



中、大型PLC输出脉冲,使用位置控制单元或运动单元。这些单元有自己的CPU、内存及输出与输入点。通过与PLCCPU交换数据,或预先设定,可确定通过哪个输出口发送脉冲、送多少脉冲及脉冲的频率多大等问题。确定之后,这些单元可自行工作。所以,这类PLC就没有自身的脉冲输出口及脉冲输出指令。有关这些单元将在本章第5.6节作简要介绍。
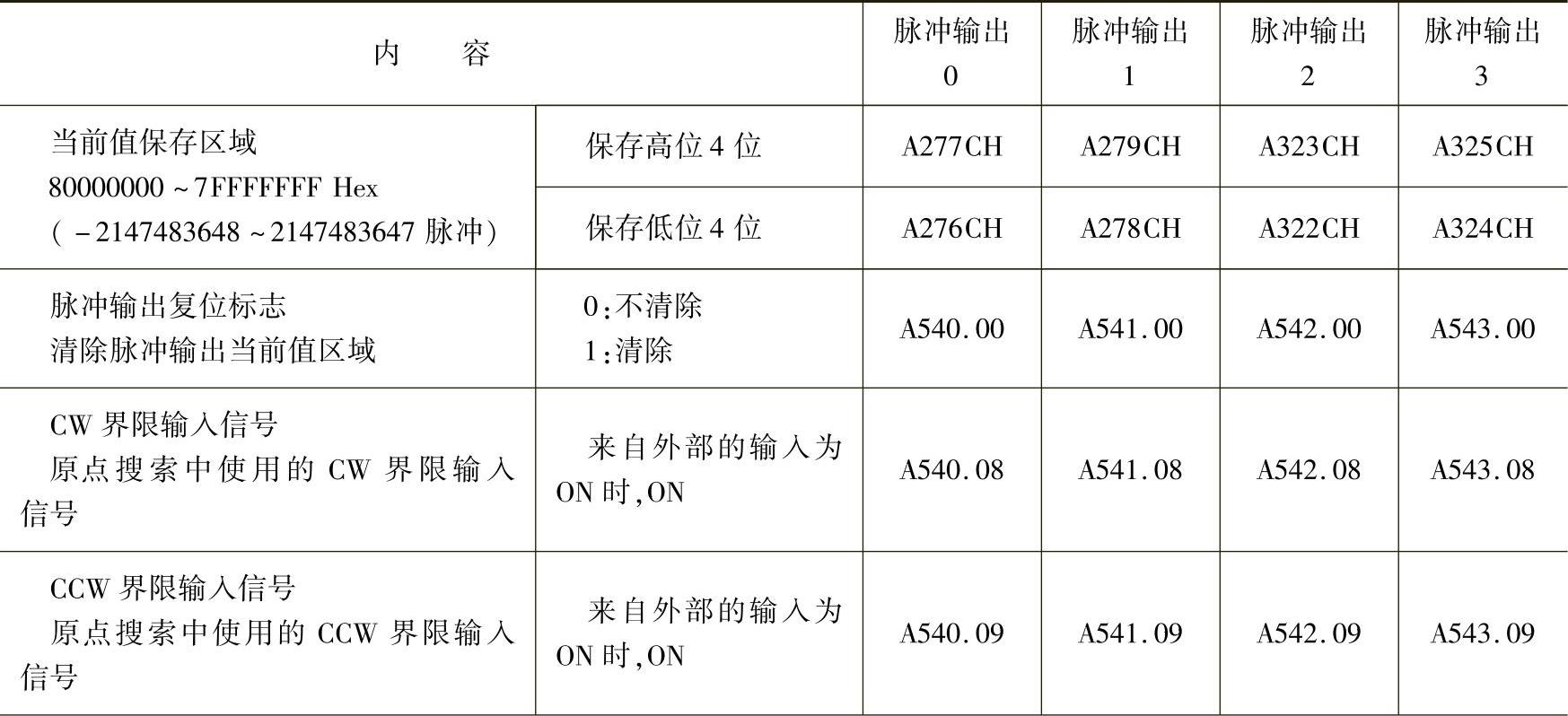
小型PLC可指定多个输出点输出脉冲,如CP1H机有2个脉冲输出口,如果为Y型PLC则有4个输出口。此外,还有2个可调制脉宽输出口,如图5-17所示。表5-4所示为脉冲输出使用的辅助继电器。
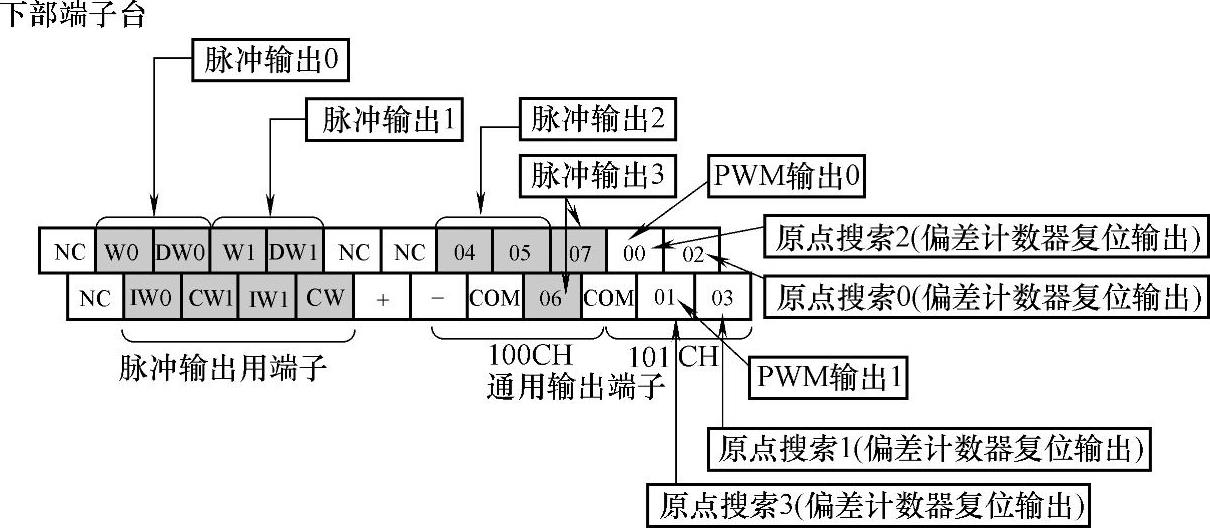
图5-17 CP1HY型PLC脉冲输出点分布
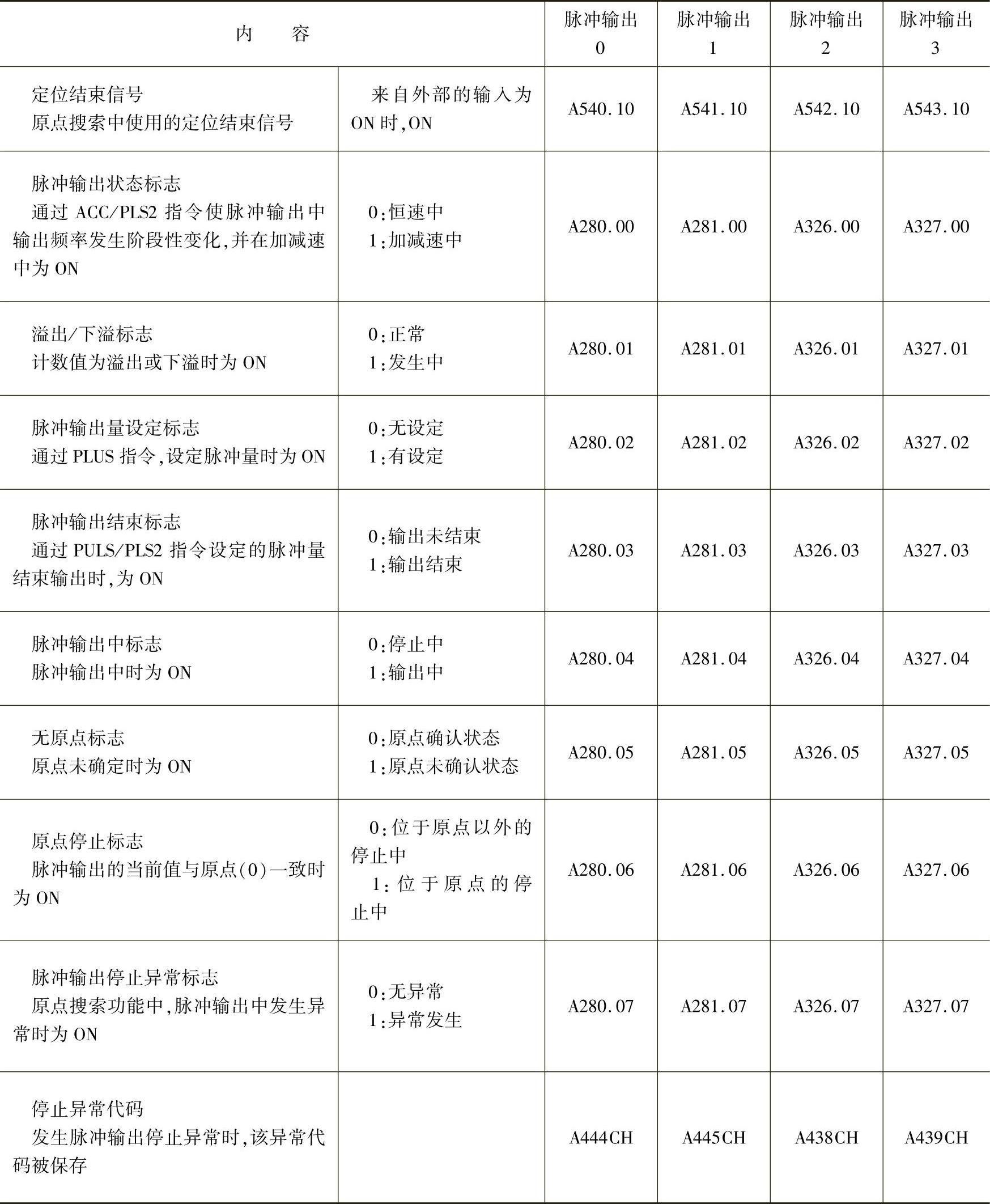
表5-4 CP1H机脉冲输出使用辅助继电器
(续)
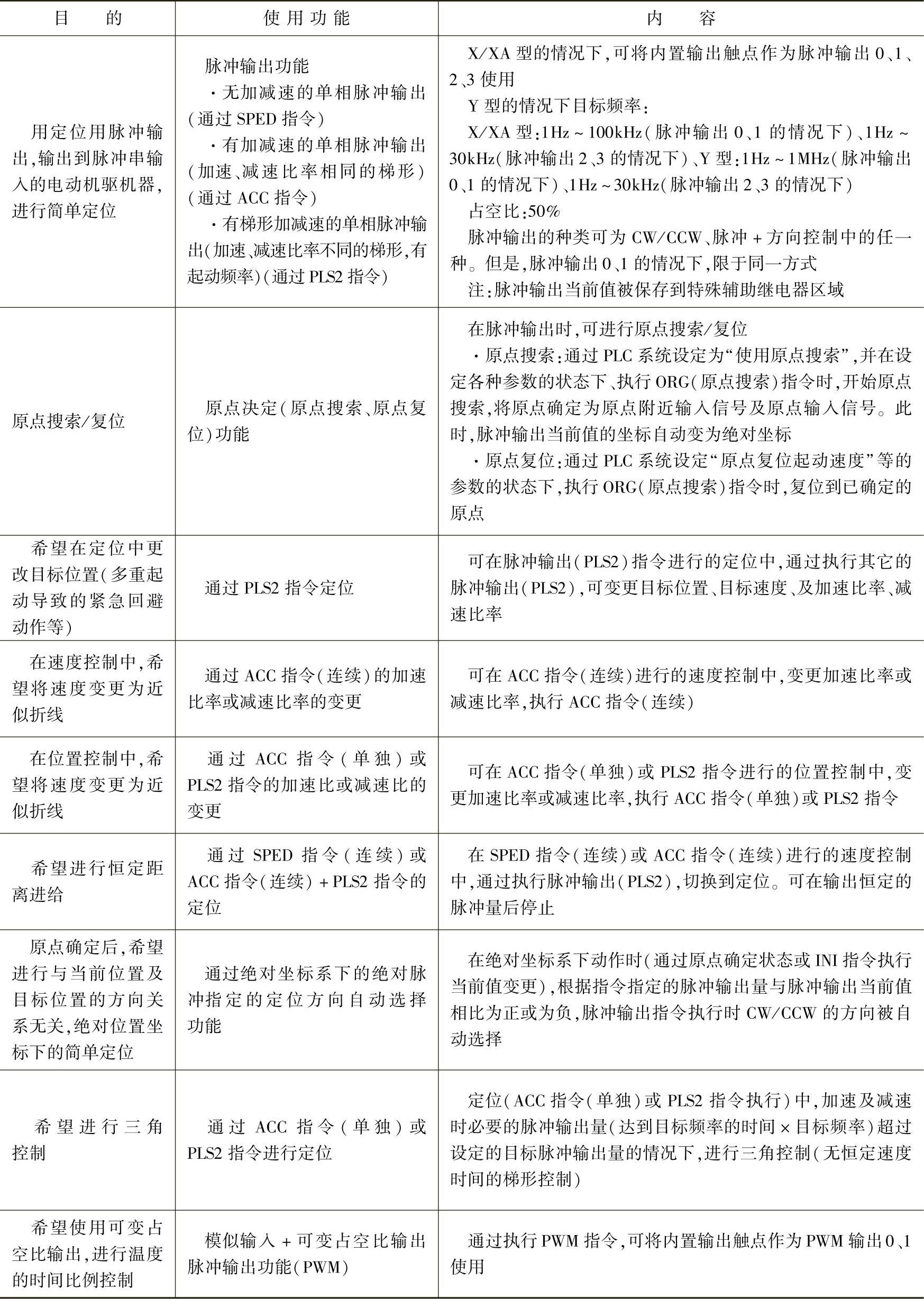
