测系统位置和转子转速,又可检测转子磁极位置。它坚固耐用,不怕振动,耐高温,惟存在信号处理电路复杂缺点。
正因为伺服电动机实际可组成一个闭环运动控制系统,所以功能、性能都比较高,可用于速度控制、转矩控制、位置控制及其组合。
(2)特点。可组成交流伺服电动机的特点有:
1)运行稳定。交流伺服电动机与一般异步电动机相比,具有更大的转子电阻,它的机械特性的斜率都是负值。转速随转矩的增加而均匀下降,因此可在n为0~n0(空载转速)之间稳定运行。这样的机械特性决定了伺服电动机的效率较低。
2)可控性好。两相交流伺服电动机机械特性的斜率为负值,在单相供电时,转矩和转速符号相反,因此,当单相励磁时,伺服电动机不会发生自转现象,即控制信号一旦消失,电动机立即停转。
3)快速响应。控制绕组接到控制信号后,能快速起动,信号消失后,又立即自行制动、停转。一般用机械的和电的两个时间常数来表征,时间常数小,快速响应良好。一般要求电动机具有高堵转转矩、小的转子惯量及电感和电阻的比值。
4)灵敏度高。伺服电动机具有小的起动电压。起动电压指的是在额定励磁电压下,加于控制绕组以使电动机开始连续转动的最小电压。起动电压愈低,则灵敏度愈高,系统的不灵敏区愈小。一般起动电压应小于额定电压的3%~4%。
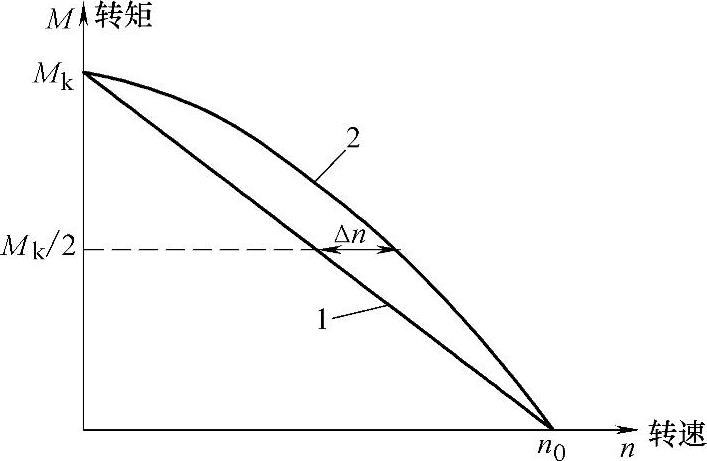
图5-30 交流伺服电动机机械特性的非线性度
1—实际机械特性 2—线性机械特性
5)机械特性和调节特性的非线性度指标严格。机械特性的非线性度Km是指在额定励磁电压下,对任意控制电压时的实际机械特性与线性机械特性在转矩M等于Mk/2时的转速差Δn(图5-30所示为交流伺服电动机机械特性的非线性度)与空载转速n0之比的百分数,即Km=Δn/n0×100%。Km要求小于10%~15%。
