



1.中等精度光陀螺的长程曲线实验
实验采用中等精度光陀螺,精度为0.5°/h。解算所得轨迹用地理经、纬度表示如图7-21所示,实际轨迹的卫星地图如图7-22所示。解算轨迹经过修正后,终点位置的经纬度误差见表7-4。
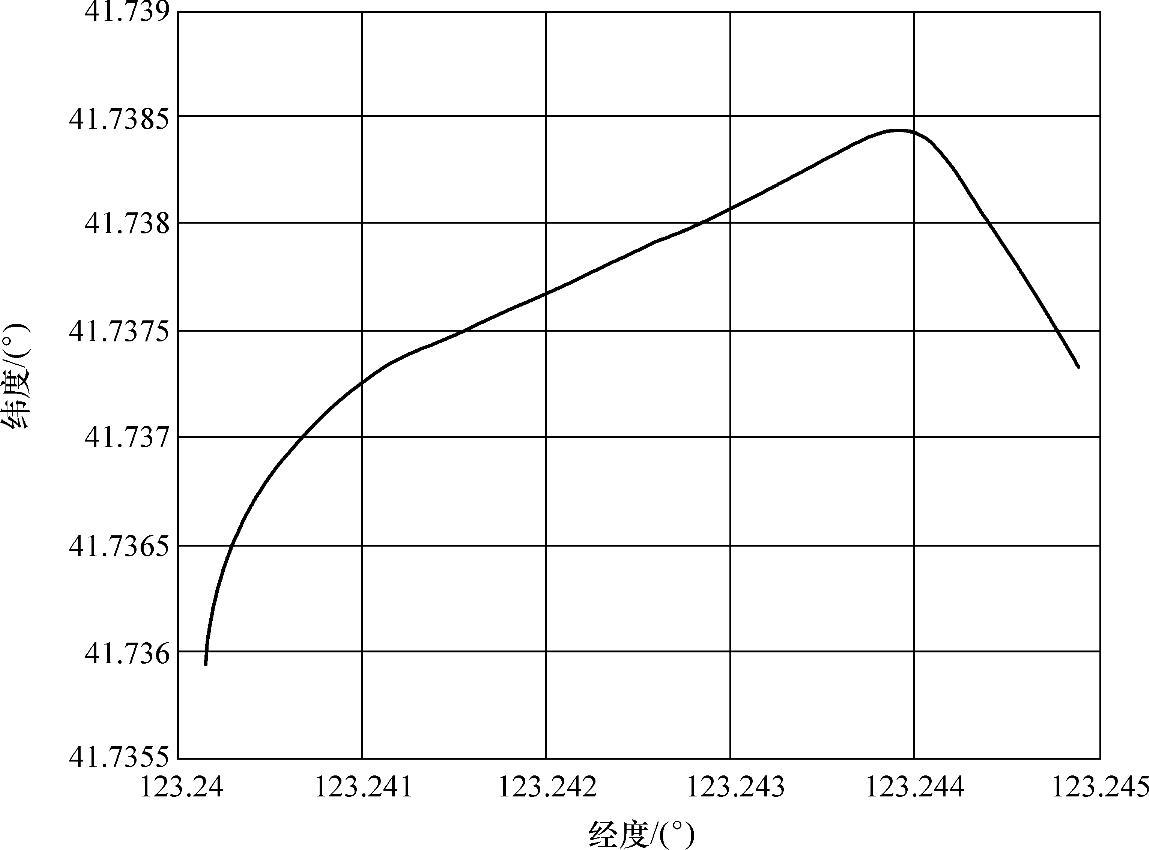
图7-21 经、纬度表示解算的600m轨迹解

图7-22 卫星地图上表示的600m实验轨迹
表7-4 终点导航解算信息与误差

由表7-4可以看出,对于600m的实验轨迹的测量,经、纬度误差均小于1″,里程误差小于被测量里程的1%。
