



温度量是很常用的模拟量,在工业控制中,常要对其进行控制。在模拟量PID控制硬件单元中,各PLC厂家多开发有专用于温度控制的硬件单元,即这里将介绍的温度控制单元。它不仅直接读入温度信号,而且可依据预置的控制方式与要求的温度值,进行温度控制。
CJ1W-TC系列模块就是这样的温度控制单元的一种。是OMRON公司CJ1机的一种特殊I/O单元。它直接接受来自热电偶或铂电阻温度计的输入,执行相应的PID控制,并通过开路集电极送出输出结果。
图4-66所示为CJ1W-TC系列模块的正面视图(图4-66a)与侧面视图(图4-66b)。
由于CJ1机为无底板的模块式PLC,所以,它的模块间连接器在侧面。从正面视图可看出,它的面板上有单元号、DIP及输入类型开关。还有3个状态指示灯及若干输出指示灯。还有接线端子。状态指示灯名称及其含义见表4-10。
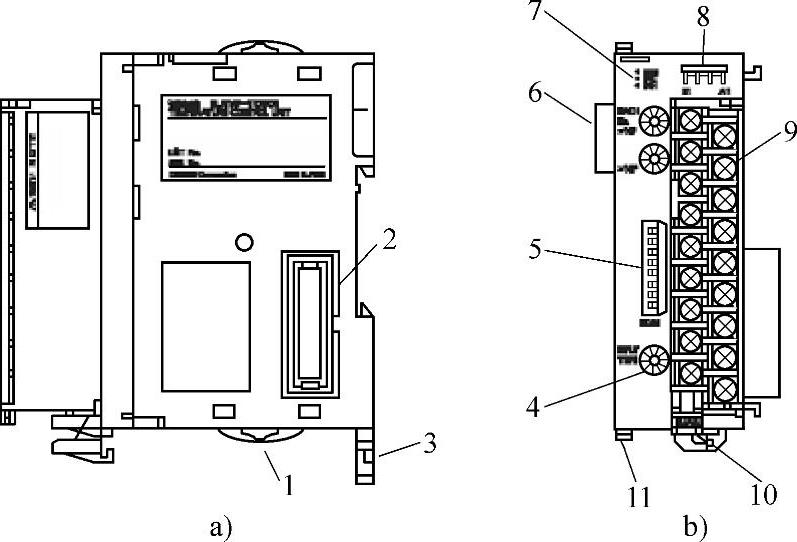
图4-66 CJ1W-TC系列模块
1、11—滑动锁扣 2—连接器 3—DIN安装栓 4—输入类型开关 5—DIP开关 6—单元号开关 7—状态指示灯 8—输出指示灯 9—端子板 10—端子板锁定杆
表4-10 状态指示灯含义

1.类型
CJ1W-TC系列模块有两种主要单元类型:一种提供4个控制回路,另一种提供2个带加热器断线检测功能的控制回路。两种类型都有和热电偶(R,S,K,J,T,B或L)相配的型号及和铂电阻温度计(JPt100或Pt100)相配的型号,都可使用NPN输出和PNP输出。也可进行PID控制参数的自动整定。
