



为适应模拟量模糊控制的需要,OMRON公司于20世纪末,开发了分别用于大、中型机的模糊控制单元。图4-100所示为C200H-FZ001模糊控制单元外观。
它可处理8个输入、4个输出。最多有可建立128个规则。每个规则可有8个条件与两个结论。
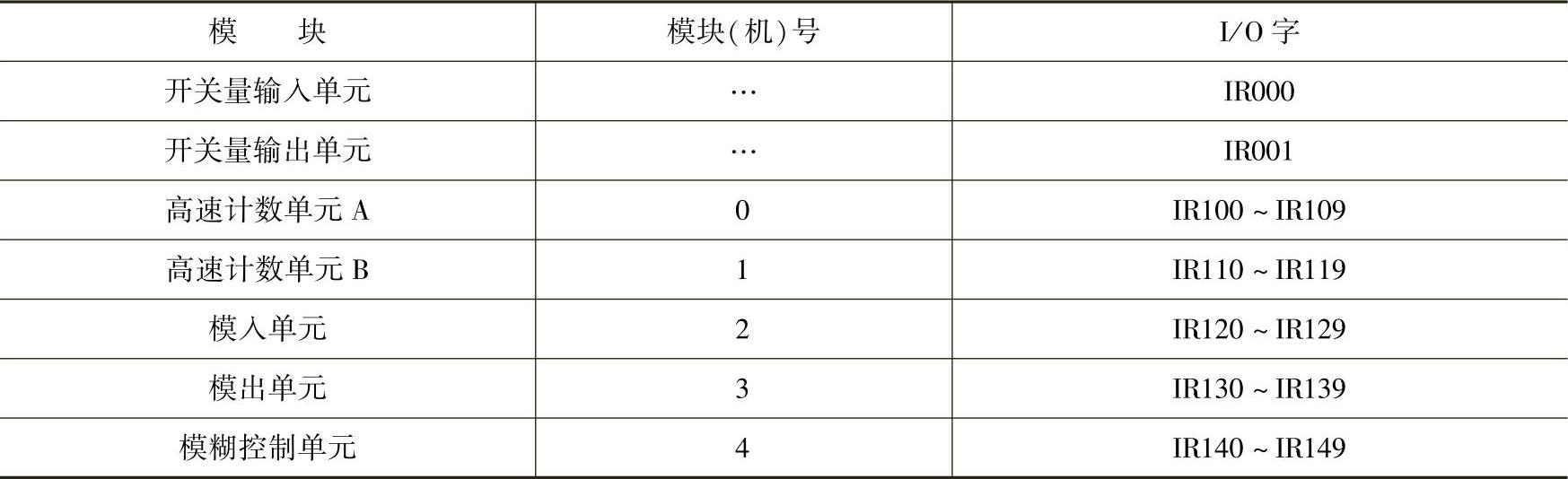
1.内存区分配
用机号设定开关指定机号n(n=0~9,不能与其它特殊古单元的机号重复)后,有5(100+10n到100+10n+n-1)个字为本单元专用。这些字的功能见表4-20~表4-22。
2.使用
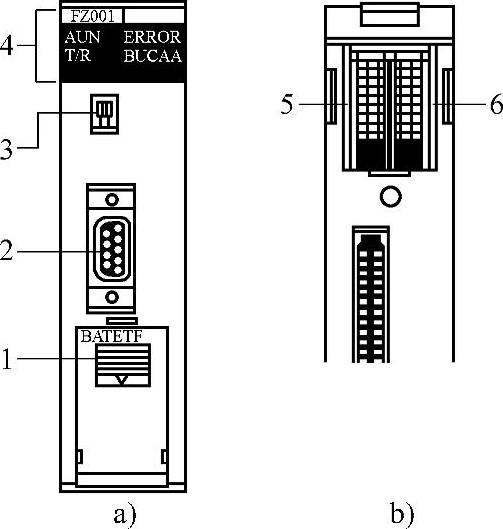
图4-100 模糊模块
a)面板 b)背板 1—内装电池 2—RS-232通信口 3—单元号开关 4—指示灯 5—DIP开关1 6—DIP开关2
以下以控制传送带B速度的实例,如图4-101所示,说明这个单元的使用。从图知,这里有两个传送带,带A用以输送产品,等速运动,但产品间的间隔是随机的;带B用以输送包装盒,盒的间隔是相等的,但速度是要调整的。同时,有4个光电开关,PH1、PH2、PH3及PH4,用以检测产品(PH1、PH3)或包装盒(PH2、PH4)通过的情况。还有两个旋转编码器A、B,分别安装在A、B传送带的驱动电动机轴上(未示出),用以检测产品与包装盒间的位置偏差。
表4-20 字的功能表