CP1H机可实现的脉冲输出功能有:根据驱动器的特点,选择CW/CCW脉冲输出或脉冲+方向输出;在绝对坐标系中,可自动选择CW/CCW的方向;可加速及减速输出脉冲;可变更目标位置、目标速度、加速比率、减速比率;可在速度控制中变更定位;可在加速或减速中变更目标速度、加减速比率;可发出可变占空比脉冲输出信号(PWM)。表5-5所示为CP1H机脉冲输出功能。
表5-5 CP1H机脉冲输出功能
实现这些功能,要使用相应的脉冲输出指令。如CMP2A,除了第4章已介绍PMW指令外,还有设置脉冲PULS指令、频率输出SPED指令、加速控制ACC指令、同步控制SYNC指令。CJ1M机、CP1H机还有功能更强的PLS2指令。以下对这些指令作简要介绍。只是要注意,这些指令的细节可能随着机型、版本的不同而有所不同。建议使用前可先做些测试。
1.PULS指令
本指令用以设定输出的脉冲数。其梯形图格式如下:
这里,C1用以指定输出口。C2为控制数据。S、S+1输出脉冲数设定。这些指令参数含义及选用见表5-6。
表5-6 PULS指令参数的含义及其选用
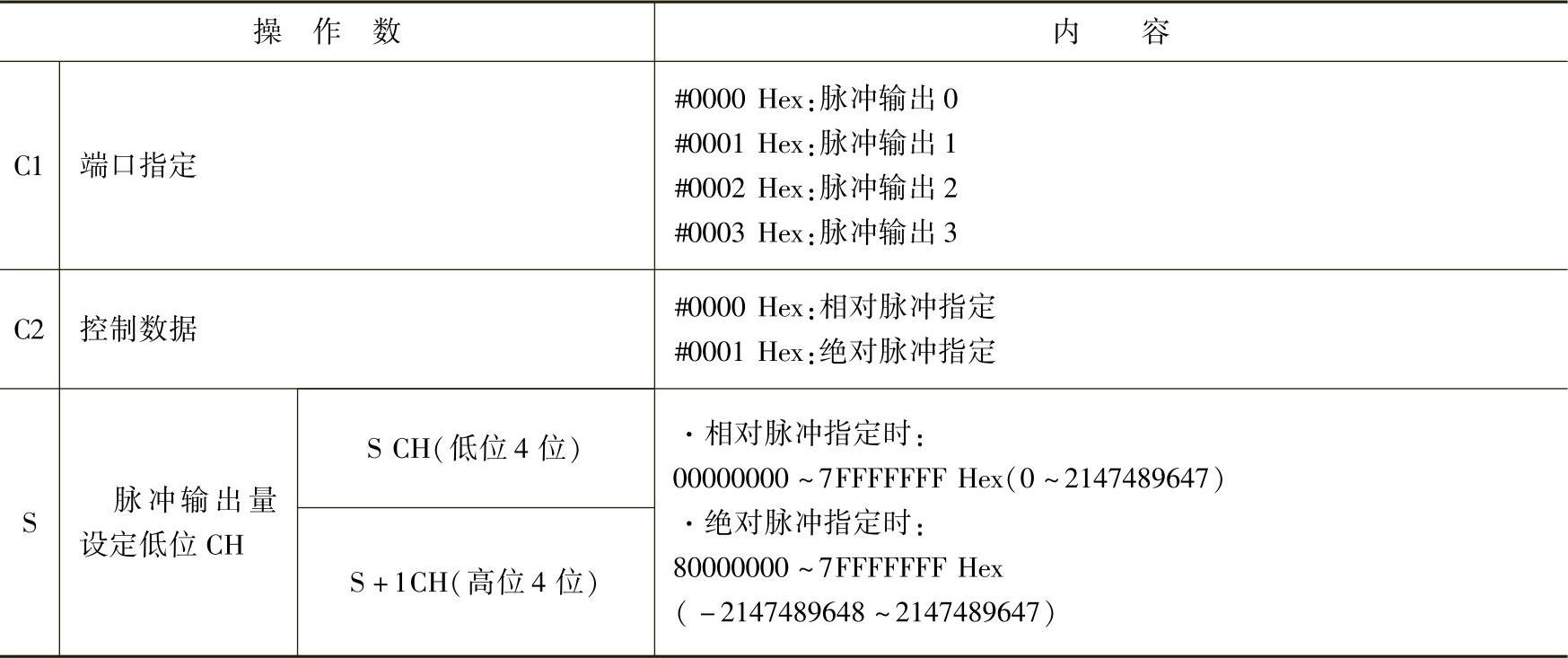
实际的输出脉冲数与相对或绝对脉冲有关。相对脉冲指定时为
移动脉冲量=脉冲输出量设定值
绝对脉冲指定时为
移动脉冲量=脉冲输出量设定值-当前值
脉冲输出中不能进行脉冲输出量的再设定,这时执行PULS指令时为出错。因此本指令只能采用输入微分执行。