图4-67表示CJ1W-TC001温度控制单元(4个控制回路,热电偶输入,NPN输出)和CJ1W-TC103温度控制单元(2个控制回路,带加热器烧断检测,铂电阻温度计,NPN输出)的基本系统。
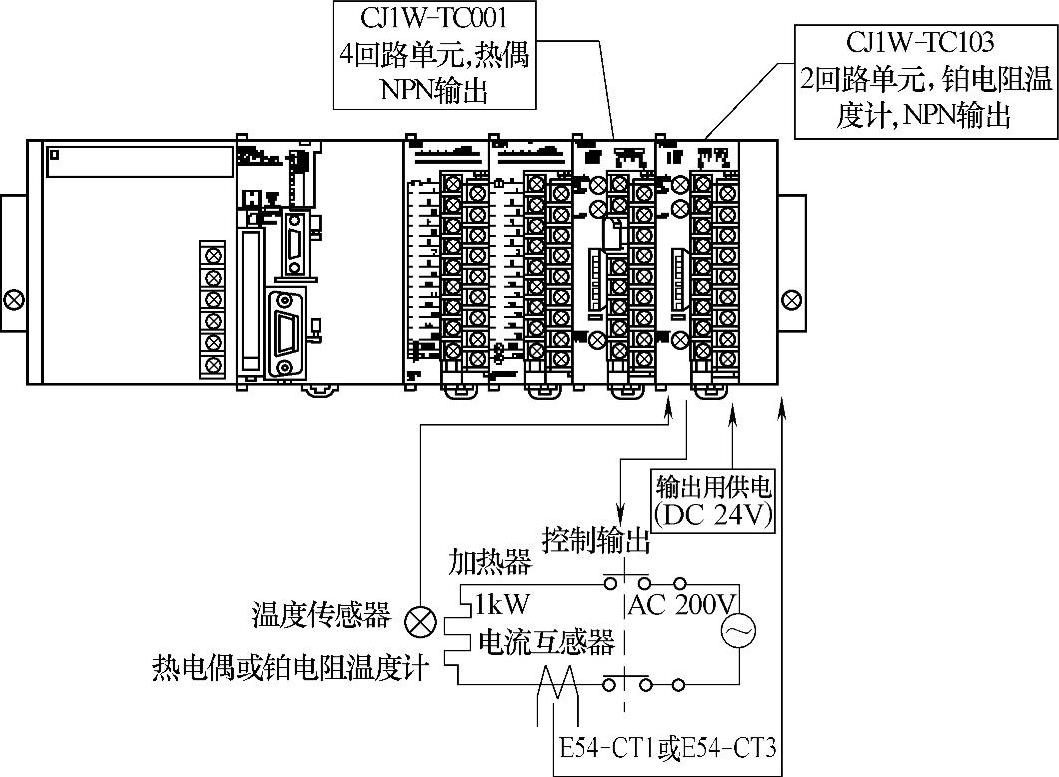
图4-67 温度控制单元控制系统
要注意的是:第一、必须使用一个OMRON E54-CT1或E54-CT3电流互感器,不要使用任何其它电流互感器。第二、将回路的停止位转为ON以停止温度控制。如果正在使用PID控制,而且用一个操作开关输入到加热器使加热器转为OFF,则PID控制性能是反作用的。
2.规格
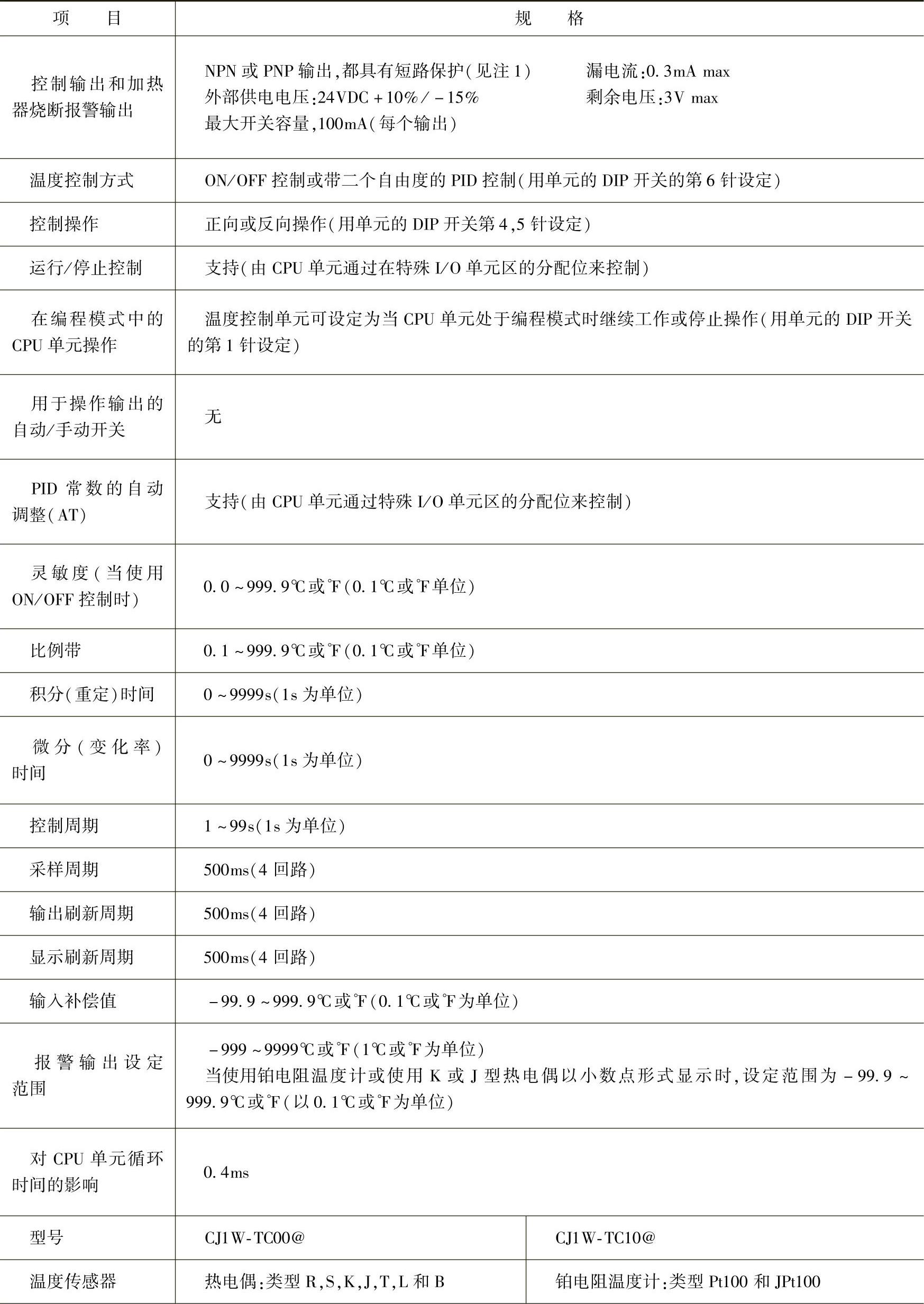
CJ1W-TC系列模块共同规格见表4-11。不同类型的不同规格见表4-12。
表4-11 CJ1W-TC系列模块共同规格
(续)
(续)
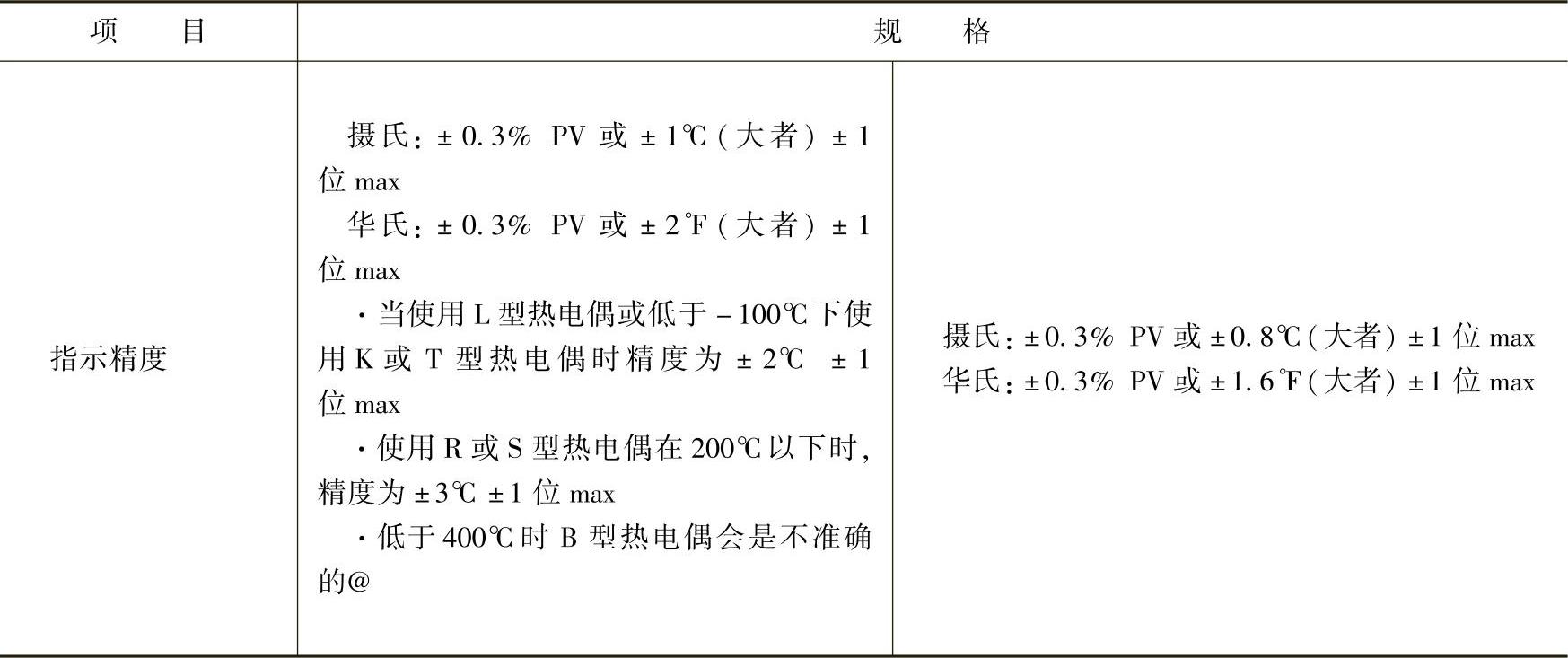
注:1.型号的最后3位标明单元的特点。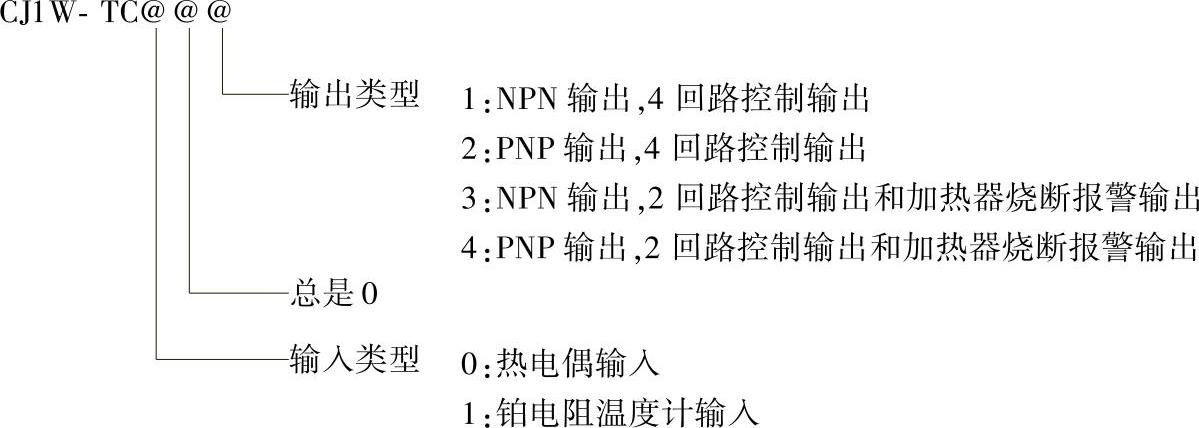
2.热电偶的指示精度
·给出的精度等级是指温度控制单元和冷端补偿器(在端子板上)一体使用时的。必须将单元和端子板一起使用,单元和端子板上附有系列号以帮助保持一体性。
·当热电偶型温度控制单元返回检修时,必须将单元和端子板(带冷端补偿器)作为一体返回。
此外,有关加热器烧断(HB)报警的有关规格见表4-12。