对于实验图中绕隔离带位置,其地理坐标为北纬41.7375°,东经123.2417°。轨道漂移距离经测量为0.6m距离。在导航坐标系下表示如图7-23所示。
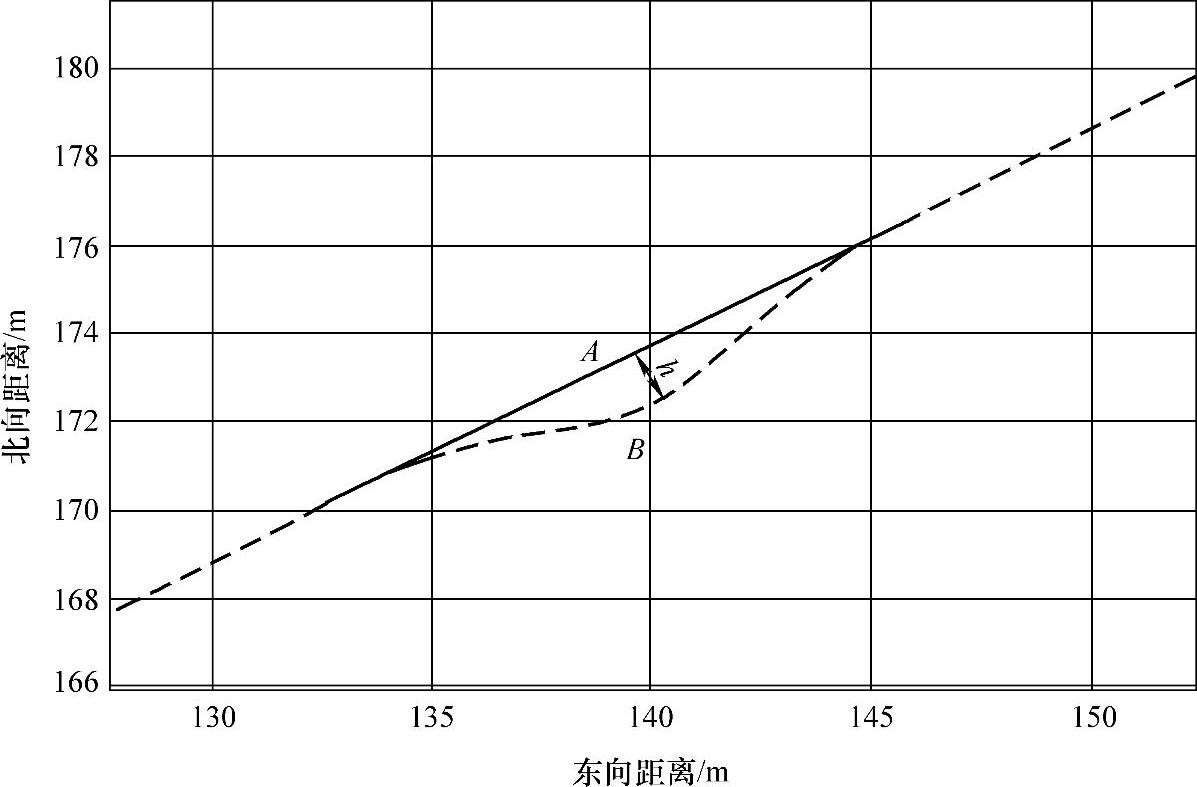
图7-23 实验中弯折的测量
图中表示的是解算得到的弯折点的轨迹,如虚线所示。A、B两点间的距离表示弯折的最大幅度。A点坐标为(139.2580m,173.3326m),B点坐标为(139.8115m,172.2290m),两点间距离为0.563m。