表4-21 字的功能表(续1)

表4-22 字的功能表(续2)

当产品通过PH1时,检测产品的PLC的高速计数单元记录旋转编码器输入的脉冲,以计算产品离开PH1处的距离。而当包装盒通过PH2时,检测包装盒的PLC的高速计数单元记录旋转编码器输入的脉冲,以计算包装盒离开PH2处的距离。这两个距离差,也就是两者的位置偏差。当产品到了PH3位置,而包装盒又正好到了PH4的位置时,传送带上的机械手把产品推向包装盒。产品装入包装盒后,将在传送带B的带动下,送到目的地。

图4-101 传送带B速度控制
由于产品的间距常是不相等的,为了确保产品到达PH3时,正好包装盒也正好到达PH4,须经常调整传送带B的速度,以保证产品与包装盒位置偏差及其变化率合乎模糊控制要求。
这里用到的第1个模糊规则就是:如果产品包装盒位置偏差大,那么,传送带B速度加快;如果产品包装盒位置偏差小,那么,传送带B速度不必太加快。当然,这里假设每次只有一个产品通过。
令E代表偏差,则有:
E=旋转编码器A计数值-旋转编码器B计数值
此外,还有输入的数据为偏差E的变化ΔE::
ΔE:=(En)-(En-1)
3.输入变量模糊化
设5个模糊集合,反映这个偏差。这5个集合分别是负大(NL)、负小(NM)、零偏差(ZR)、正小(PM)、正大(PL)。各模糊集合的隶属度与偏差的关系也都是线性的,分别为“Δ”,或半“Δ”型。如图4-102所示。