表4-12 加热器烧断(HB)报警的有关规格
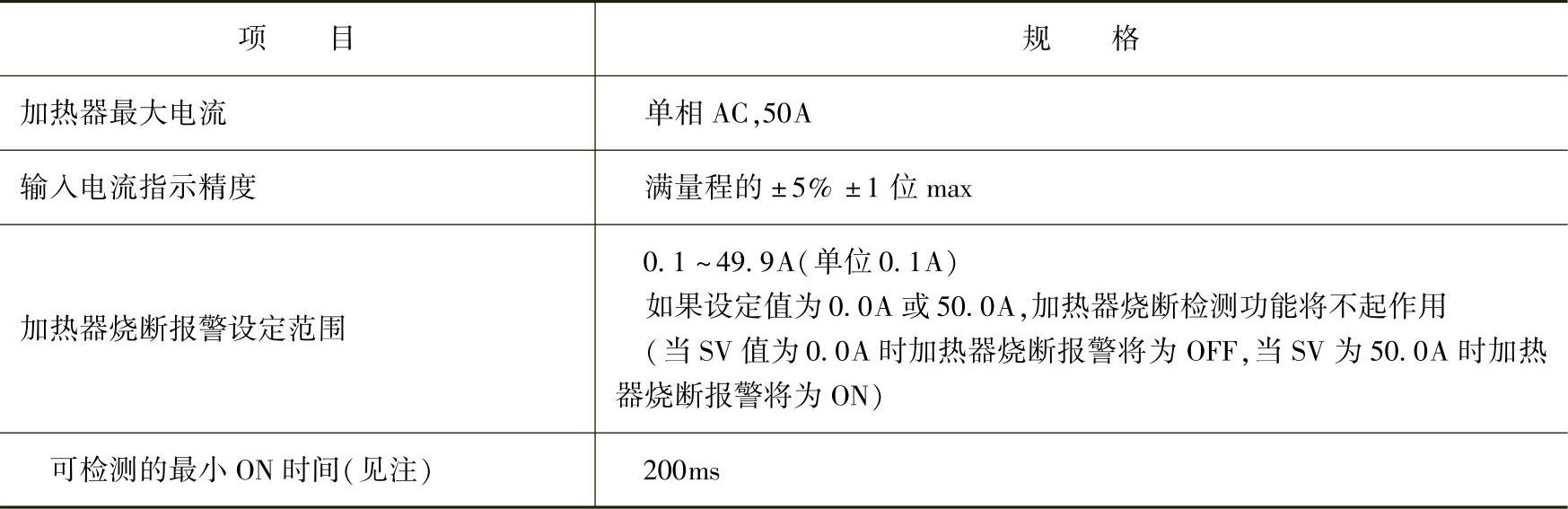
注:如果控制输出ON的时间小于200ms,加热器的烧断检测功能将不起作用,而且加热器电流测量也将不执行。
3.特点
(1)可直接连接温度传感器:可以将温度传感器直接连接到温度控制单元(2或4个输入)。有两种型号用于热电偶(R、S、K、J、T、B和L热电偶),两种型号用于铂电阻温度计。
(2)控制方式可选定:可进行PID控制,也可进行ON/OFF控制。这可用单元前面板上的一个开关(DIP开关的第6针)选定。
如用ON/OFF控制,首先要设定一个设定点。在反向操作时,达到设定值时,温度控制器将控制输出转为OFF,控制输出关断时系统温度将开始降落。当系统温度降到低于设定点时,控制输出将重新转为ON,这种ON/OFF操作是围绕设定点反复动作的。
为了避免这种反复动作过于频繁,可设定控制灵敏度。它决定了在控制输出重又转为ON之前,系统温度降落到低于设定点多远(见图4-68)。
如用PID控制,其采样周期可设定,默认值为500ms,与CPU单元的循环时间无关。并对CPU单元的循环时间没有影响。
(3)控制方向可选定:对正向操作(冷却),当PV值增加时控制变量是增加的;对反向操作(加热),当PV减小时控制变量增加。如图4-69所示。
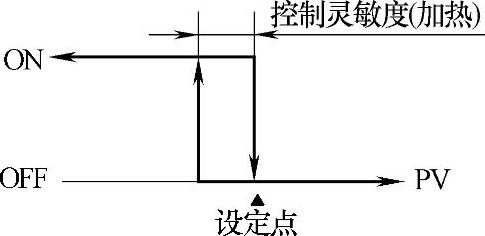
图4-68 灵敏度设定
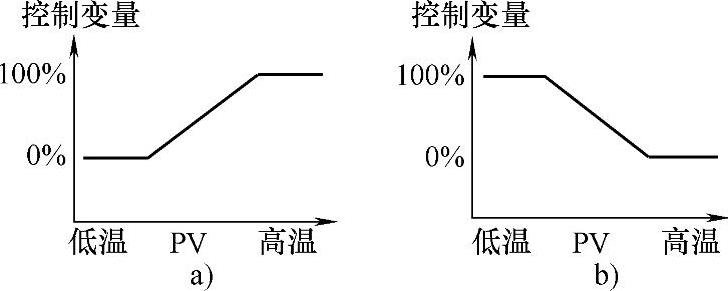
