



定时控制简单,而又能完成较复杂的控制。但它没有反馈,是开环控制。前一时间段动作完成与否,次一时间段的控制命令照样发出。工作可靠要求很高的场合不好用它。
动作控制是反馈控制,前一个动作未完成,次一个动作不会开始。较安全、可靠。但用它去实现较复杂的控制比较难。
这里引入的步进程序,靠步的推进实现控制,而步的推进则用“步动作完成”信号激发。这种控制可用步控制输出,能实现复杂动作。同时,他又有“步动作完成”信号反馈,是闭环控制,较为可靠。
实现步进控制的方法很多,这里仅介绍两种较简单的方法。
1.脉冲步进
图2-72所示为“脉冲步进”梯形图程序,操作数也是用符号地址。它是靠基本逻辑指令实现步进控制。
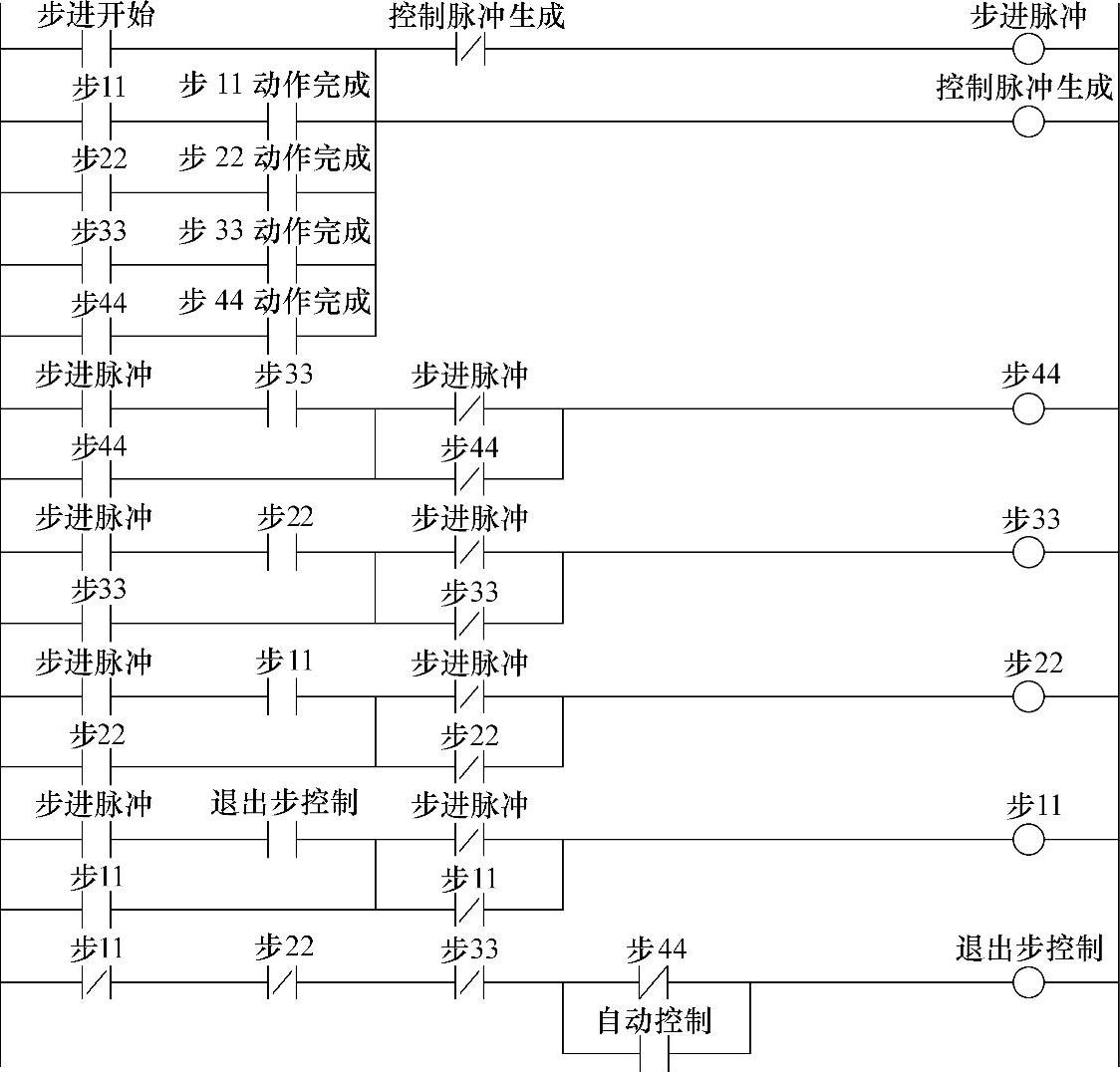
图2-72 脉冲步进程序
从图知,此程序主要由脉冲生成及步进两个部分组成。
在脉冲生成部分可知,当“步进开始”或“步”及相应“步动作完成”信号出现,都将产生“步进脉冲”信号。
在步进部分可知,这里暂设了四个步:“步11”、“步22”、“步33”、“步44”。如需要可增加。“步11”为初始步。当所有步未激活(均为OFF),则“退出步控制”为ON。
此时,如“步进开始”ON,则将有“步进脉冲”ON一个扫描周期。这将使“步11”激活,处于ON状态,进入工作。而其它步仍为OFF。
当步11动作完成后,“步11动作完成”ON,将再有“步进脉冲”ON一个扫描周期。这将使“步22”激活,处于ON状态,进入工作。而使“步11”OFF,其它步仍为OFF。即步控制前进了一步。
这里每一步的控制逻辑与“单按钮起、保、停”逻辑形式不同,但本质是相同的。“各个步”也是“双稳”,无“步进脉冲”信号,它ON成立,OFF也成立。一旦有脉冲信号,则转换成相反的状态。