实际轨迹中的弯折段测量得到的距离为0.592m。所以在长直轨迹的测量中,该方法依然能够实现对管道弯折等量的测量和定位。
2.中等精度光陀螺的长程环形轨迹实验
表7-5为实验轨迹的地理信息。
表7-5 实验轨迹地理信息

利用建立起来的误差模型,对测量误差进行修正。修正后,结合解算得到的姿态信息和里程轮测量得到的里程信息,对行进轨迹进行解算。对于平面运动,主要是对航向误差进行修正。图7-24所示为修正前后的航向角。
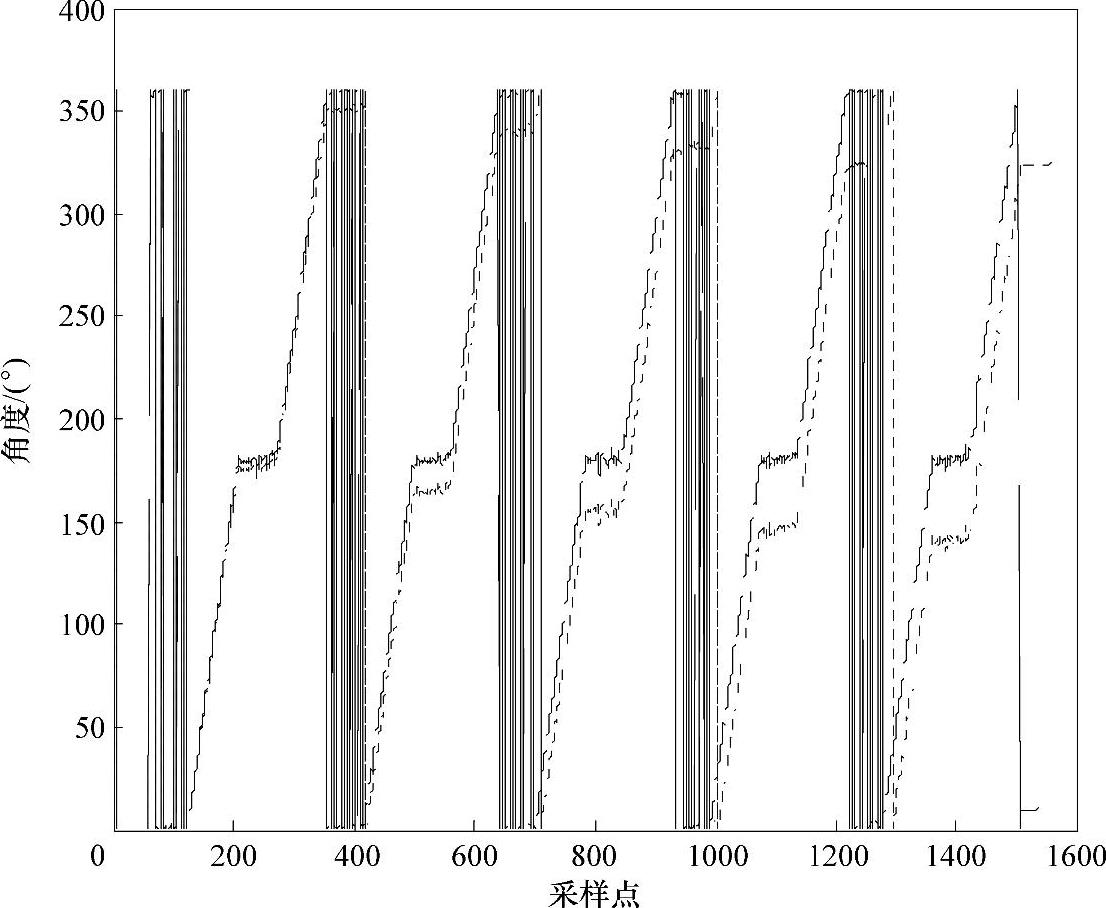