图4-69 正、反向控制
a)正向控制 b)反向控制
当用反向ON/OFF控制时,当PV值低于SV值时控制输出为ON。当PV等于或大于SV时控制输出为OFF。当用正向ON/OFF控制时,情况相反。
用单元DIP开关的第4、5针可以将温度控制单元的控制方向设定为反向操作或正向操作,出厂时设定为反向操作(加热)。
(4)数据格式可选定:可用单元前面板上的DIP开关(第3针),选择温度控制单元的数据,是用4位BCD码,还是用二进制(即4位十六进制)码处理。
(5)有输入补偿功能:对传感器测得的温度值,可增加一个补偿值,来调整PV值。
(6)加热器烧断检测(仅用于单相操作):当使用2回路温度控制单元时,每个回路可以接一个电流互感器(CT)以检测加热器烧断。
(7)每个回路有两个内部报警,可将报警输出到CPU单元的存储区中分配的区域,而且可以使用下列9种报警模式的任一种:高和低限报警、高限报警、低限报警、带备用顺序的高低限报警、带备用顺序的高限报警、带备用顺序的低限报警、绝对值高限报警、绝对值低限报警。
报警输出可设成有迟滞的。报警迟滞与报警输出ON/OFF间的关系,如图4-70所示。
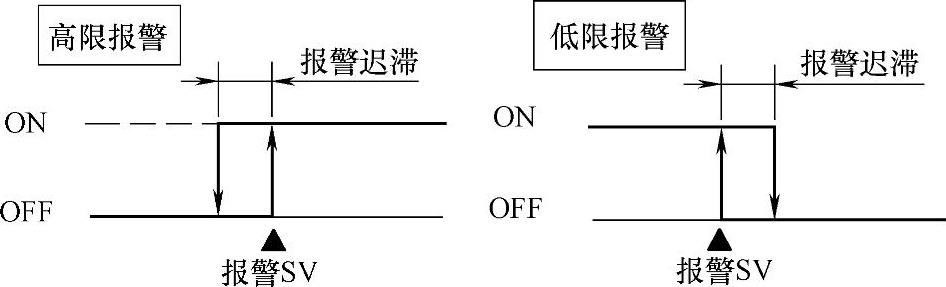
图4-70 报警迟滞与报警输出ON/OFF间的关系
报警还有个“待机顺序”问题。此即:在单元初始化期间,其PV进入报警范围时,待机顺序禁止报警输出。等PV值离开报警范围,下一次再进入报警范围后,报警输出将起作用。但待机顺序可重新起动,如单元重新起动时或当输出,OFF又转为OFF时,即又进入待机顺序状态。
