



一般讲,对PLC模拟量控制系统的要求,都是看在某种典型输入信号下,其被控量变化的过程。例如,自动调节系统,就是看扰动作用引起被控量变化的过程;随动系统就是看被控量,如何克服扰动影响,跟随给定量的变化而变化的过程等。对每类系统被控量变化过程的共同要求是稳定性、准确性和快速性。即:稳、准、快。
1.稳定性
稳定性一般指,系统的被控量一旦偏离期望值,则应随时间的增长逐渐减小或趋于零。对于稳定的自动调节系统,其被控量因扰动而偏离期望值后,经过一个过渡时间,应恢复到原来的期望值;对于稳定的随动系统,被控量应能跟踪给定量的变化而变化。反之,不稳定的控制系统,其被控量偏离期望值后,将随时间的增长而发散。
所以,稳定性是保证控制系统正常工作的先决条件。稳定是所有控制系统首先要满足的要求。不稳定,被调节量老是变化不定,以至于产生振荡,那是绝对不允许的。
2.准确性
准确性是指,当过渡过程结束后,被控量的稳态值与期望(给定)值一致性。实际上,由于系统结构,外作用形式以及摩擦、间隙等非线性因素的影响,以及受模拟量控制与数字量相互转换分辨率的限制,被控量的稳态值与期望值之间总会有误差,称为稳态误差。在实际上,完全没有这个误差是不可能的。
这个稳态误差小,则精度高。使这个误差应尽可能小,这也对控制的基本的要求。精度当然越高越好。但也要有个合适的“度”。一般讲,合乎要求也就可以了。
3.快速性
除了稳定性、准确性,在多数情况下,还对过渡过程的形式和快慢要有要求,一般称之为动态性能。例如,对用于稳定的高射炮射角随动系统,虽然炮身最终能跟踪目标,但如果目标变动迅速,而炮身跟踪目标所需过渡过程时间过长,就不可能击中目标;对用于稳定的自动驾驶仪系统,当飞机受阵风扰动而偏离预定航线时,具有自动使飞机恢复预定航线的能力,但在恢复过程中,如果机身摇晃幅度过大,或恢复速度过快,就会使乘员感到不适;函数记录仪记录输入电压时,如果记录笔移动很慢或摆动幅度过大,不仅使记录曲线失真,而且还会损坏记录笔,或使电器元件承受过电压等等。
总之,快速性是指系统实际值偏离要求(设定)值时,系统能很快(过渡时间短)而又平稳(无振荡,或振荡幅度小、次数少)地回到设定值。
控制过程品质的定量指标有:时域指标、频域指标及积分指标。
4.时域指标
它用在设定值阶跃扰动时,系统的控制量随时间的变化过程反映控制品质。图4-14所示的即为这个过程。从图可看出控制量在时域上的变化过程。
图中表示的有关时域品质指标有:
(1)最大动态偏差,图中为B1,及百分率超调量σ。后者用最大动态偏差与稳态值之比:
σ=(B1÷D)×100%
这个偏差当然越小越好。
(2)调整时间ts。从干扰发生起到控制量与其新的稳定值之差在±(2~5)%之间,并不再超出这个范围所经历的时间,图中为ts。这个时间当然越短越好。
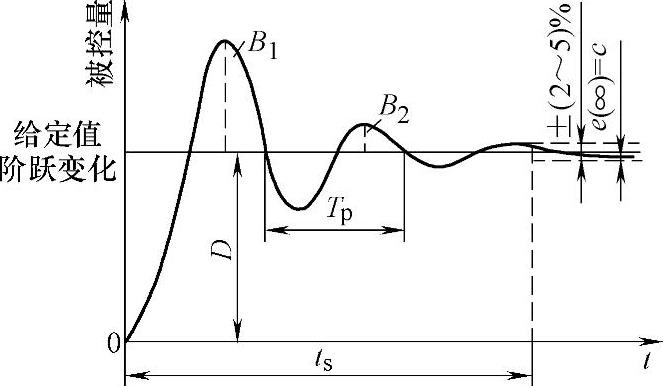
图4-14 控制量在时域上的变化过程
(3)静态偏差e。过渡过程结束后,被控量与设定值之差,图中为e。这个偏差当然越小越好。
(4)衰减率ψ。过渡过程出现震荡时,过渡过程中出现的第一与第二个峰值之比,即:
ψ=1-(B2÷B1)(https://www.xing528.com)
这个衰减率当然越大越好。
(5)震荡周期Tp。过渡过程出现震荡时的震荡周期,图中为Tp。这个周期当然越短越好。
时域指标较直观,比较好理解,但难于直接求出它的具体的值。所以,在多数情况下,还是要用频域指标。
5.频域指标
它用系统的开环频率特性代表控制品质。具体是,在不同频率的单位信号作用下,系统开环时,其输出对信号的响应特性,即系统输出的幅值及它与作用信号的相位差。图4-15为系统开环频率特性图,图4-16为幅频特性曲线。从图可看出控制量在频域上的变化过程。
用它代表控制品质的指标有:
(1)增益裕度和相角裕度,这两个是衡量控制系统稳定度的指标。如图4-15所示,增益裕度为矢量轨迹与实轴相交的那一点的增益的倒数,为1/α。相角裕度为矢量轨迹上增益为一的点偏离负实轴的角度,图中为γ角。
(2)共振频率。相应于系统幅频特性上增益最大时的频率。图4-16其上的ωr即为共振频率。

图4-15 增益裕度和相角裕度

图4-16 幅频特性
(3)截止频率。增益比为0.707时的频率,图中为ωc。
(4)最大增益比。幅频特性中增益最大的值,图中为Mp。
6.积分指标
用积分指标可综合反映控制系统的稳定性、准确性及快速性。特别是用计算机分析系统时更为有效。常用的指标有:
(1)误差e(t)积分值。
(2)绝对误差|e(t)|积分值。
以上两项综合反映了过渡过程的时间与偏差。
(3)误差(e(t))平方积分值。
(4)绝对误差|e(t)|和时间乘之积分值。
为使控制系统具有较高的稳定性、准确性及快速性,所有这些值都应尽可能的小。一般控制有这个要求,用PLC控制也不例外。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。