2.SPED指令
本指令用以指定要输出的脉冲频率,并起动脉冲输出。其梯形图格式如下:
这里,C1为指定端口。C2为指定输出模式。S、S+1指定目标频率,如设为0,指定脉冲输出停止。这些指令参数含义及选用见表5-7。
表5-7 SPED指令参数的含义及其选用
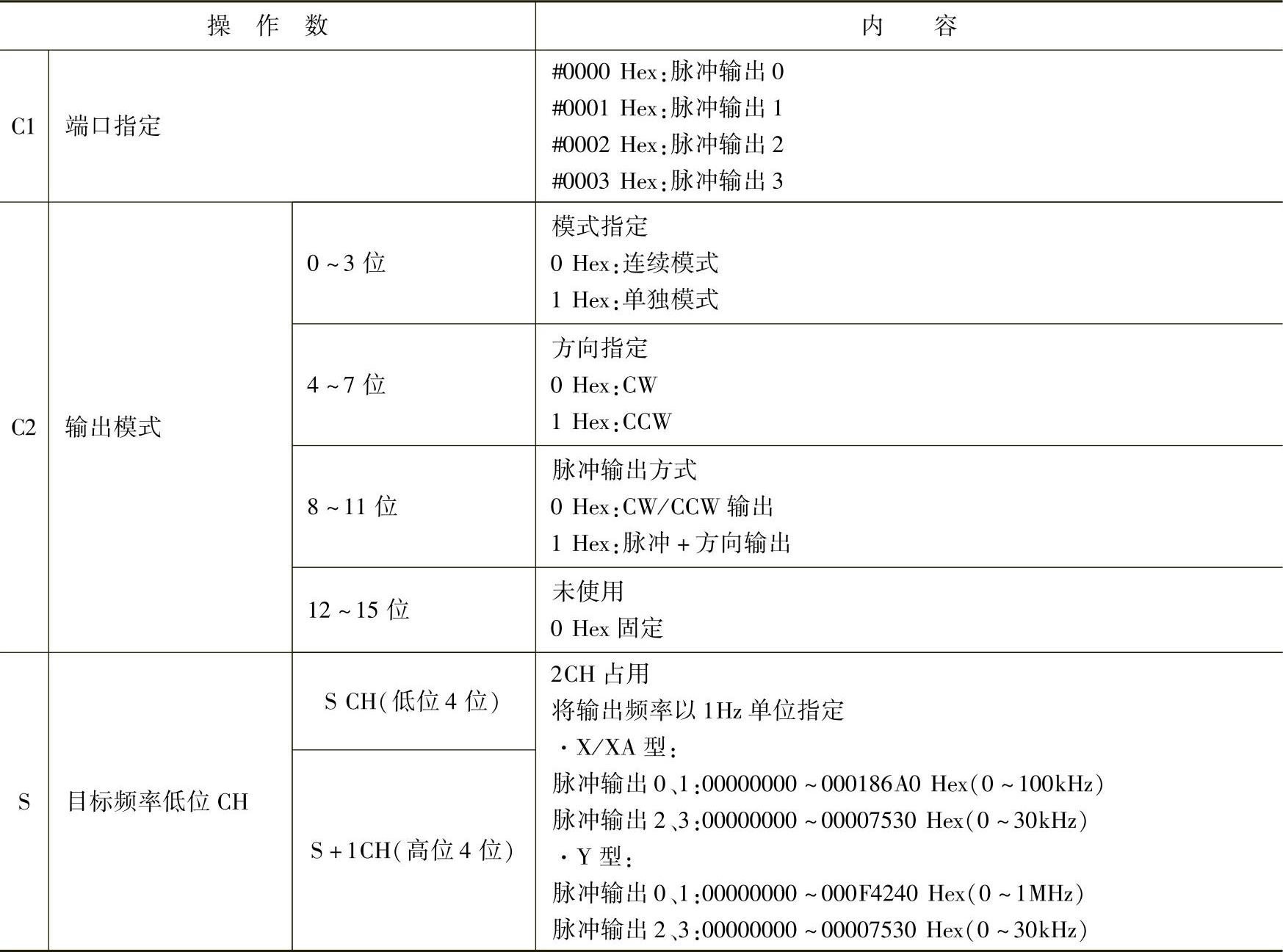
SPED指令的功能是,由C1指定的端口、由C2指定的模式和由S、S+1指定的目标频率输出脉冲。执行一次SPED指令,即输出脉冲。因此基本上在输入微分型(带@)或1周期ON的输入条件下使用。
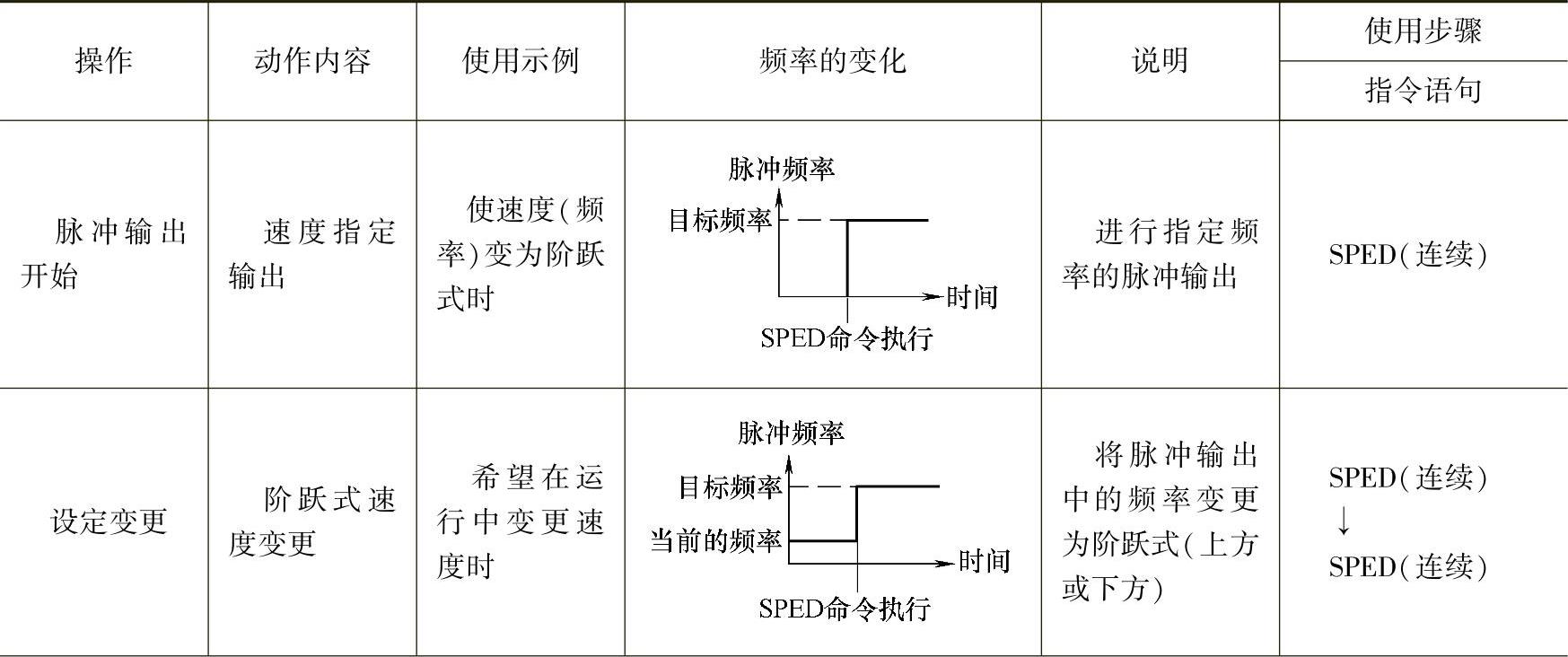
独立模式时,事先由PULS指令设定脉冲量。连续模式时,脉冲输出一直进行到执行停止脉冲输出为止。表5-8及5-9所示分别为连续与独立模式输出的各种应用。
表5-8 连续模式输出
(续)
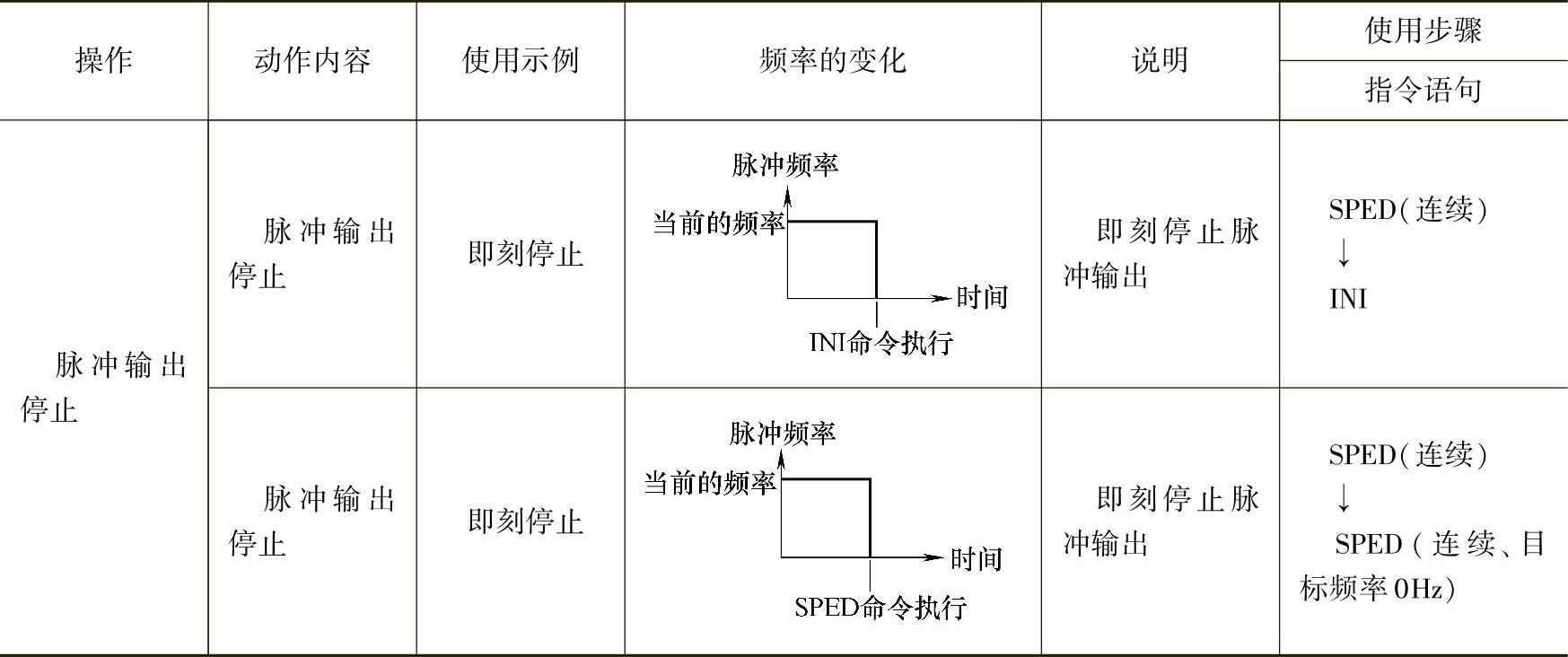
表5-9 独立模式输出
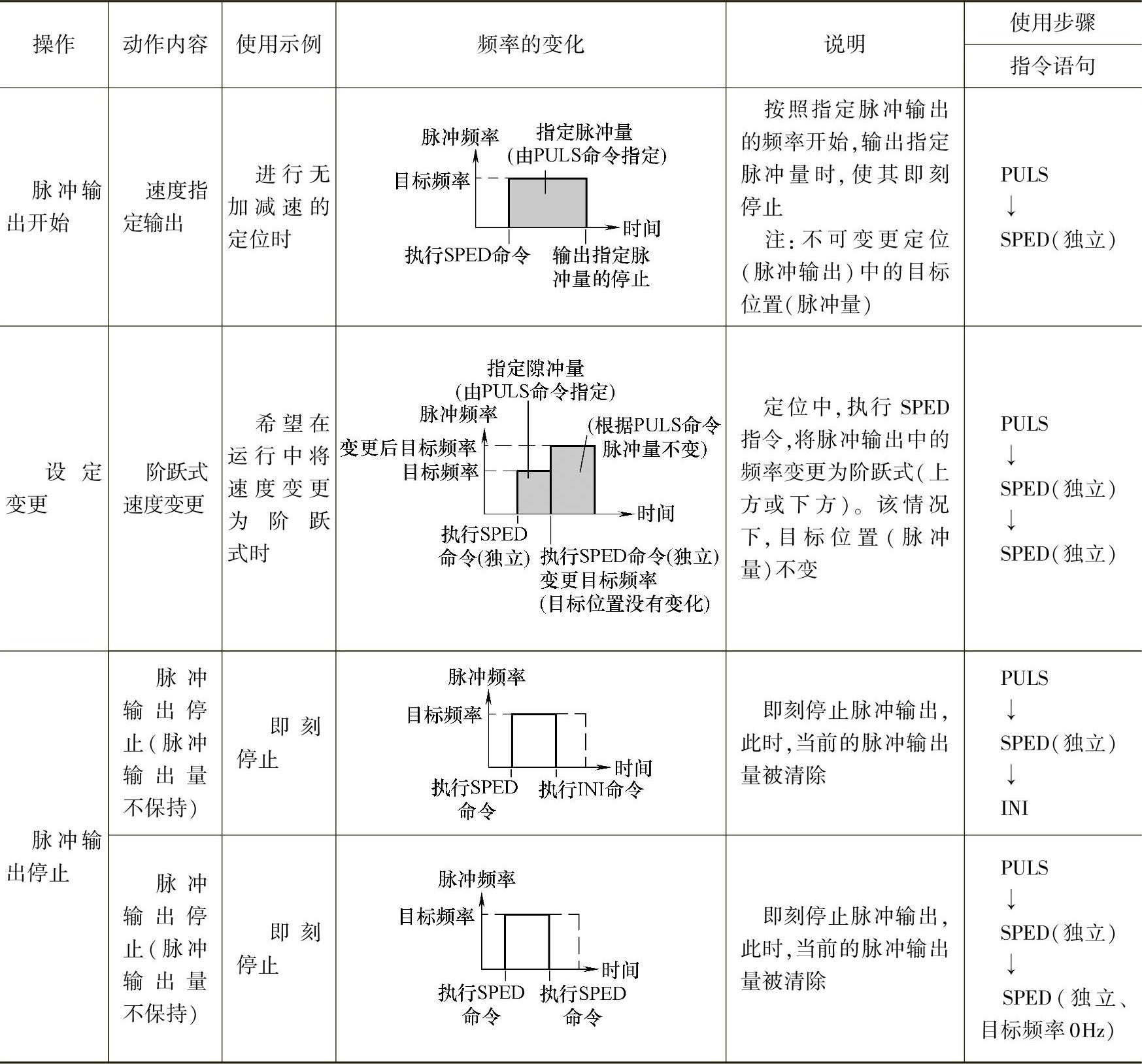