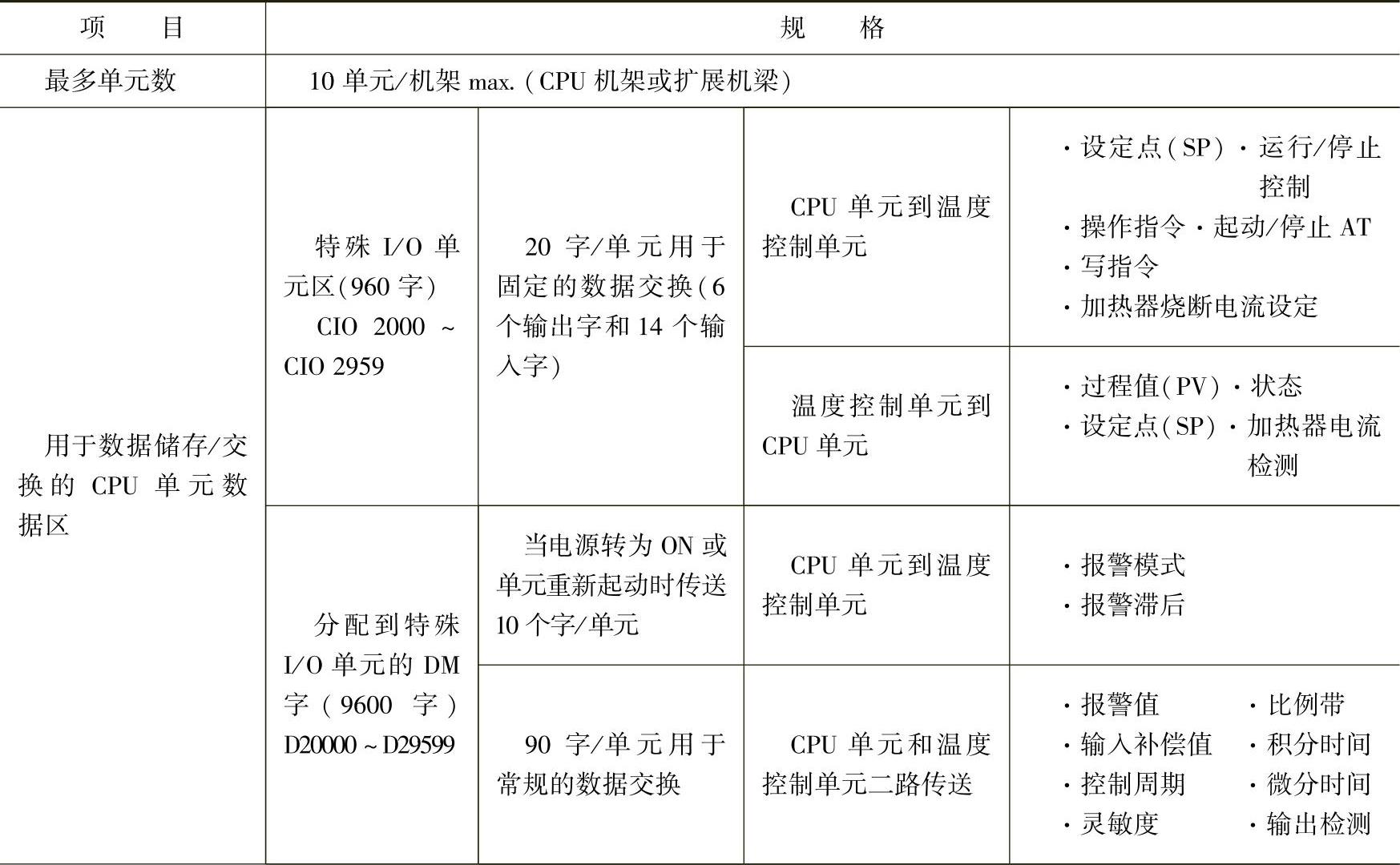
(8)与CPU单元可交换多种数据:其交换数据的情况如图4-71所示。
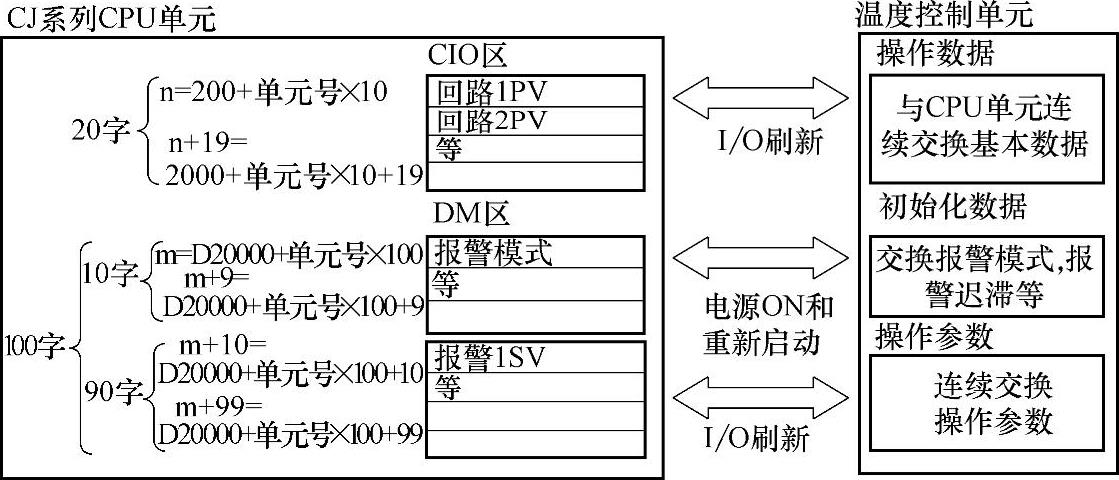
图4-71 交换数据简图
数据交换通过CPU单元的CIO和DM区中的字执行。操作数据存储在CIO区,初始化数据和操作参数存储在DM区。
操作数据为操作温度控制单元用的基本数据,在CPU单元I/O刷新时作交换。操作数据包括过程值、设定点、停止位、AT起动位、AT停止位和其它数据。所以,可从CPU单元用操作数据,向温度控制单元发命令,以切换温度控制单元PID控制的运行和停止。但当PLC处编程模式时,可用单元前面板上的DIP开关(第1针),选择温度控制单元是继续操作还是停止操作。(https://www.xing528.com)
初始化数据用于初始化温度控制单元的数据,是在PLC转为ON或温度控制单元重新起动时,作为初始化数据与CPU单元交换的,初始化数据包括报警模式,报警迟滞和其它数据。
操作参数为控制温度控制单元操作的参数,是在CPU单元I/O刷新时,作为操作参数与CPU单元交换的。操作参数包括报警SV、控制周期、比例带、积分时间和其它参数。
(9)温度控制单元有自己的数据存储器:
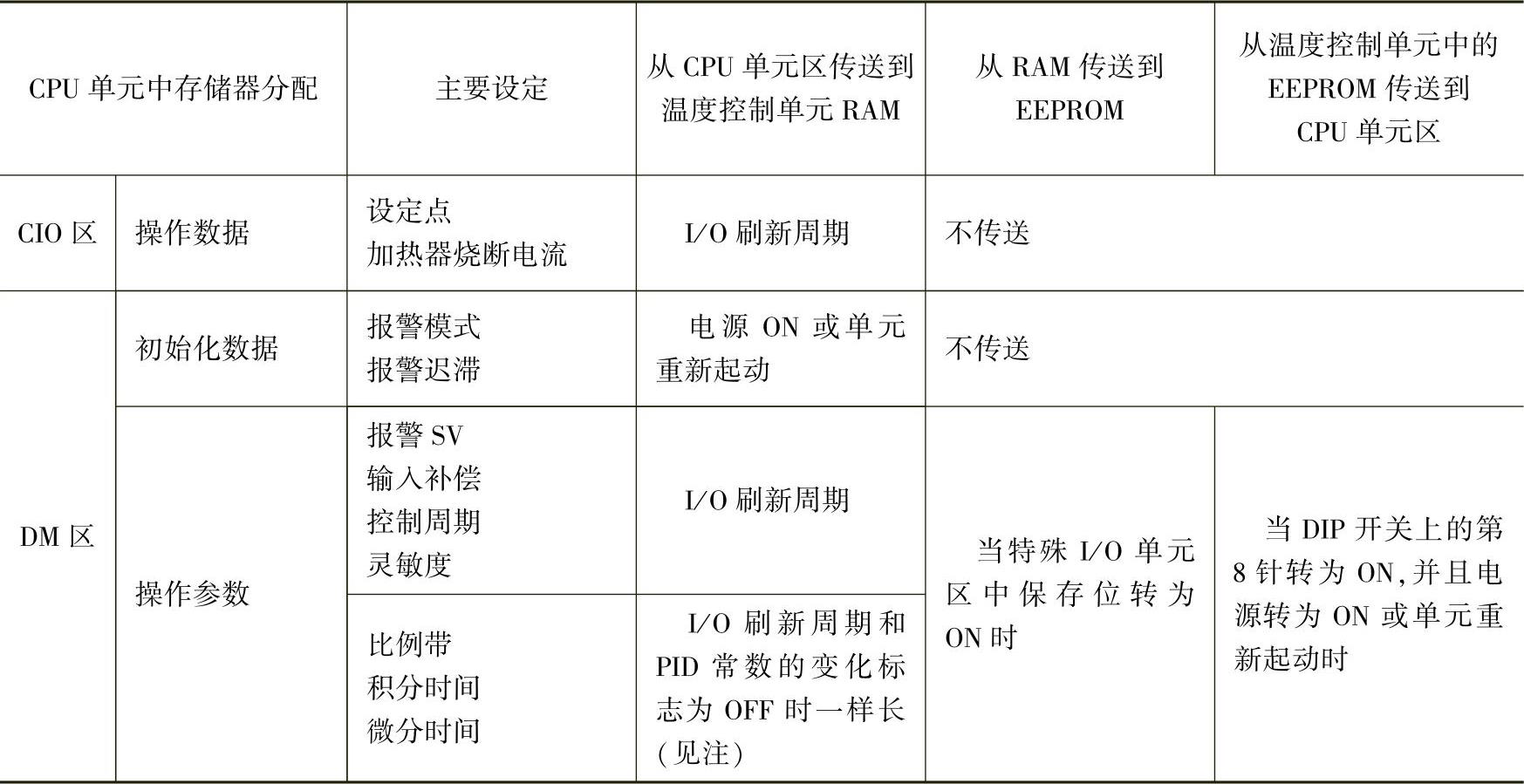
温度控制单元有两种存储器:RAM和EEPROM。表4-13说明了这些数据存储与传送的情况。