也设5个模糊集合,反映这个偏差变化。这5个集合分别是负大(NL)、负小(NM)、零偏差(ZR)、正小(PM)、正大(PL)。各模糊集合的隶属度与偏差变化的关系也都是线性的,分别为“Δ”,或半“Δ”型。如图4-103所示。
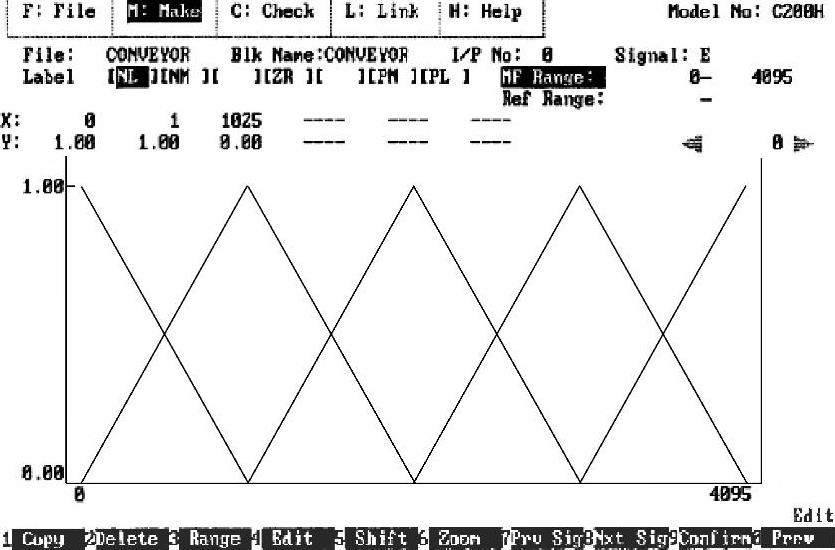
图4-102 偏差模糊集合隶属度
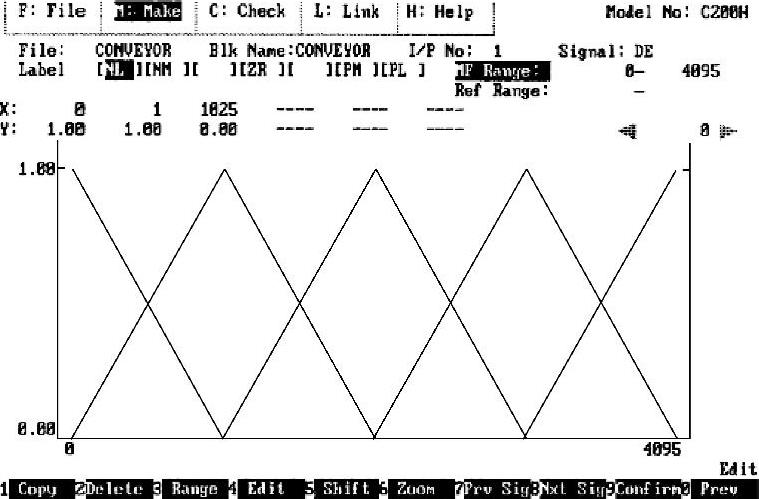
图4-103 偏差变化模糊集合隶属度

图4-104 输出模糊集合隶属度
4.输出量的解模糊
也设7个模糊集合,反映这个偏差变化。这5个集合分别是负大(NL)、负中(NM)、负小(NS)、零偏差(ZR)、正小(PS)、正中(PM)、正大(PL)。各模糊集合的隶属度与偏差变化的关系也都是线性的,分别为直线型。如图4-104所示。
这三组集合与图4-92不同的是,它用OMRON提供模糊单元有关软件,FSS软件建立的。FSS软件界面友好,用下拉式菜单进行操作,即使计算机的初学者,只要对系统熟悉,按提出要求作,也不感困难。
5.建立规则
规则是依实际经或专家验建立的。当E、ΔE处于不同情况时,依经验对应的输出见表4-23。
表4-23 输出表

若用符号表示,则应为表4-24。这里DE即为ΔE。NL即为包装盒大减速、包装盒速度慢、装盒超前。NM即为包装盒减速。NS即为包装盒稍减速、包装盒速度稍慢、包装盒稍超前。等等。