图5-18a所示为SPED指令的一个应用实例。执行本程序,当0.00由OFF→ON时,通过PULS指令由相对脉冲指定将脉冲输出0的脉冲输出量设定为5000脉冲。同时通过SPED指令由CW/CCW输出、CW单独模式开始输出目标频率500Hz的脉冲(设定值如图5-18b所示)。执行效果如图5-18c所示。
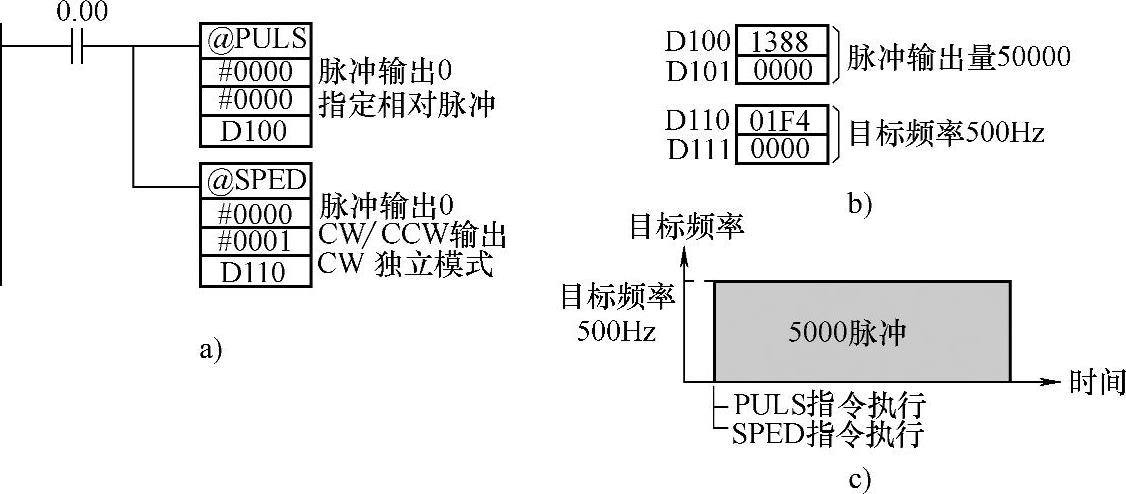
图5-18 SPED指令应用实例
a)应用实例 b)设定值 c)执行效果
3.ACC指令
本指令用以指定输出的脉冲频率按梯形规律增加与减少,并起动输出。其梯形图格式如下:
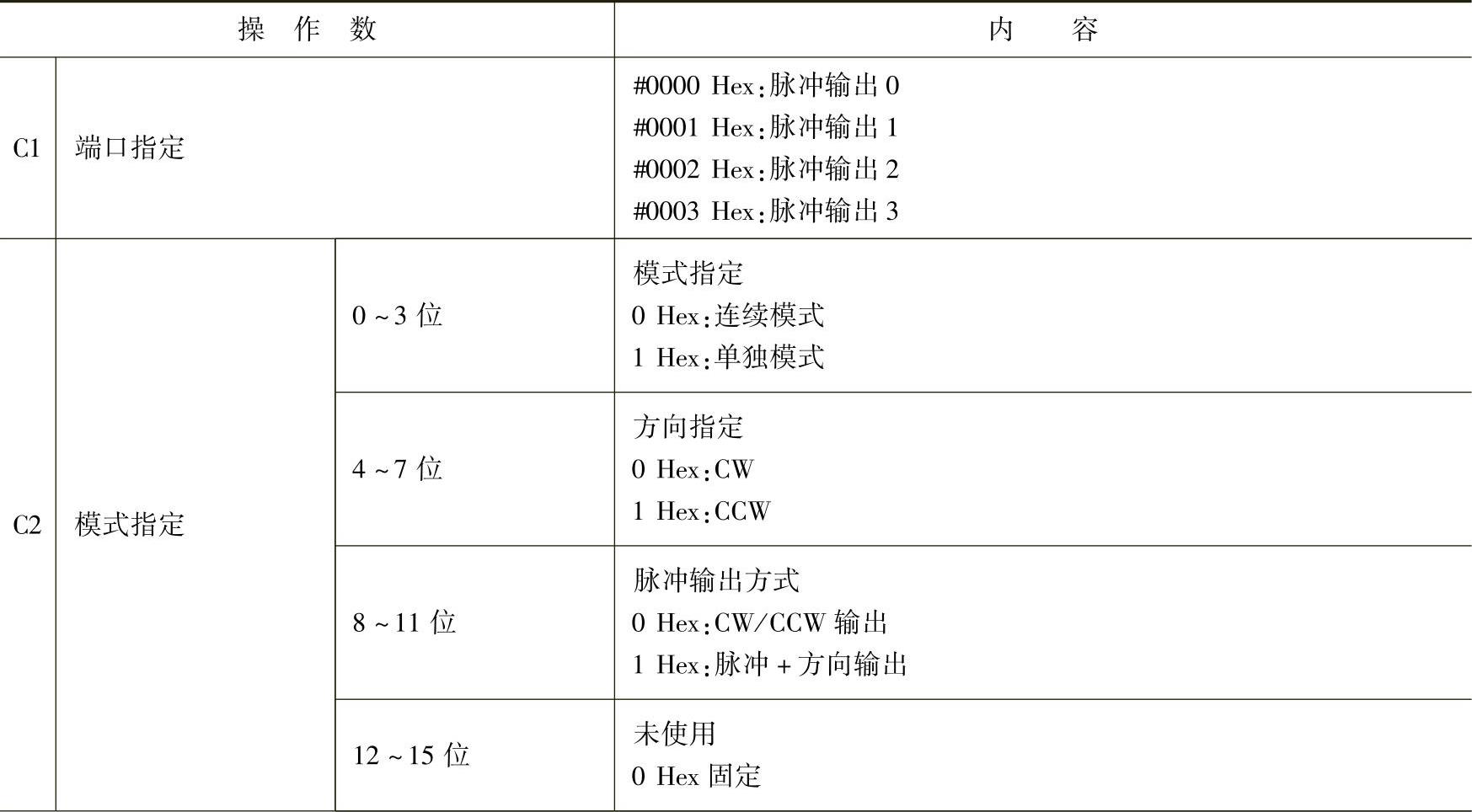
这里,C1用以输出端口指定。C2为操作数。S用以指定加、减速率。这些指令参数含义及选用见表5-10。
表5-10 ACC指令参数的含义及其选用
(续)(https://www.xing528.com)
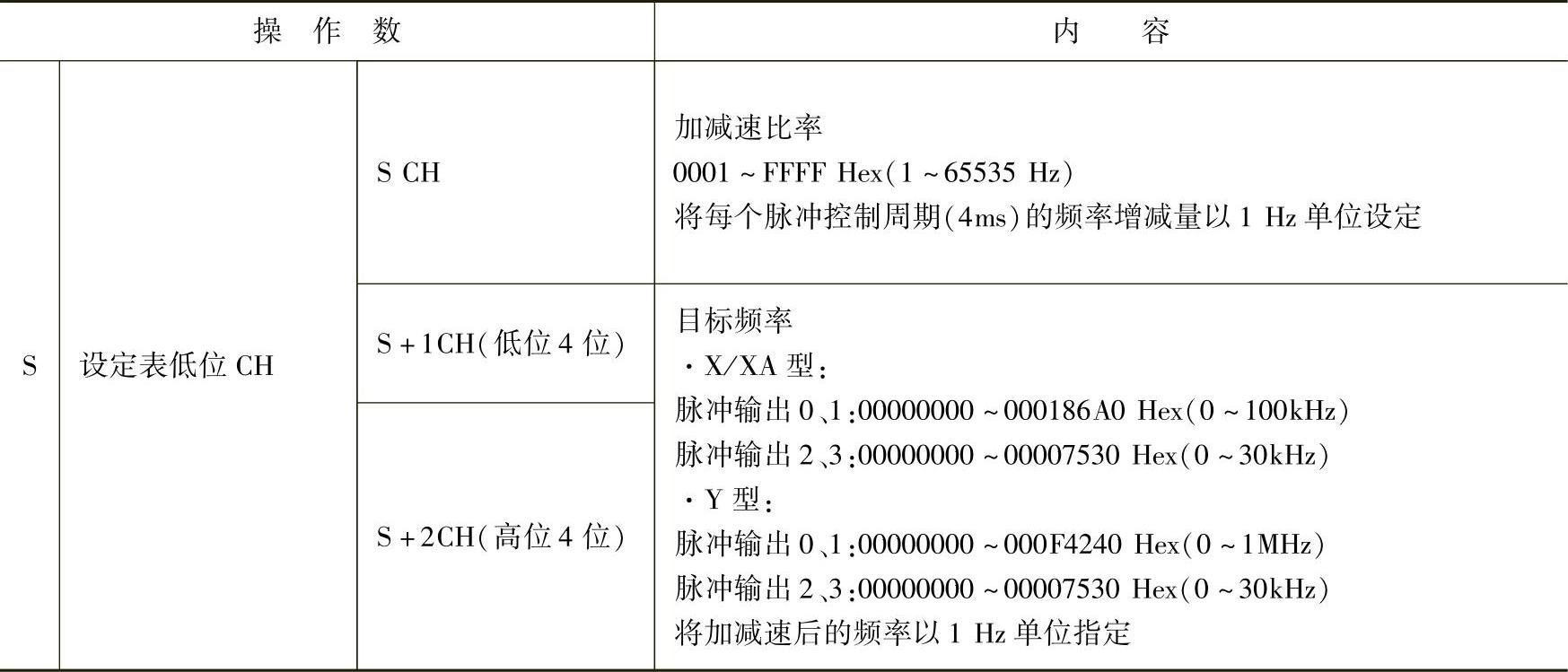
ACC指令的功能是由C1指定端口由C2指定方式由S+1与S+2指定目标频率和S指令加减速比率输出脉冲。在到达目标频率之前,在每个脉冲控制周期(4ms)中,按照加减速比率,进行频率的加减速。图5-19所示的为输出脉冲频率加、减的过程。