表4-13 数据存储与传送
注:1.自动整定的PID参数时,其结果在自动整定后自动写入RAM。
2.EEPROM写入的寿命为100000次。
温度控制单元的数据是,在与CPU单元交换数据时,写到温度控制单元RAM中的。如保存位置为ON,可以将这些数据的一部分从RAM写到EEPROM。如果DIP开关的第8针为ON,当电源转为ON或重新起动温度控制单元时,储存在EEPROM中的数据将自动传送到CPU单元的DM区,以便能用储存在EE-PROM中的数据操作。图4-72说明过了这些数据传送的情况。
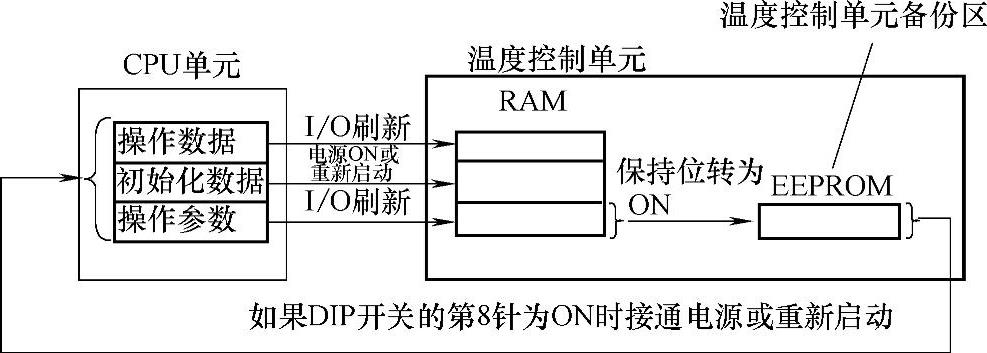
图4-72 数据传送概况
所以,为了简化温度控制单元的操作,可以将DIP开关的第8针转为ON,可方便地用储存在EEPROM中的数据操作。
(10)可使用OMRON公司改进的PID算法,实现双自由度控制,以提高控制的性能。而且,其PID参数是可自整定的。
4.使用
温度控制单元的安装和设定步骤如下。
(1)设定单元号。用面板上的单元号开关,设定单元号。单元号为两位数。设定后,在CIO区占用20字,在DM区占用100字。单元号与使用的CIO起始地址的对应关系为
n=200+(10×单元号)
共要用20个字,从n~n+19。
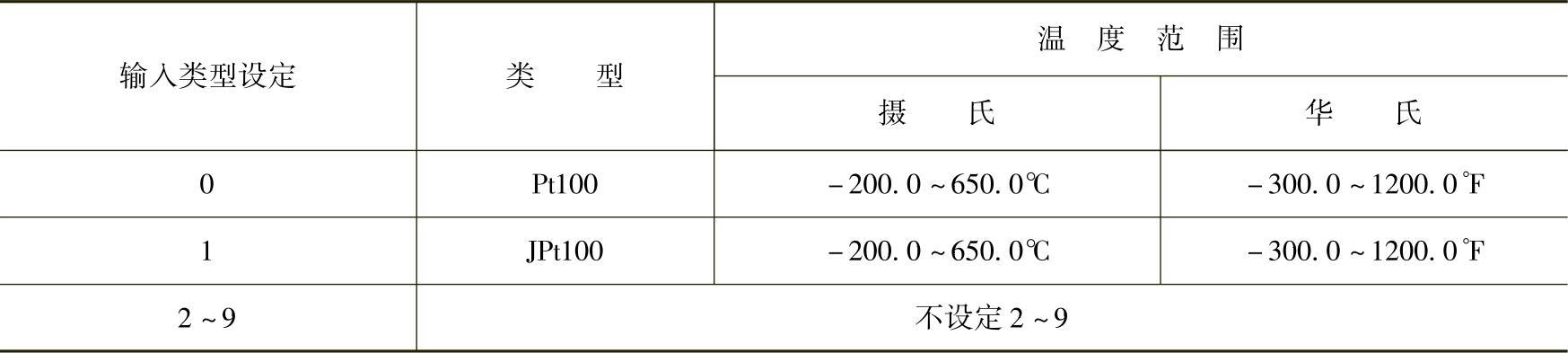
(2)设定输入类型。可用面板上的输入类型开关,选定在温度控制单元的输入类型。其间关系见表4-14(用于热偶)及表4-15(用于热阻)。
表4-14 输入类型开设定(用于热偶)