图7-24 修正前后的航向角
如图7-24所示,虚线为未做磁标记处分选修正的航向角解算结果,可以看出在修正前,由于陀螺仪的漂移误差,航向角误差不断增加,对于环形轨迹两直线段轨迹,航向角之差无法达到180°。修正后所得的环形轨迹的经、纬度表示如图7-25所示。
图7-25所示对应的卫星地图如图7-26所示。修正前后计算所得终点的经、纬度误差见表7-6所示。
经过修正,误差比率减小到0.16%,为修正前误差的8.2%。
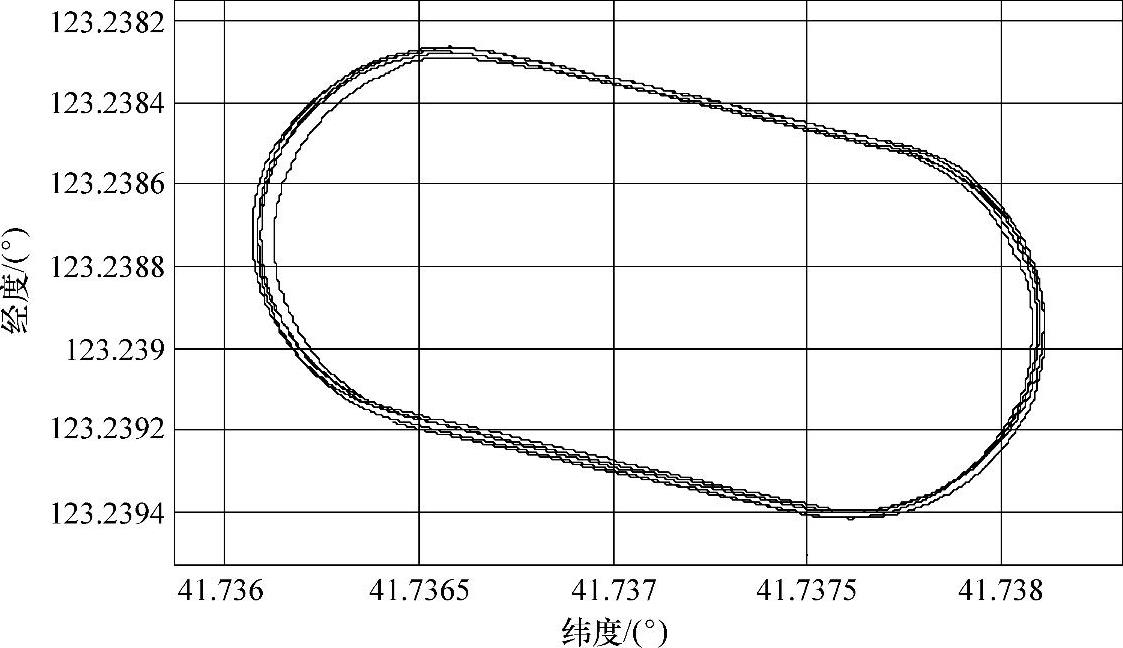
图7-25 经、纬度表示的修正后的环形轨迹