随着步动作完成而产生的脉冲信号,步将逐一推进,直到最后一步。最后一步完成时,如“自动控制”ON,则又起动第一步;如“自动控制”OFF,则推出步进控制,程序回到原状态。(https://www.xing528.com)
提示:这里步程序是按倒序排列的,控制“步44”逻辑,反而排在“步11”之前。可检查,如不是这么安排,按步推进的目的是达不到的。这也说明PLC指令的安排顺序是有讲究的。
2.移位步进
图2-73所示为“移位步进”梯形图程序,操作数也是用符号地址。它是靠移位指令(SFT)实现步进控制。
从图知,此程序由四个梯级组成。
第一梯级,用以产生“移位脉冲”信号。
第二梯级,用以当步进完成后(这里设了四步,如需要,可增多),复位,把0传给“移位通道”。
第三梯级,用以产生“移位通道等零”信号。在“移位通道”字的内容为零时,“移位通道等零”为1。
第四梯级,用以实现移位步进。这里的复位信号为“P_Off”(常OFF),故只要“移位脉冲”从0转到1,则把“移位通道等零”的状态(0,或1)移入“移位通道”的第0位,而原“移位通道”的第0位状态,移给“移位通道”的第1位……依次移位,直到“移位通道”的第15位溢出。
显然,它与第三梯级配合将是,当“移位通道”为0时,“移位脉冲”从0转到1,向“移位通道”移入1;而当“移位通道”移入1后,移入0;直到复位。
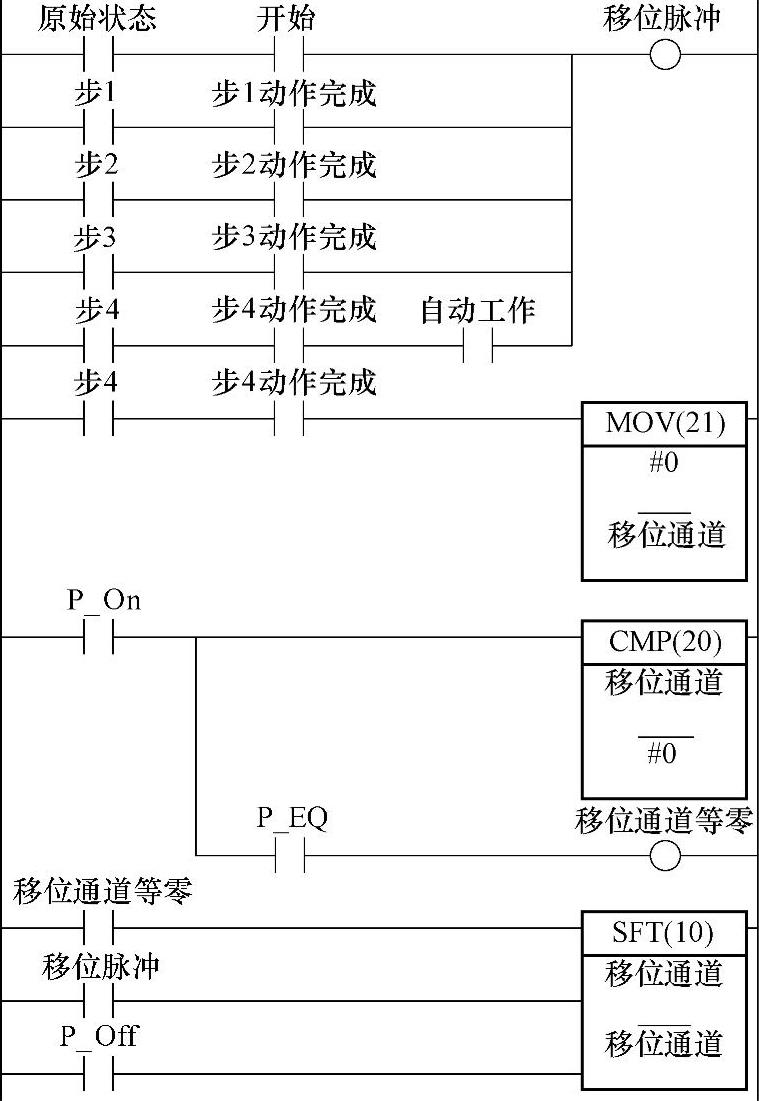
图2-73 移位步进程序
可知,只要把“移位通道”0位对应于步1,1位对应于步2……则这里的移位过程,也就是步进过程。这里“移位步进”也因此得名。
这里还有“自动工作”控制。它ON时,将实现自动工作,即完成最后一步时,会产生“移位脉冲”,起动第一步。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。