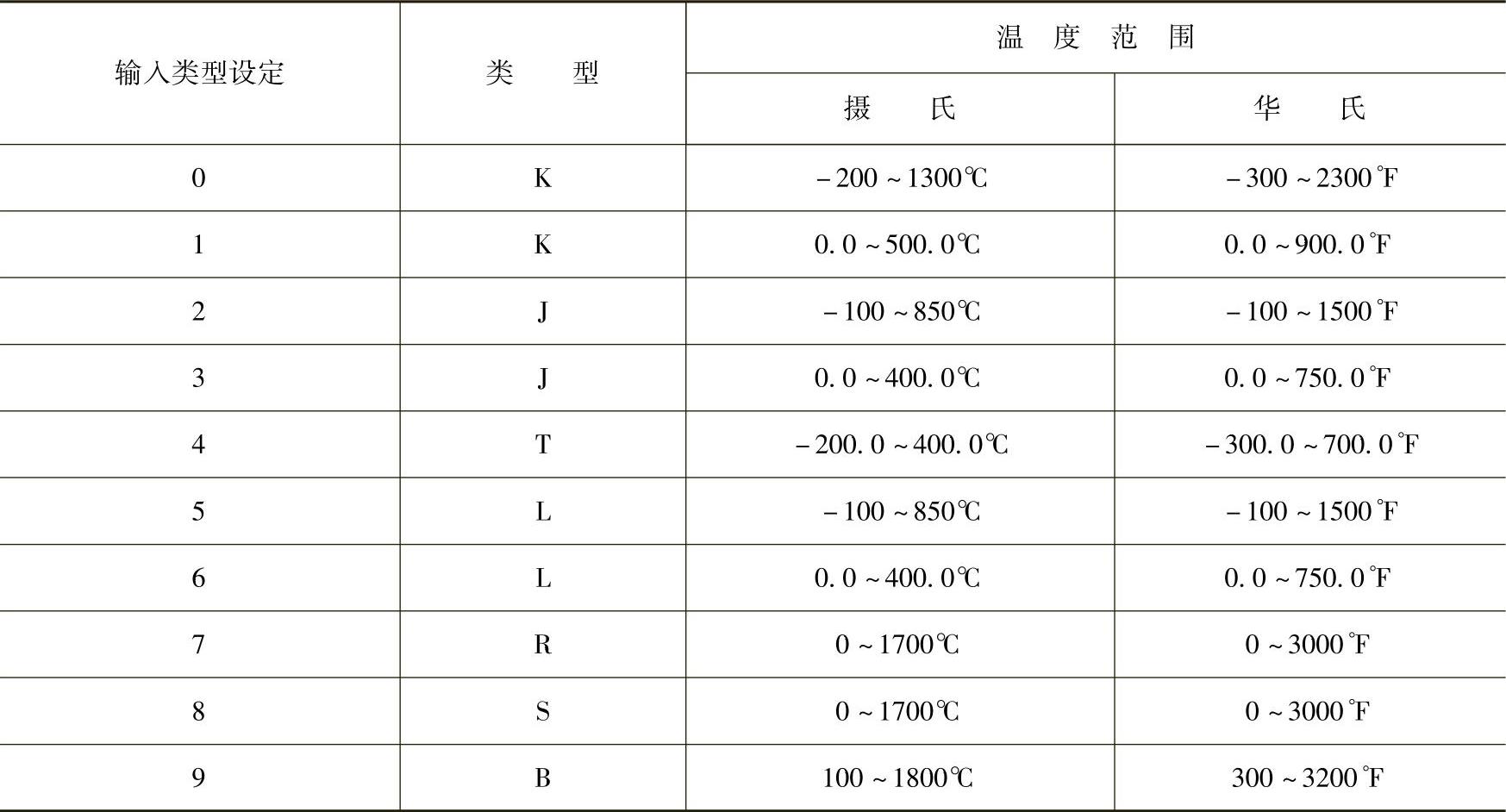
表4-15 输入类型开设定(用于热阻)
例:对热偶型的单元,如将单元前面板上的开关设定到1,则输入为K型热电偶(0.0~500.0℃)。
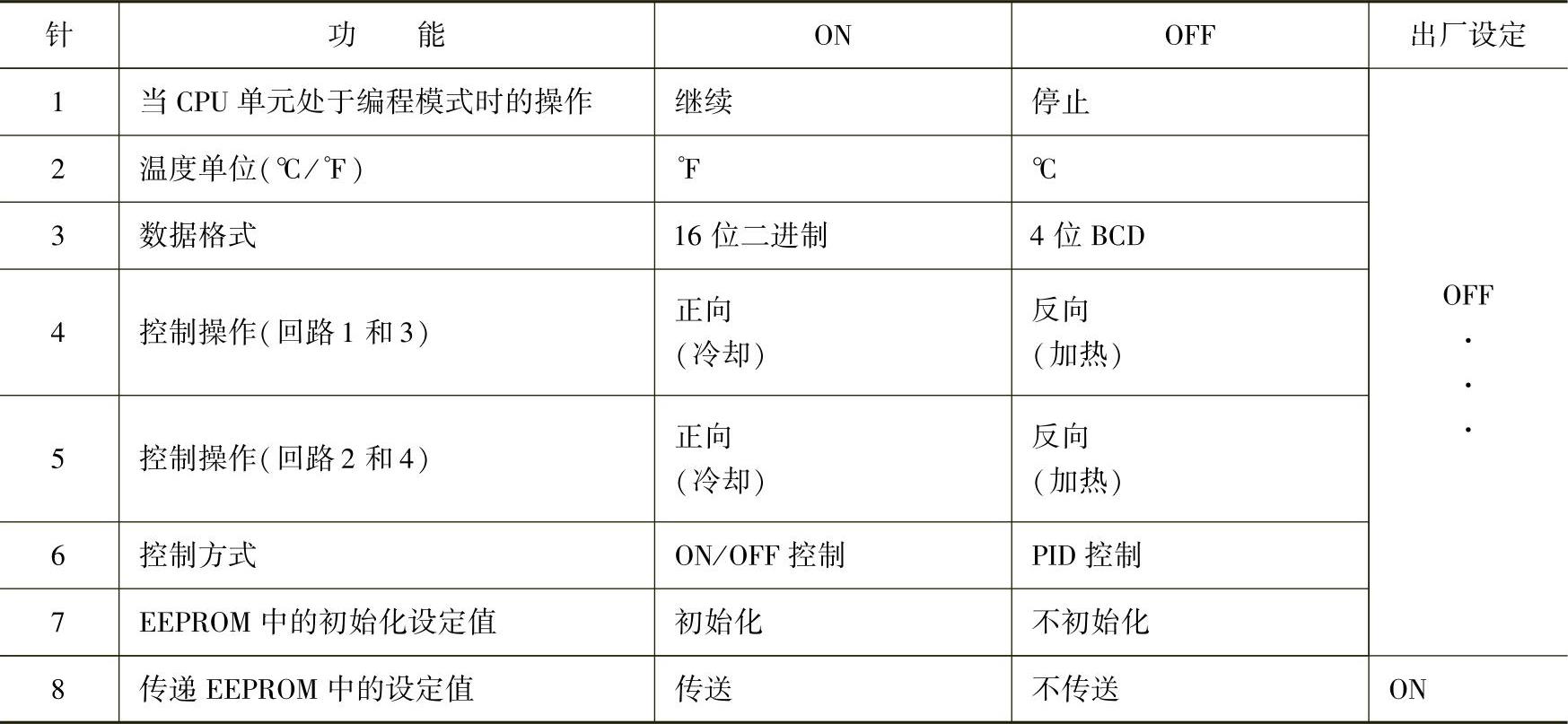
(3)设定控制功能。用面板上的DIP开关(图4-73,在右边为ON),按要求作控制功能的设定。DIP开关各针的作用见表4-16。
例:如针2置OFF,则选择的温度单位为摄氏度;而针3置为OFF,则选择的数据格式为BCD码。等等。

图4-73 DIP 开关
表4-16 DIP开关设定
(4)按要求接线。
(5)接通PLC电源。
(6)创建I/O表。
(7)在分配的DM区内分配给单元的字中进行初始设定。
(8)再做一次(断开再合上)PLC供电循环,使设定生效。
(9)编程。
按要求编写有关程序。如单元号设为1,要求编一个把过程值(PV)分别存储到D100~D103中的程序。
由于本例单元号为1,回路1、2、3、4的PV值的地址分别为2013、2014、2023及2024。回路传感器出错标志位分别为201814、201914、202814及202914。只要相应的传感器不出错,就要把有关数据予以存储。这程序是很简单的,如图4-74所示。

图4-74 存储程序
(10)PID参数整定。
PID参数可手动设定,也可自动整定。
1)手动设定。较简单,按要求,将比例带(P),积分时间(I)和微分时间(D)等值,设定到分配给单元的DM字中,即可。