表4-24 符号表达的输出表

如果将表4-24的含义转换为规则,则为
IFE=NL AND DE=PL THEN VB=NL
IFE=NL AND DE=PS THEN VB=NL
IFE=NL AND DE=ZR THEN VB=NM
IFE=NL AND DE=NS THEN VB=NM
IFE=NL AND DE=NL THEN VB=NM
IFE=NS AND DE=PL THEN VB=NI
IFE=NS AND DE=PS THEN VB=NM
IFE=NS AND DE=ZR THEN VB=NS
IFE=NS AND DE=NS THEN VB=NS(https://www.xing528.com)
IFE=NS AND DE=NL THEN VB=NS
IFE=ZR AND DE=PL THEN VB=NS
IFE=ZR AND DE=PS THEN VB=NS
IFE=ZR AND DE=ZR THEN VB=ZR
IFE=ZR AND DE=NS THEN VB=PS
IFE=ZR AND DE=NL THEN VB=PS
IFE=PS AND DE=PL THEN VB=PS
IFE=PS AND DE=PS THEN VB=PS
IFE=PS AND DE=ZR THEN VB=PS
IFE=PS AND DE=NS THEN VB=PM
IFE=PS AND DE=NL THEN VB=PM
IFE=PL AND DE=PL THEN VB=PM
IFE=PL AND DE=PS THEN VB=PM
IFE=PL AND DE=ZR THEN VB=PM
IFE=PL AND DE=NS THEN VB=PL
IFE=PL AND DE=NL THEN VB=PL
当然,这些规则须下给模糊控制模块。只有这样,模块才可,依照这些规则实施控制。
6.I/O分配
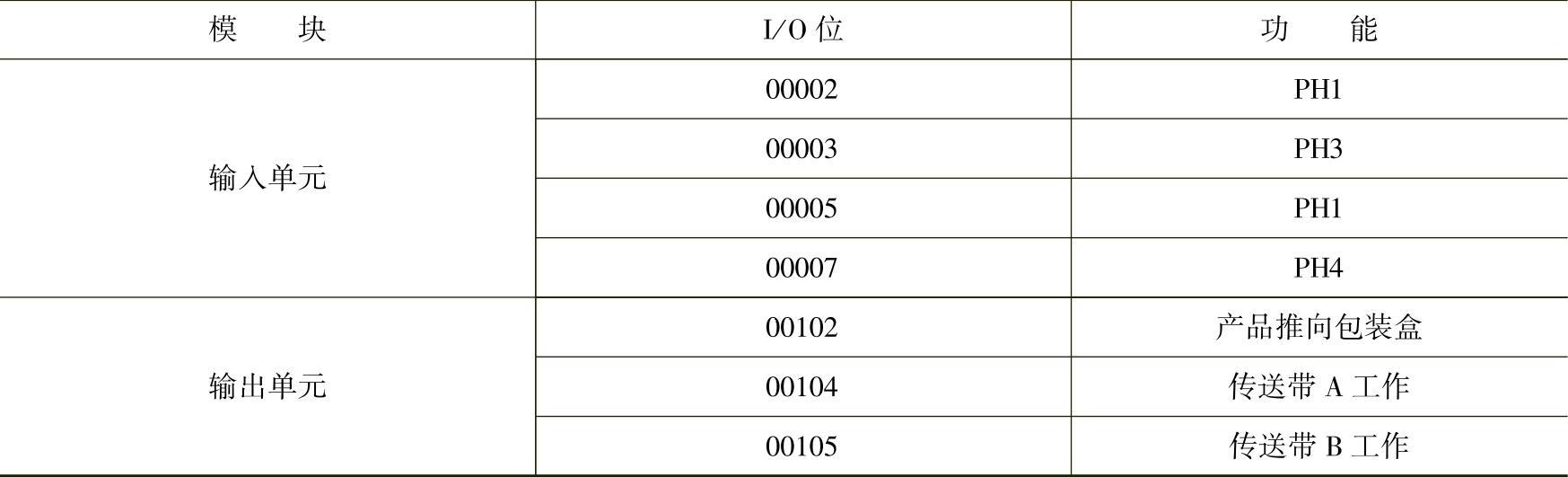
本例各输入、输出及特殊单元的机号及地址分配见表4-25。
表4-25 机号及地址分配
模入单元的用以检测两个传送带驱动电动机的转速。121通道反映A带电动机转速,123通道反映B带电动机转速。
模出单元用以控制带B的驱动电动机。用其130通道的值,控制其转速。
本例各输入、输出开关量地址分配见表4-26。
表4-26 输入、输出开关量地址分配
7.DM区设定
高速计数单元的有关设定见表4-27。
表4-27 高速计数单元设定

模入、模出单元也要按要求,作相应的设定,具体略。
8.梯形图程序
(1)初始化。进行有关模块的初始化设定。控制逻辑:进行起动、停车及有关控制。具体略。
(2)输入处理。采集包装盒与产品的位置偏差及偏差变化,并按间隔设定系数进行转换,然后送模糊控制单元的输入1及输入2。图4-105所示为采集包装盒与产品的位移计数程序。