执行一次ACC指令,即可按指令输出脉冲。所以,本指令都是微分执行。
独立模式时,输出脉冲数由PULS指令设定。完成脉冲数输出后自动停止。在连续模式中,脉冲输出一直进行到执行停止脉冲输出为止。
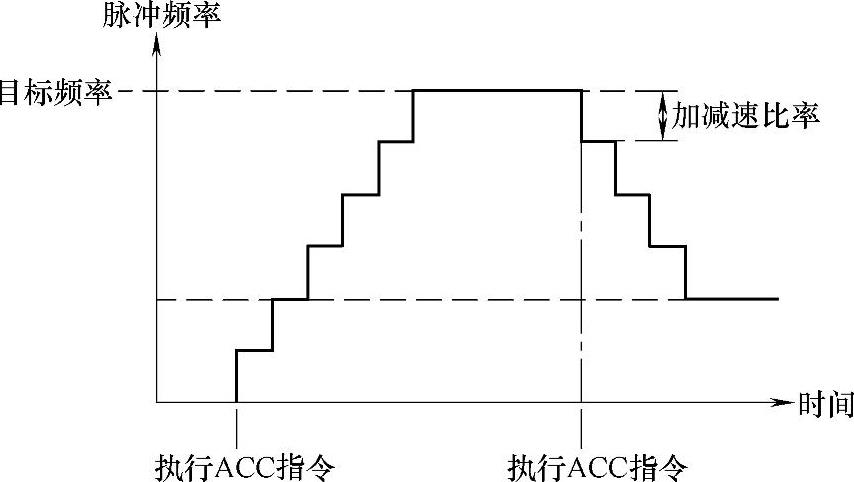
图5-19 输出脉冲频率加、减的过程
图5-20a为ACC指令连续模式输出应用程序实例,设定如图5-20b所示。执行本程序,当0.00由OFF→ON时,从脉冲输出端口0,用CW/CCW输出、CW、连续模式开始进行加减速比率20Hz、目标频率500Hz的脉冲输出。之后0.01由OFF→ON时,再一次通过ACC指令变更为加减速比率10Hz、目标频率1000Hz。图5-20c所示为程序运行结果示意。
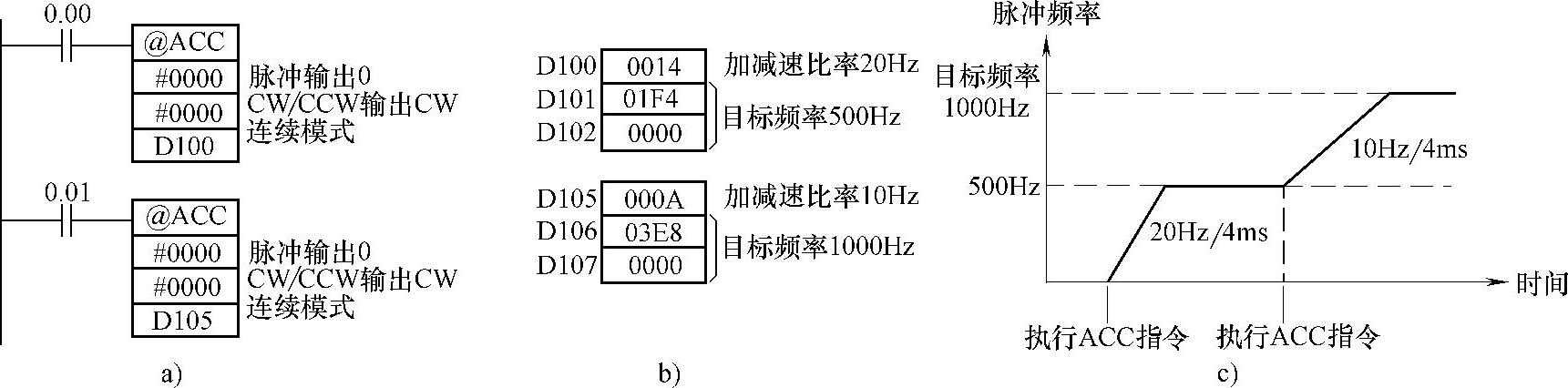
图5-20 ACC指令应用实例
a)应用实例 b)设定值 c)运行结果
4.PLS2指令
本指令用以指定要输出的脉冲数。其梯形图格式如下:
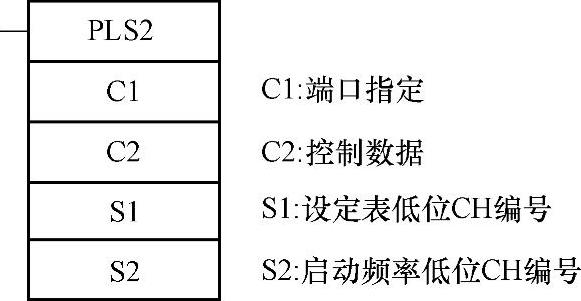
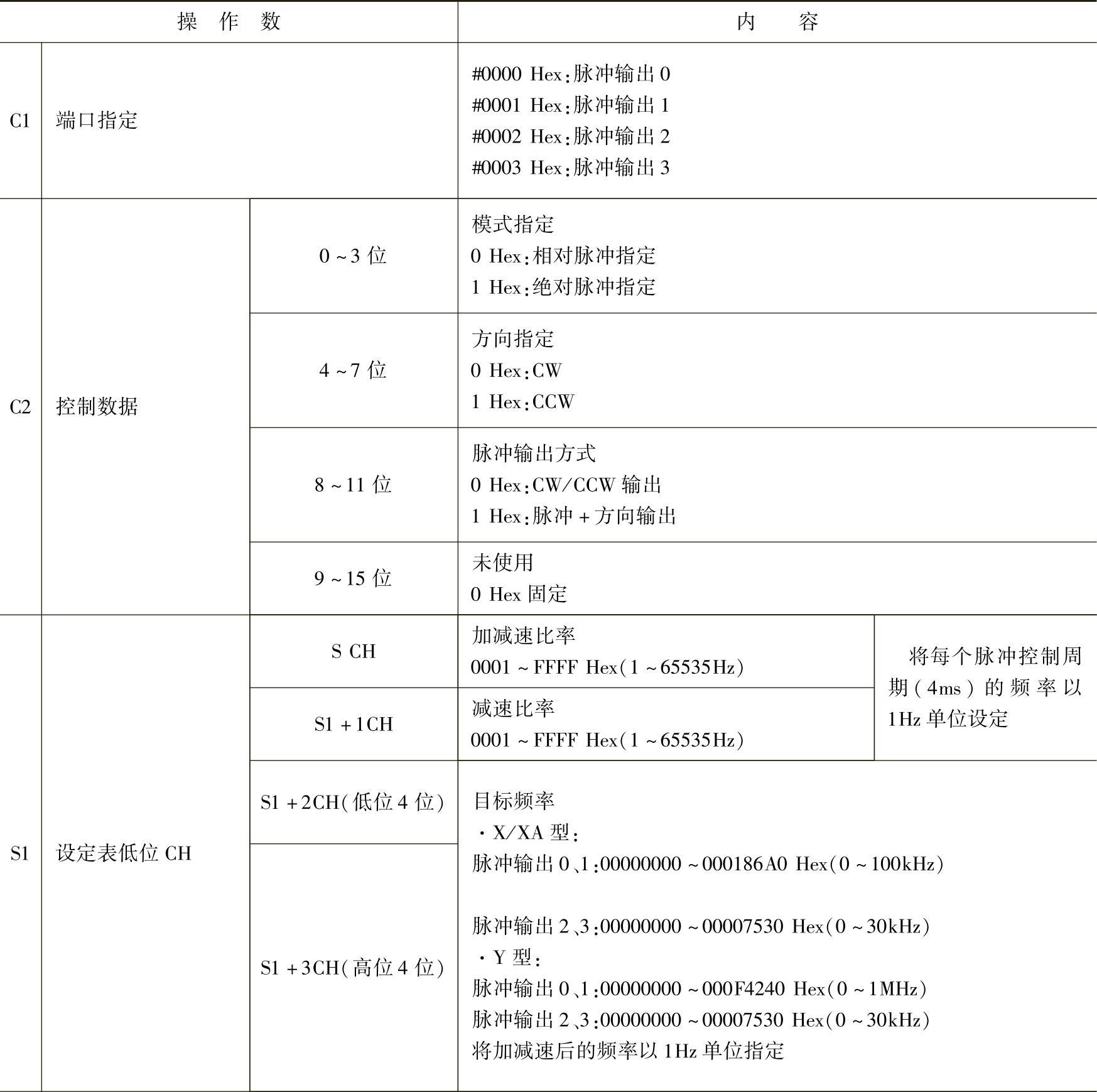