图7-26 卫星地图上的实验轨迹(https://www.xing528.com)
表7-6 经、纬度误差

3.高精度光陀螺的长程实验
高精度IMU元器件精度达到0.02°/h,相对于之前的中等精度光纤陀螺0.5°/h提高很多,但与公认的高精度IMU(可以自行指北)的精度0.005°/h相比还有不小的差距。
该试验平台依次经过采样点1~25,(采样点2~5形成一个近似半圆)形成封闭曲线,理想的惯性导航系统解算之后生成的轨迹应封闭,实测采样点1和25之间的距离为判断算法精度的重要依据,如图7-27所示。
实际解算情况如图7-28所示。
因为试验最初的经、纬度信息来自于谷歌地图,因此实际解算的经、纬度没有测绘价值,解算轨迹的相对位置信息是主要的考察对象,尤其是封闭点距离(1点和25点之间的解算轨迹图上的距离)体现了整体算法的精度(xy平面达到5m以内)。显然,实验解算图起点与终点基本吻合,里程共计1854m。俯仰角安装误差暂未考虑。相关技术参数如图7-29~图7-32所示。

图7-27 长程管道定位试验载车运行轨迹
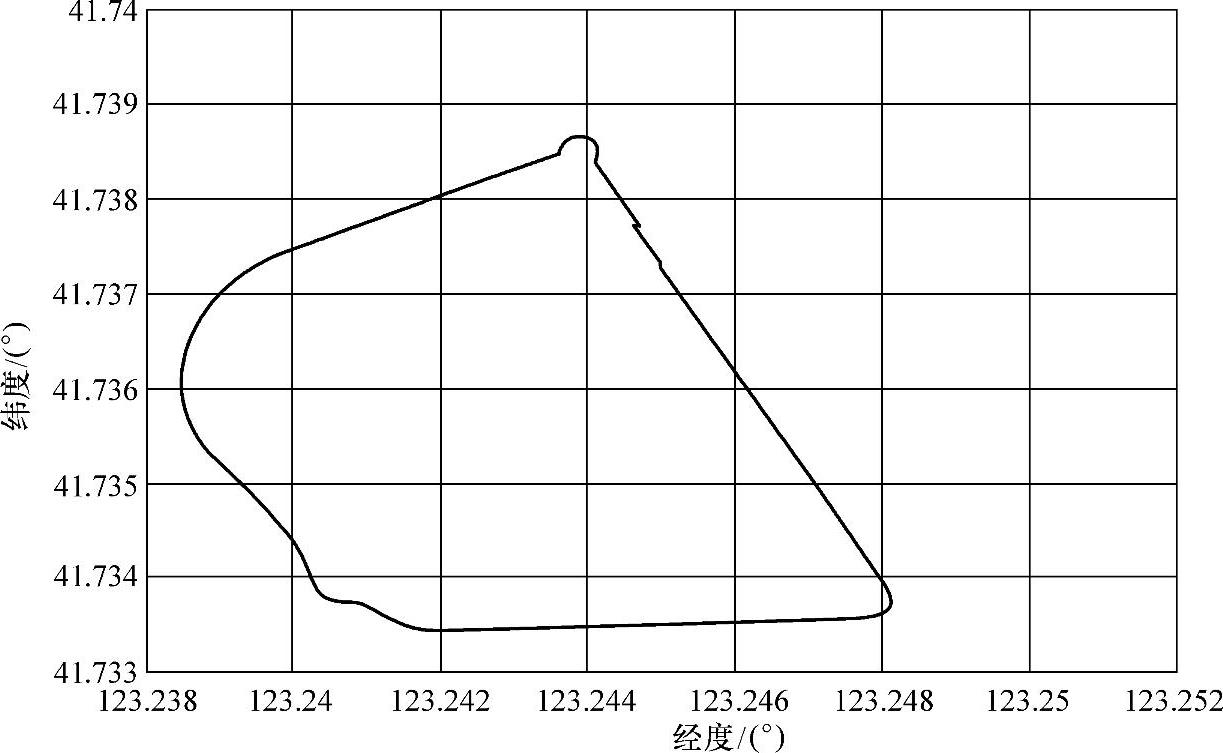