从图知,当PH1 ON及PH3 OFF,即产品到达PH1,而又未到达PH3,则发出A高速计数开始命令。稍作延时(命令到执行有个I/O刷新的过程),后则不停地把计数器A的现值送DM110。当PH2ON及PH4OFF,即包装盒到达PH2,而又未到达PH4,则发出B高速计数开始命令。稍作延时(命令到执行有个I/O刷新的过程),后则不停地把计数器A的现值送DM120。
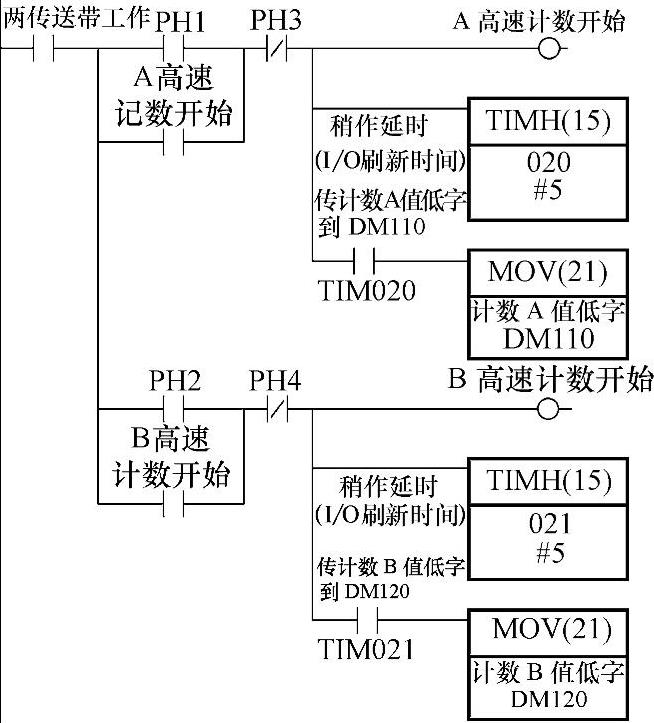
图4-105 输入处理程序
产品到达PH3时,PH3 ON A计数停止,并复位。包装盒到达PH4时,PH4 ON B计数停止,并复位。同时,DM110、DM120复位、置0(如图4-106中梯形图程序)。
图4-106所示为包装盒与产品的位置偏差及偏差变化计算、按间隔设定系数进行转换及送模糊控制单元的输入1及输入2的程序。
从图知,先是当前偏差复制,然后为计算偏差。接着,计算偏差变化。这时,如产品到达PH3、或包装盒到达PH4,则DM110、DM120复位。
为了,可调整模糊化域的间距,这里可设偏差系数、偏差变化系数,并用这系数乘偏差、偏差变化,以得到偏差修正值及偏差变化修正值。
进而,求偏差及其变化的绝对值。这么做是为了与图4-102及图4-103设置相一致。最后,再对偏差及其变化的绝对值进行控制,以避免超出模糊单元的输入范围。作了以上处理后,则把偏差及其变化这两个量作为模糊单元的第一及第二输入送模糊单元。只要模糊单元设定正确、工作正常,则起动模糊处理。