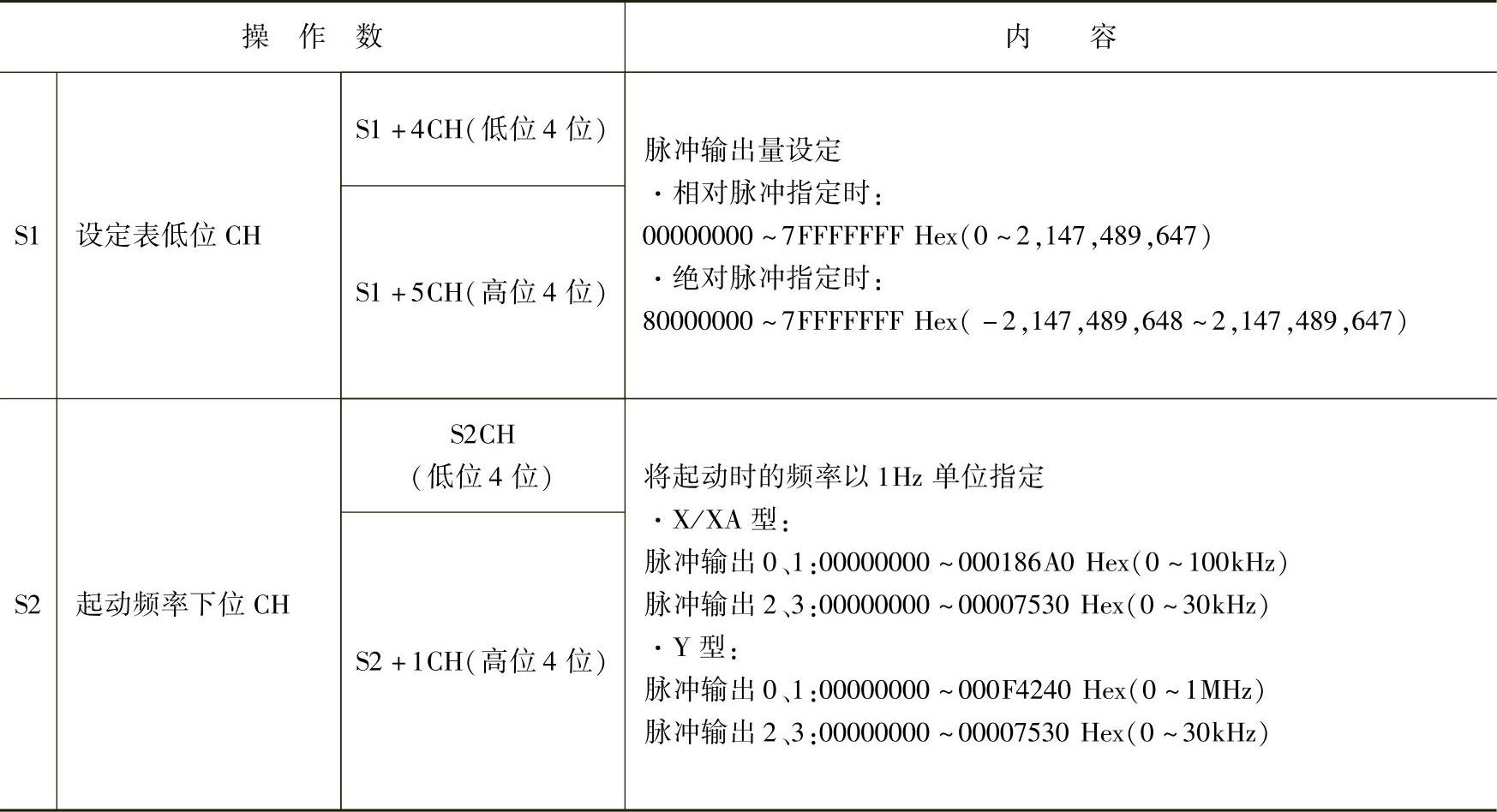
这里,C1用以端口指定。C2为控制数据。S2用以指定起动时的脉冲频率,S1为加速比率,S1+1为减速比率,一般可在1~65535之间选定;S1+2、S1+3为目标频率,一般可在1~100000之间选定。S1+4、S1+5为输出脉冲数。这些指令参数含义及选用见表5-11。
表5-11 PLS2指令参数的含义及选用
(续)
实际的输出脉冲数与相对或绝对脉冲有关。相对脉冲指定时为
移动脉冲量=脉冲输出量设定值
绝对脉冲指定时为
移动脉冲量=脉冲输出量设定值-当前值PLS2指令执行功能如图5-21所示。执行时,由C1指定端口,由C2指定控制数据,由S2指定起动频率、输出脉冲(图中①)。在每个脉冲控制周期(4ms)中,根据指定的加速比率,在达到目标频率之前,使频率增加(图中②)。达到目标频率之后停止加速,以等速继续脉冲的输出(图中③)。到达指定的脉冲输出量和减速比率中所计算得到的减速点(使频率减少的定时)之后,在每个脉冲控制周期(4ms)中对频率进行减少,当到达起动频率时,停止输出(图中④)。
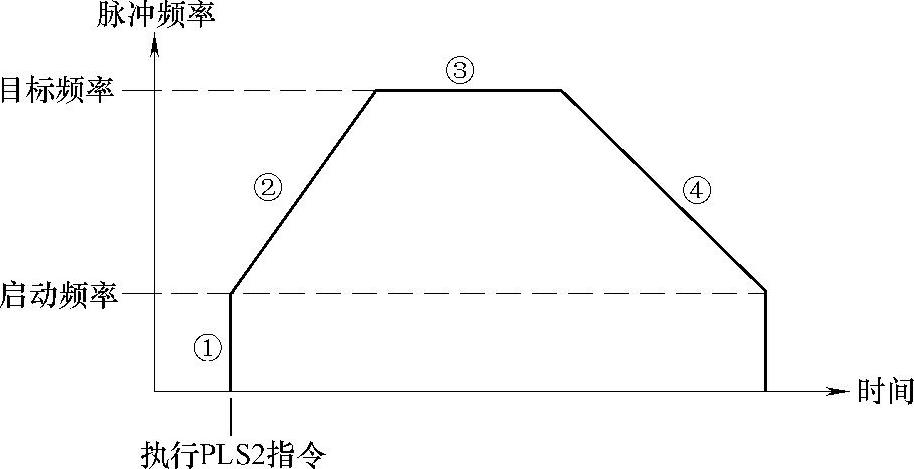
图5-21 PLS2指令执行效果
