



开环特性有静态特性及动态特性两种。静态特性是指,系统状态稳定后调节量(被控量)与控制量间的对应关系。而动态特性是指,系统状态在开始变化到稳定的过程中,调节量(被控量)与控制量间的对应关系。
1.静态特性
(1)控制量及干扰量与调节(被控)量间的量化关系。在本章开始时曾提到,调节量、控制量及干扰量。用定量分析看,它们之间关系为
r=f(c,t1,t2…)
这里,r为调节量,是表示被控系统的状态、行为、性能或功能的物理量,如温度、压力、转速,等;
c为控制量是,经PLC处理后、产生控制作用的输出量,如模出单元的现值,脉冲量的脉宽(占空比),开关量输出的工作时间与工作周期比等。简单的控制系统一般仅一个控制量;
t1,t2…是使系统的状态与行为产生所不希望变化的一些物理量,如负载电流、力矩。干扰量一般较多,但主要的可能也不多。
(2)开环放大倍数K。调节量增量与控制量增量之比。如调节量与控制量是线性关系,则K为常数,否则,K将随着控制量变化有所变化。
控制量可以是模出单元的输出值,也可是(如为脉宽调制输出)脉宽值,或别的量。依系统的构成而定。
调节量也可用模拟量输入,或脉冲量输入表示。前者,如模入单元的现值。后者,如脉冲量输入的频率。对应的也可有相应的相对的K值。也要按照系统构成而定。
图4-24所示为某电动机转速控制系统的调节量(脉冲频率,用以反映被控制电动机的转速)与控制量(模出单元输出现值,用以控制电动机转速)间的一个典型的关系。只是像这样完全线性的关系是不多的。
这里有两点要说明:
1)PLC模出单元有输出值,但可能系统仍无输出,即脉冲频率为0,系统输出存在死区。如该图在0~1F之间时,脉冲频率均为0。
2)输入输出关系曲线,即特性线是离散的,纵横坐标都应为整数值。(https://www.xing528.com)
K值反映控制系统的灵敏度。K值大,说明控制量不大的变化,可能会产生较大的调节量的变化。
此外,系统的扰动量对调节量也会有影响。这可用开环扰动系数T1、T2……表示。
开环扰动系数T1、T2指,调节量与某扰动量之比。如扰动量与控制量是线性关系,则T1、T2为常数,否则,T1、T2将随扰动量不同而有所不同。
T值反映干扰量对系统的作用强度。T值大,说明干扰量不大的变化,可能会产生较大的调节量的变化。
但,一般讲,要弄清干扰量与调节量间的关系是不易的。
(3)输出分辨率。PLC输出的变化是不连续的,是按输出分辨率离散变化的。如PLC模出单元为12位时,其分辨率为1/4096。这意味着,模出变化(增或减)的最少值只能是总输出值的1/4096,比此再小是不可能的。
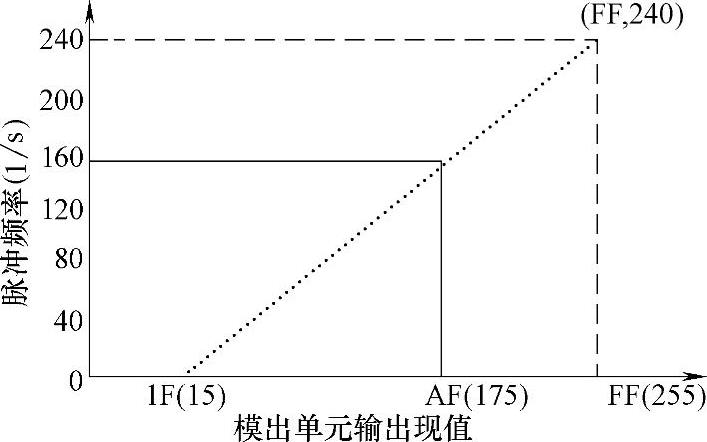
图4-24 电动机的转速与控制量关系
与这个对应的系统输出,即调节量的变化也将是离散变化的。其变化的最小值也将是调节量最大变化量的1/4096。
存在这个离散性说明,要使系统的调节量无误差地处于任一要求的状态是不可能的。但是,这个误差是可控制的。提高模入、模出单元的分辨率即可减少这个误差。
2.动态特性
由于系统是开环的,输入与输出的对应关系又是惟一的,所以,开环动态特性总是稳定的。常规(线性、连续)的系统开环动态特性多是用频率特性衡量,即在其输入端人为地加上单位幅值不同频率的正弦信号,看其正弦输出的幅值变化及其与输入正弦信号的相位差。即所谓幅频特性及相频特性。
而对PLC控制的系统,有“误差”、“断续”及“时延”的特点,不方便用频率特性去反映它的开环特性。最简单是用响应时间,即系统从开始变化到稳定的时间衡量。具体的指标可以是:每单位控制作用,即PLC模出单元的每一分辨率的变化,到系统稳定所需要的时间。显然,从系统对控制作用反应的快速性讲,这个时间是越小越好。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。