给了模糊单元输入,起动模糊处理后,模糊控制单元会按下载的规则,进行模糊化、模糊推理,并产生相应输出。这些都无须用户干预与编程。这是使用模糊控制模块的最大优点。
(3)输出处理。把模糊控制处理后产生的输出,用于控制传送带B的电动机,还须作相应处理。有两种处理方法:一为绝对输出处理,另一为相对输出处理。
1)绝对输出处理。它把模糊单元的输出,直接转换为控制传送带B电动机的模出通道130。这么作,系统是有静差的。
2)相对输出处理。它把模糊单元的输出,先转换为相对值,再将这相对值与130的现值作代数和。这么作,系统是有无静差的。图4-107所示即为这个程序。
从图知,这里,在输出前,还对输出的最大值及最小值作了控制。使其不大过4095(十六进制为FFF,为模出单元的最大值),不小过DM185(此值为带A电动机转速的1/10)。
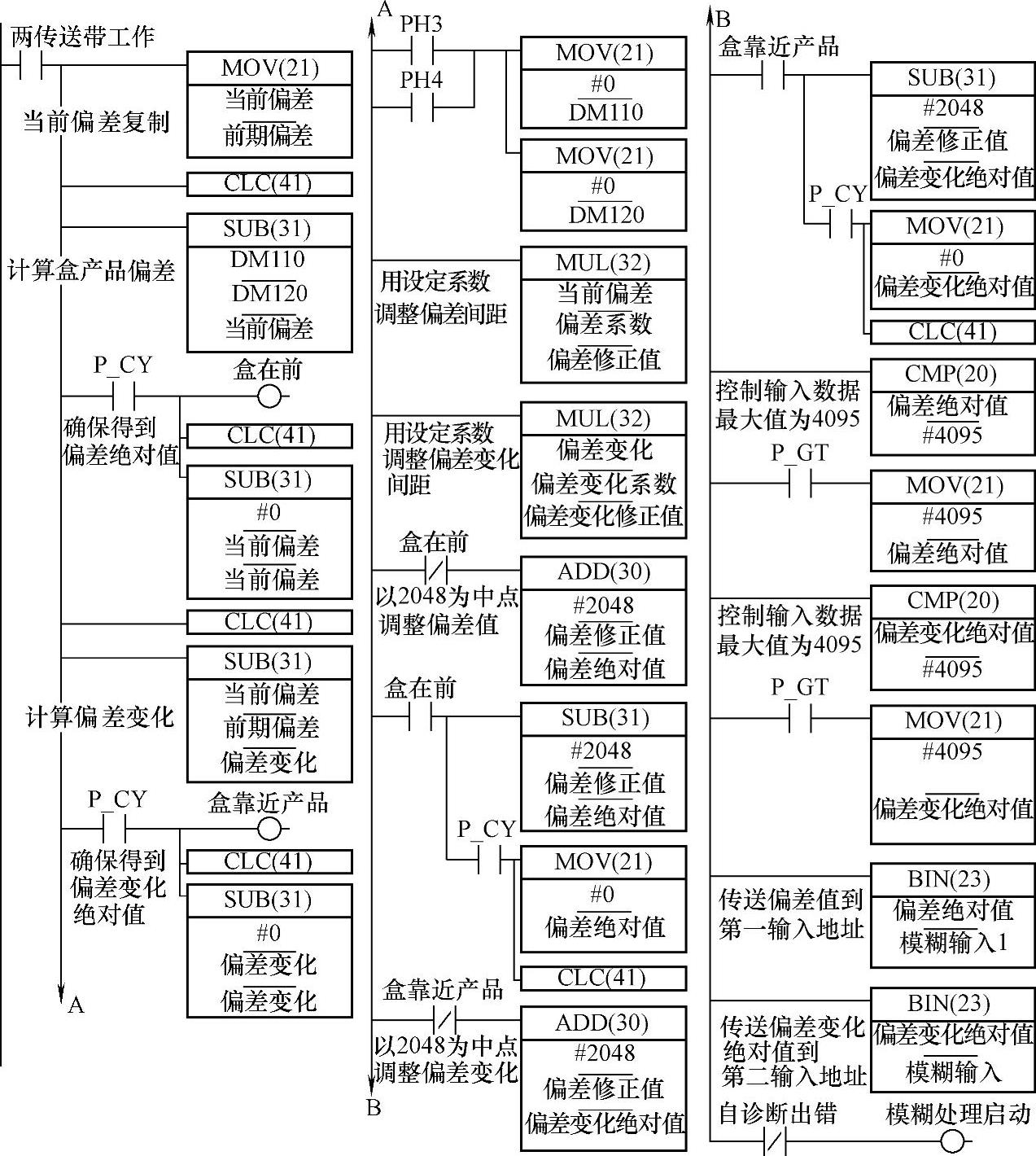
图4-106 位置偏差及偏差变化计算程序
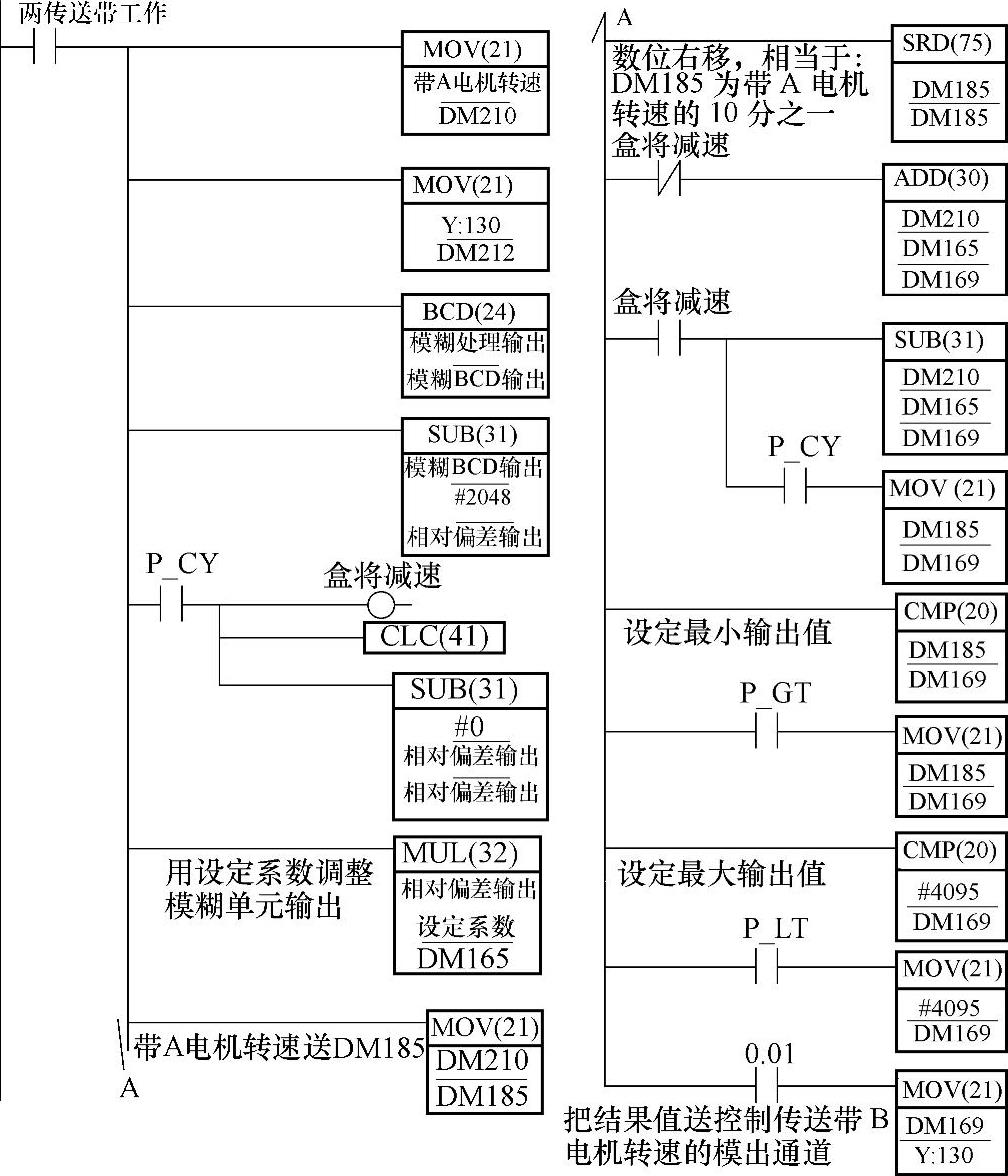
图4-107 相对输出处理程序
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。