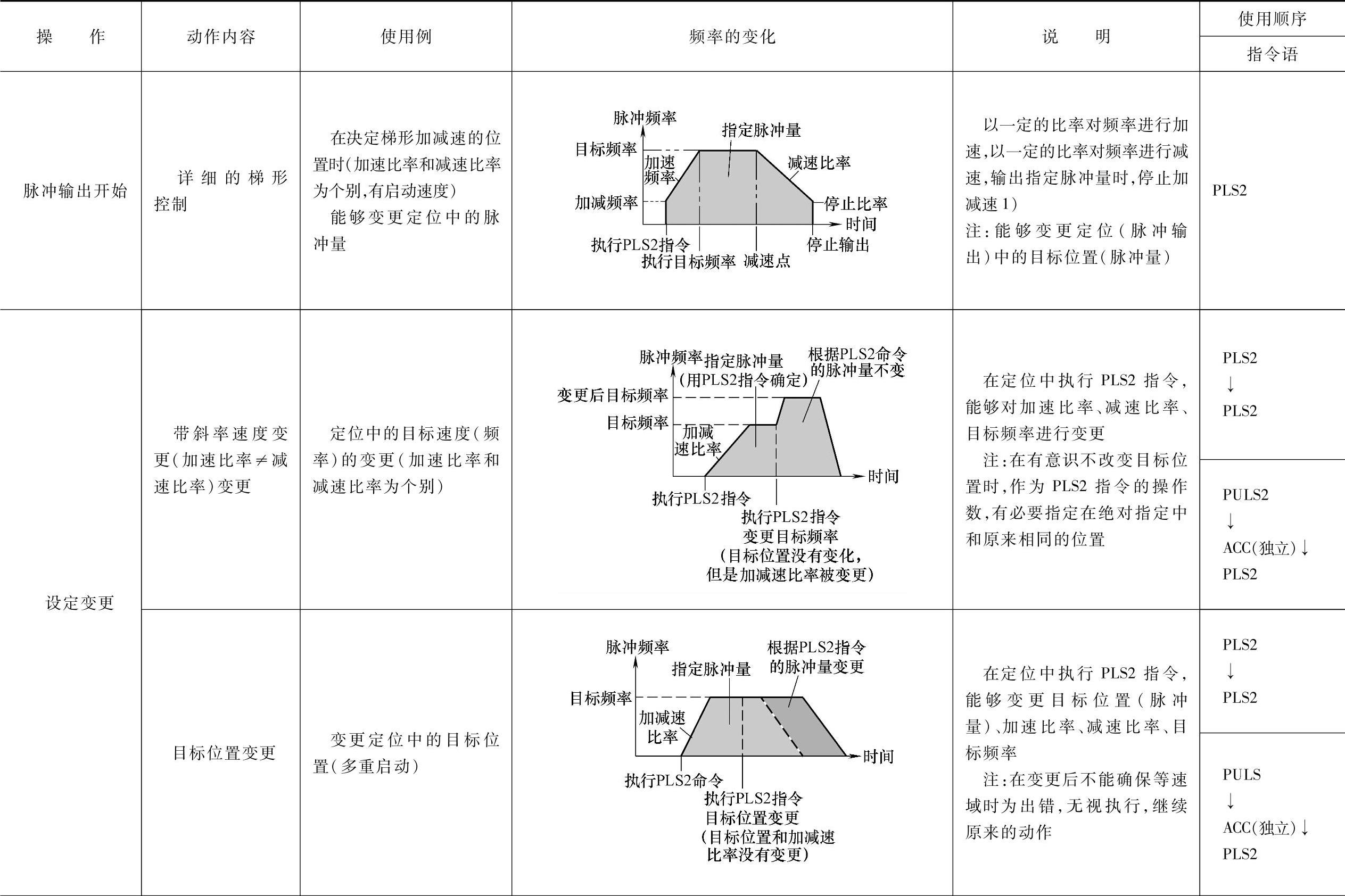
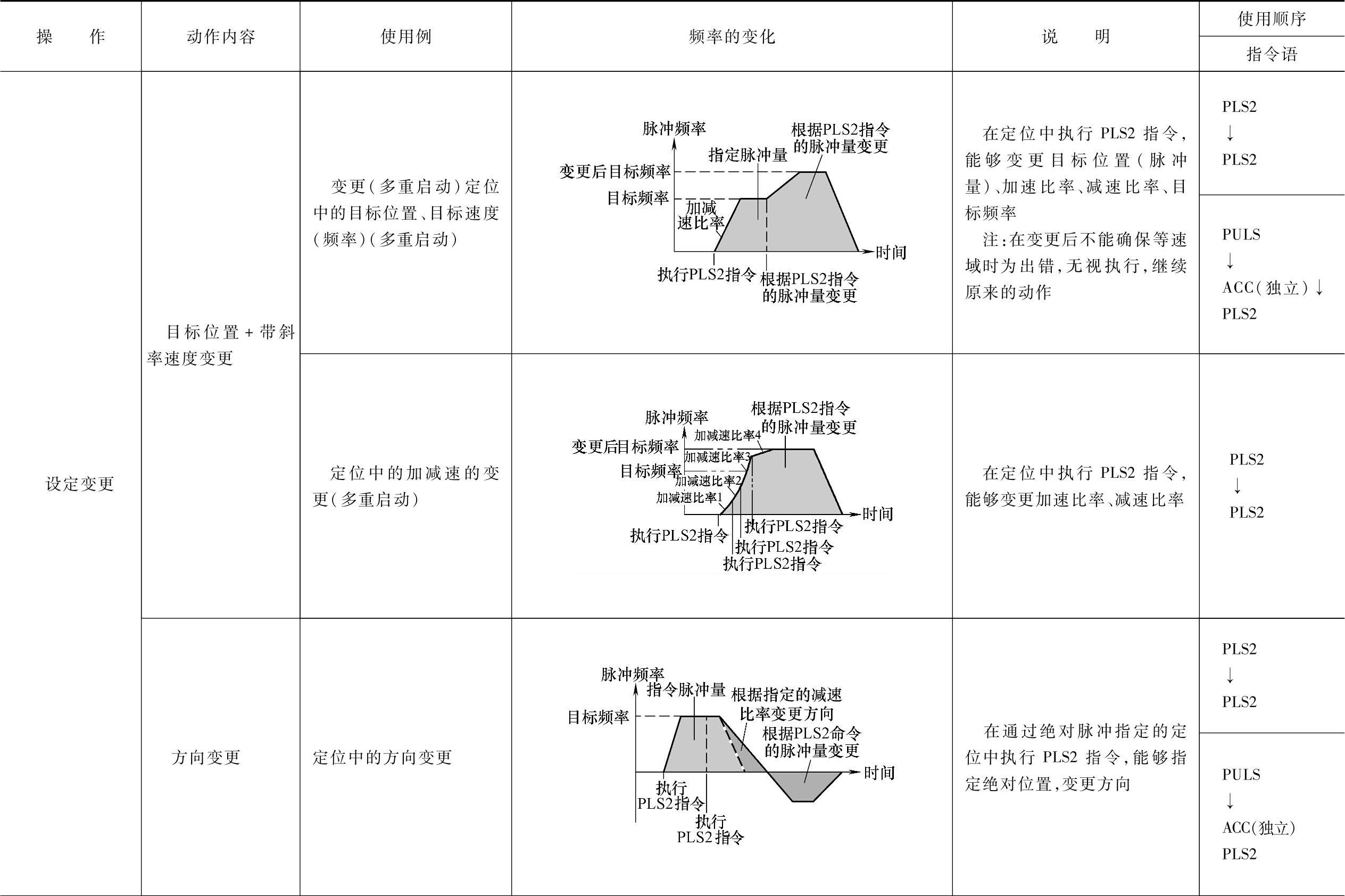
执行一次PLS2指令时,由指定条件开始输出脉冲,所以本指令为微分执行。表5-12及表5-13所示分别为独立与连续模式输出的各种应用。
图5-22a为ACC指令一个应用实例,设定如图5-22b所示。执行本程序,当0.00由OFF→ON时,从脉冲输出口0开始(脉冲数为10000)输出脉冲。起动频率为200Hz。加速比率为500Hz/4ms。加速到目标频率50kHz为止。之后从减速点,以250Hz/4ms的减速比率进行减速,当减速到起动频率的200Hz时,停止脉冲输出。图5-22c为程序执行的效果。
表5-12 独立模式输出
(续)
(续)
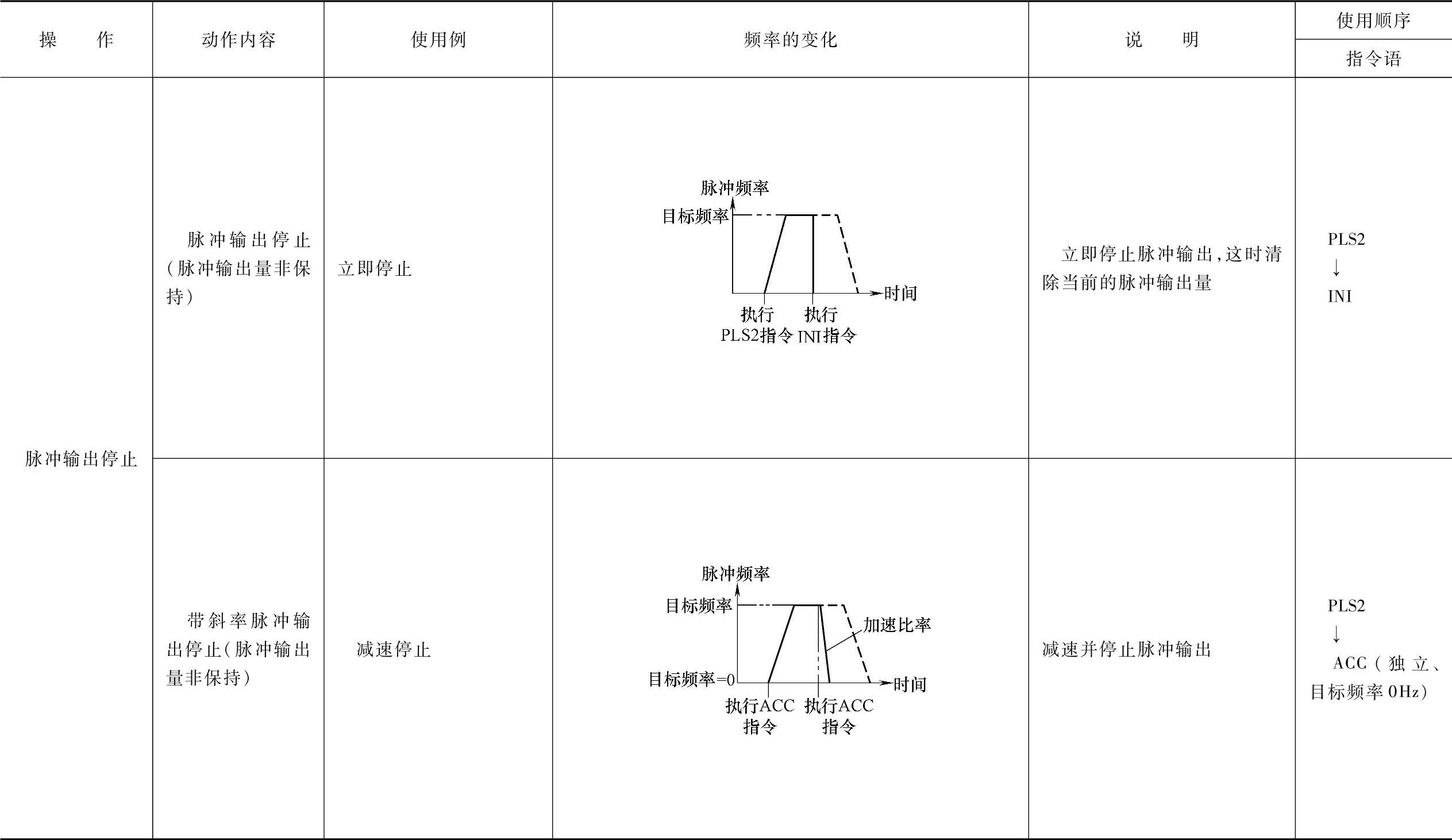
表5-13 连续模式输出
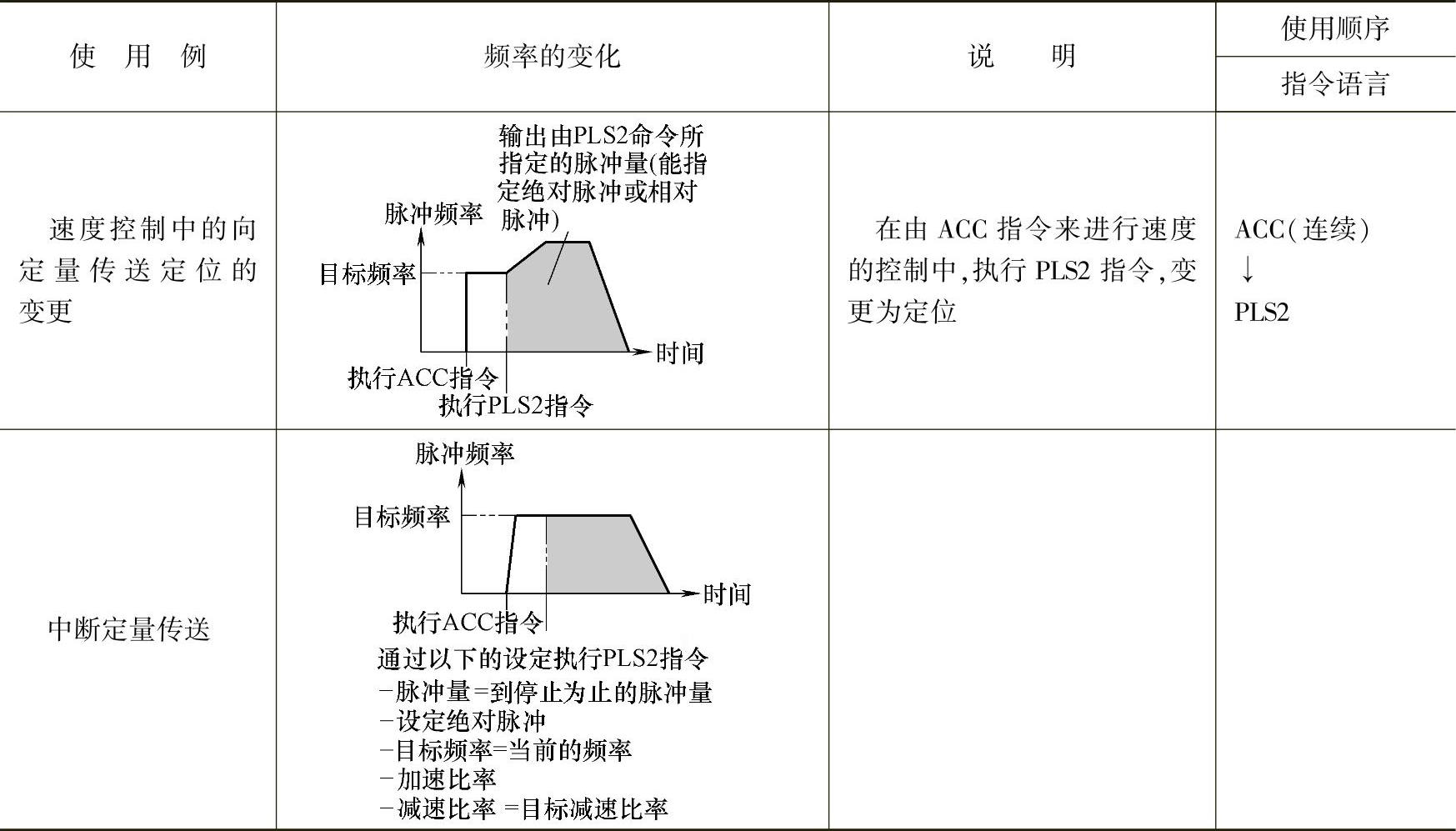
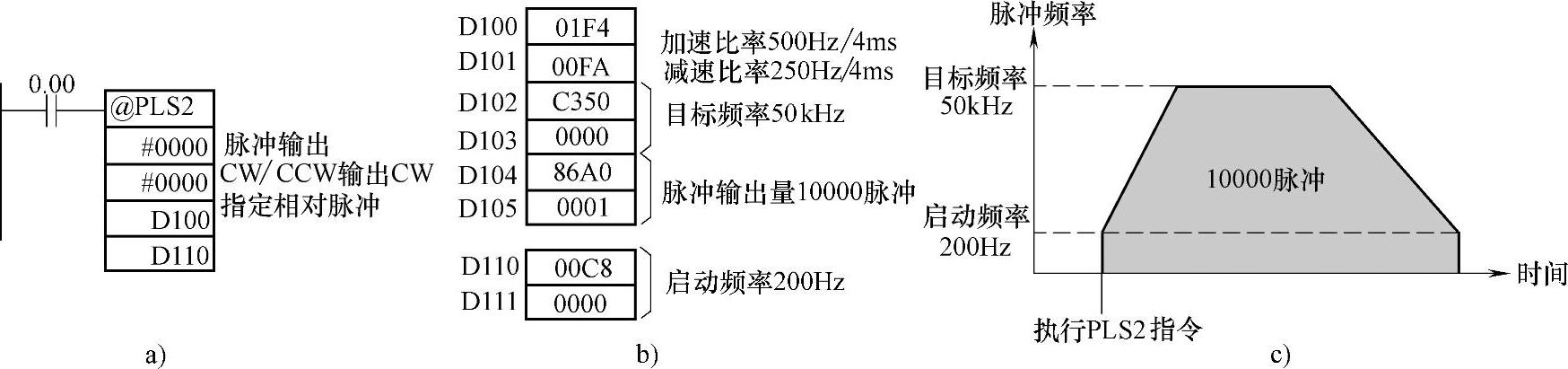
图5-22 PLS2应用实例
a)应用实例 b)设定值 c)执行效果
5.ORG指令
本指令用以进行原点搜索或原点复位。其梯形图格式如下:
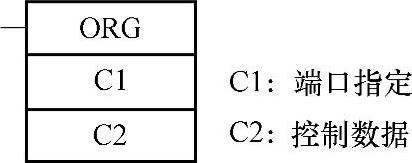
这里,C1用以端口指定。0000Hex:脉冲输出0。0001 Hex:脉冲输出1;0002 Hex:脉冲输出2(仅CP1H);0003 Hex:脉冲输出3(仅CP1H),0020 Hex:变频器定位0(仅CP1L)。
C2为控制数据。0~3固定为0,4~7也固定为0;8到11:0为CW/CCW输出,1为脉冲加方向输出;9到15:0为原点搜索,1为原点复位。
原点搜索是通过输出脉冲驱动运动部件,使用“原点附近”信号的输入、“原点信号”输入来确定原点。原点复位是从当前位置向确定的原点移动。
ORG指令主要用于绝对坐标系,详细内容请参见有关手册。
6.PRV指令补充说明
PRV指令在脉冲输入、输出中都很有用。在脉冲输出时,可用以读取输出状态。这时,应把它的C2设定为0001Hex。至于读取哪个口状态,可用C1设定输出口(0000Hex:脉冲输出口0、0001Hex:脉冲输出口1)。所读的状态数据存于D字中。其中第4位为1,表示脉冲正在输出,0表示脉冲输出已完成(停止)。用它控制脉冲的正确输出是很方便的。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。