2)自动整定。自动整定使用的是有限周期法,通过强制改变操作变量来测定控制系统的特性,以确定最佳的PID常数。
自整定起动由PLC控制。起动后的计算由单元自行实现。求得自整定的参数后传送、保存还由PLC控制。
具体步骤是:
(a)将AT起动位,如回路1使n+2的02位转为ON,起动自动整定。
(b)单元进行自动整定。
(c)自整定完成时,将求得的PID参数储存到分配给该单元的DM字内的操作参数输入区(求得的PID参数从温度控制单元传送到CPU单元)。
所以,要进行自整定,要有相应的PLC程序。图4-75即为一个程序实例。它用的单元为CJ1W-TC001温度控制单元。单元号设为0,用于回路1的PID参数自整定。
注:1.回路1AT标志为CIO(n+8)的位03,回路1PID常数计算标志为CIO(n+8)的位10,而回路1保存完成标志为CIO(n+8)的位15。
2.回路1AT起动位为CIO(n+2)的位02而回路1改变PID常数位为CIO(n+2)的位13。
3.当改变PID常数位转为ON时,PID常数计算标志将为OFF。
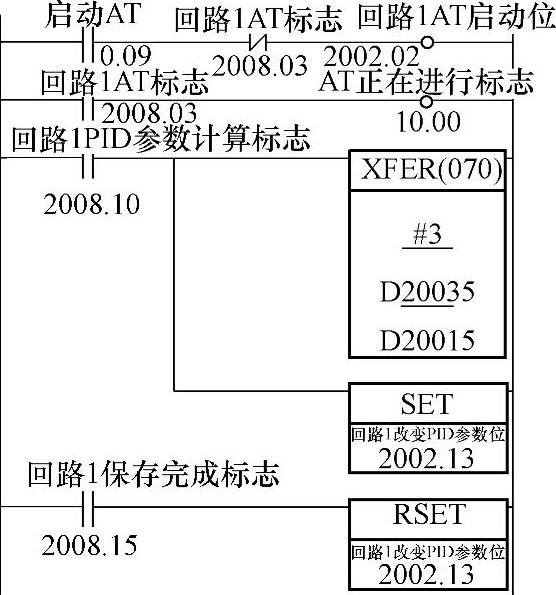
图4-75 自整定程序实例
4.如果DIP开关的第8针设定为ON,则在初始化时单元的EEPROM中的设定传送到CPU单元,必须将回路的保存位转为ON以将新的设定保存到温度控制单元的EEPROM。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。