机械特性的非线性度Kr是指在额定的励磁电压和恒定的转矩下,当实际控制电压的百分值ae等于0.7时,实际机械特性与线性机械特性转速差Δn与空载转速n0之比的百分数,即Kr=Δn/n0×100%。Kr要求小于15%~25%。
直流伺服电动机,其工作原理与一般直流电动机相同,其转速n为
n=E/(K1Φ)=(Ua-IaRa)/(K1Φ)
式中,K1为常数。改变电枢电压Ua或改变磁通Φ,均可控制直流伺服电动机的转速,但一般采用控制电枢电压的方法。在永磁式直流伺服电动机中,励磁绕组被永久磁铁所取代,磁通Φ恒定。
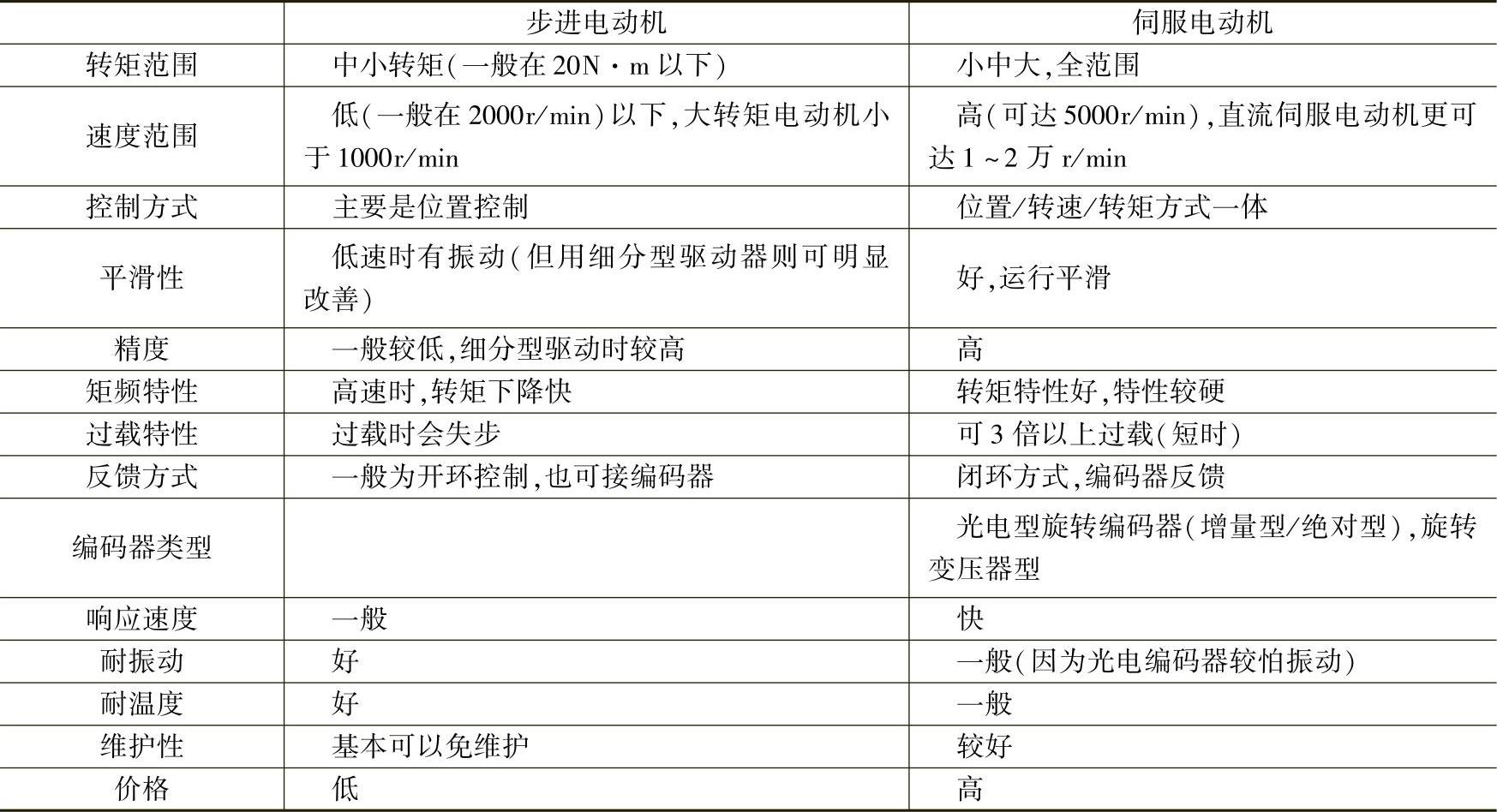
(3)选用。选用步进电动机,还是选用伺服电动机,是首先要考虑的。应根据具体应用情况而定,因各有其特点,可参考表5-15进行选择。
如果选用伺服电动机,应注意如下问题:
1)伺服电动机的最高转速应严格控制在电动机的额定转速之内。
2)为了保证足够的角加速度使系统响应灵敏和满足系统的稳定性要求,负载转动惯量JL应限制在2.5倍伺服电动机转动惯量JM之内。
表5-15 步进电动机与伺服电动机比较
3)空载加速转矩一般应限定在变频驱动系统最大输出转矩的80%以内。
4)在正常工作状态下,负载转矩不应超过伺服电动机额定转矩的80%。
5)连续过载时间应限制在伺服电动机规定过载时间之内。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。