图7-28 高精度惯性导航系统长程实验解算轨迹图(经、纬度表示,xy平面)
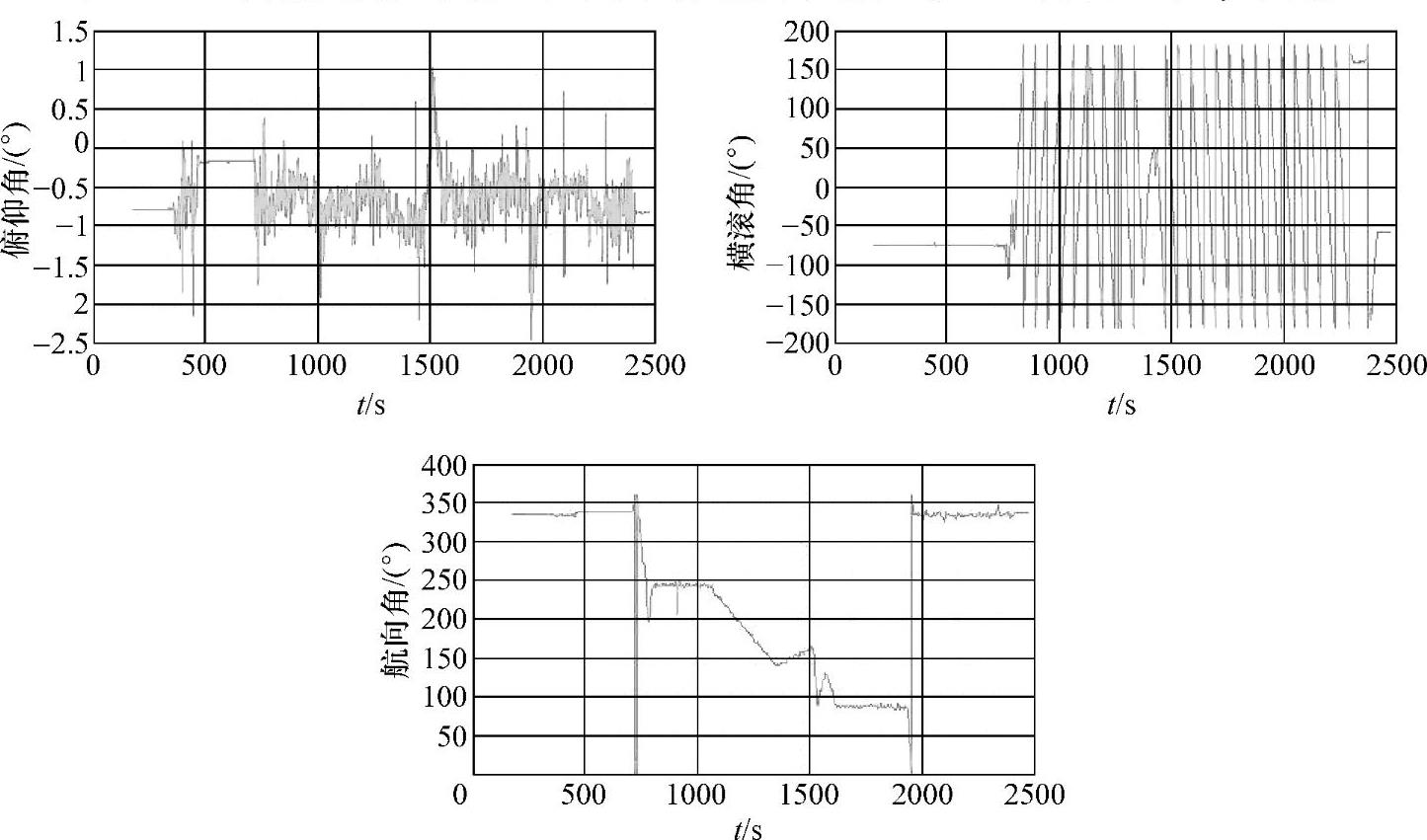
图7-29 导航全程姿态信息
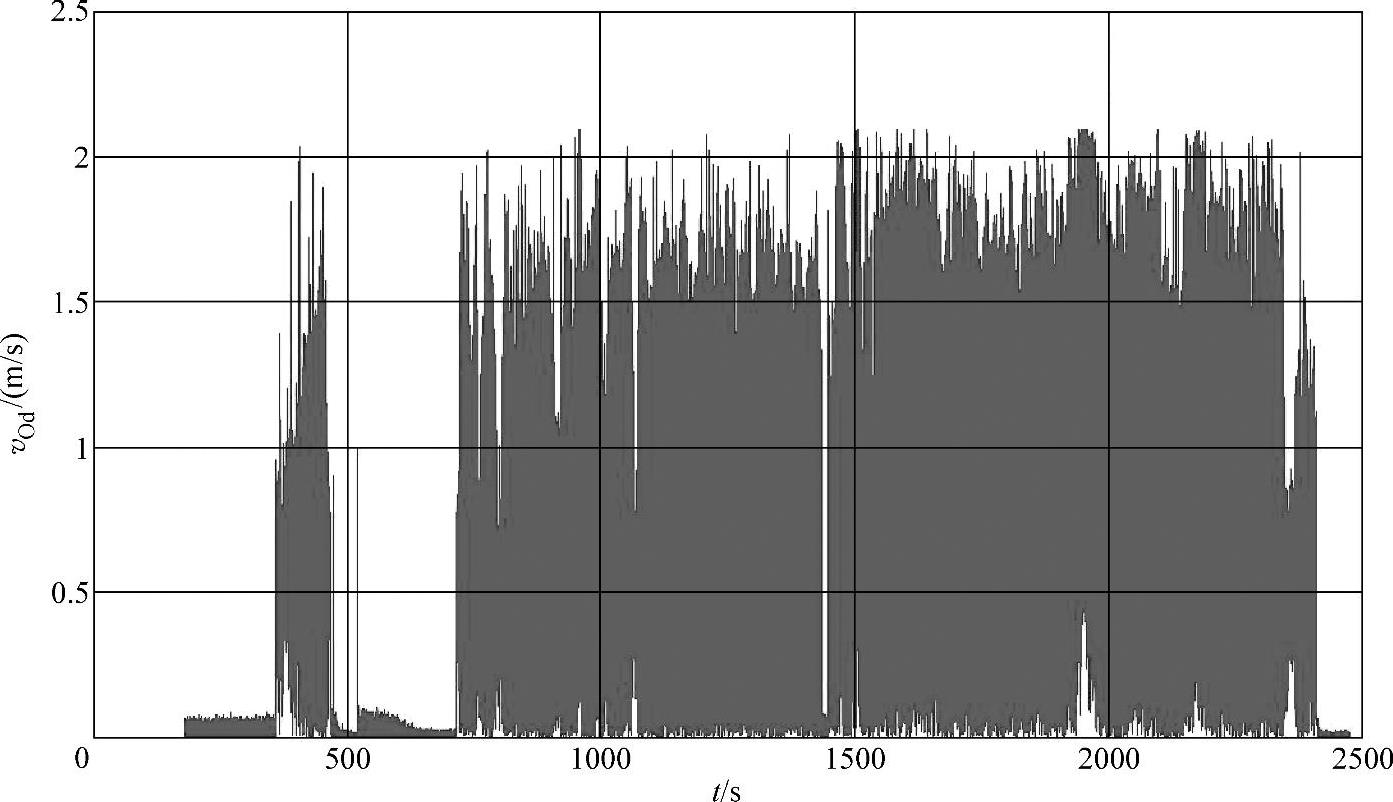
图7-30 导航全程里程轮速度输出信息
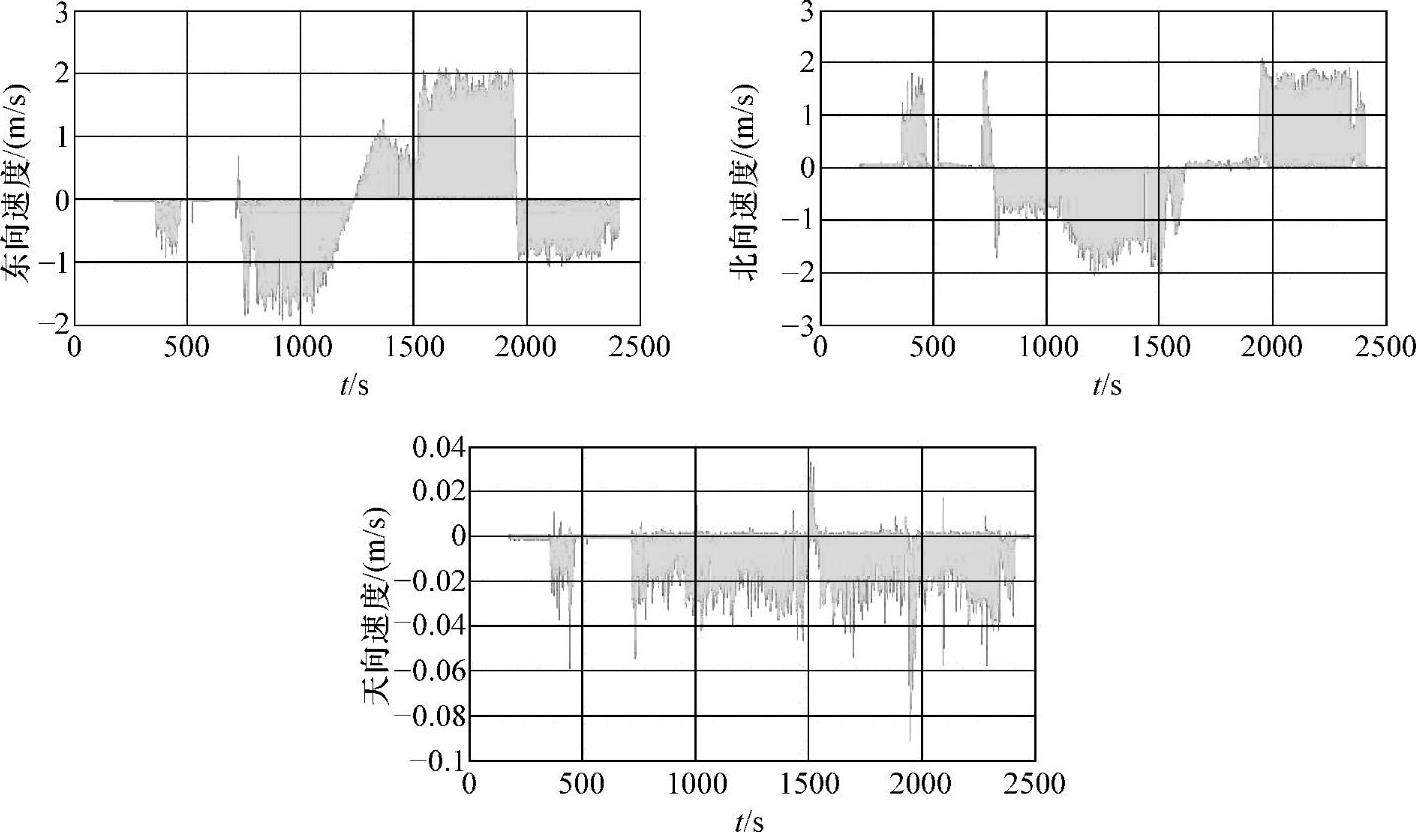
图7-31 导航系统东北天速度信息
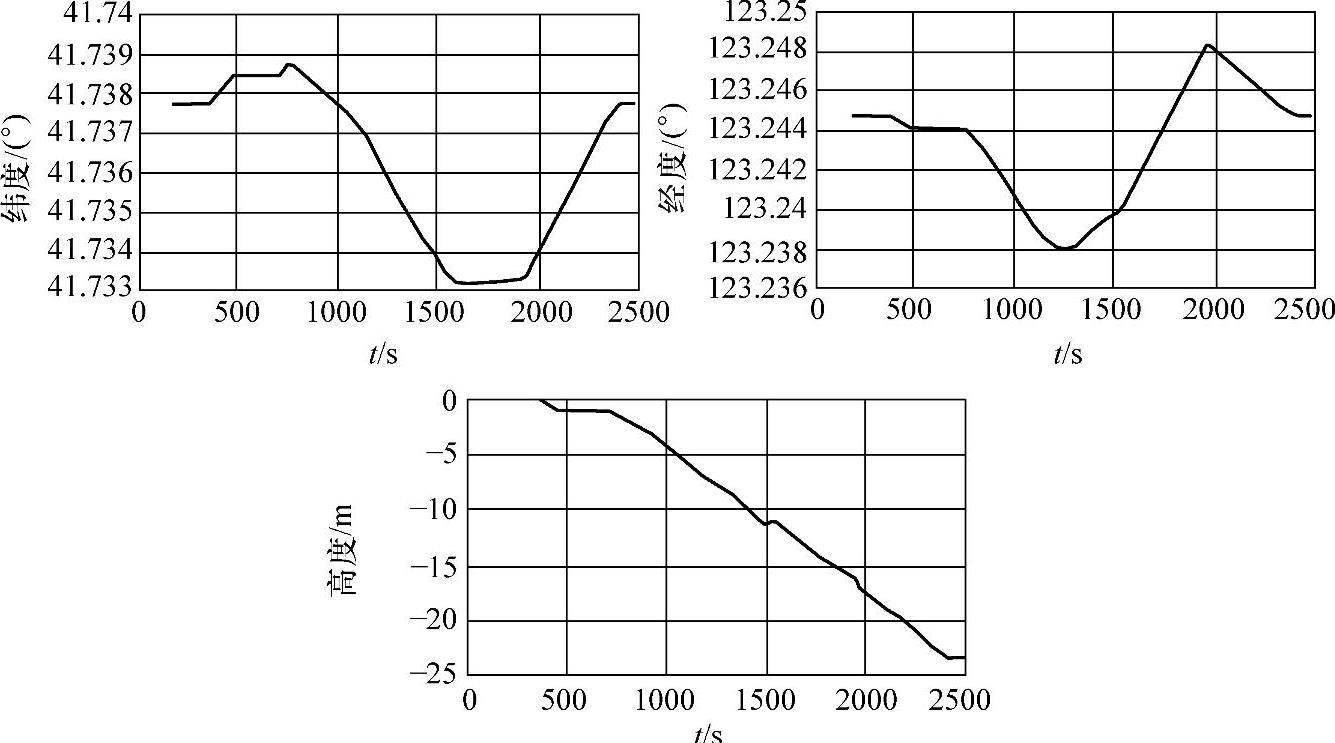
图7-32 导航系统位置信息
在上述解算中没有考虑系统安装过程中俯仰角的安装误差,而该误差从第一个采样周期开始参与解算和迭代,是造成高度信号误差较大的主要原因。因此在导航解算中人为地加入了4°俯仰角安装误差(该误差因素必然存在,在不同试验平台有不同的体现,这里人为加入的是估计值,更准确的估计算法还需继续研究),使解算精度得到较大提高,尤其是高度通道数据(俯仰角、天向速度、高度等)产生了明显的收敛,其他指标也得到改善,系统导航结果如图7-33~图7-35所示,可与图7-29、图7-31和图7-32进行对比。
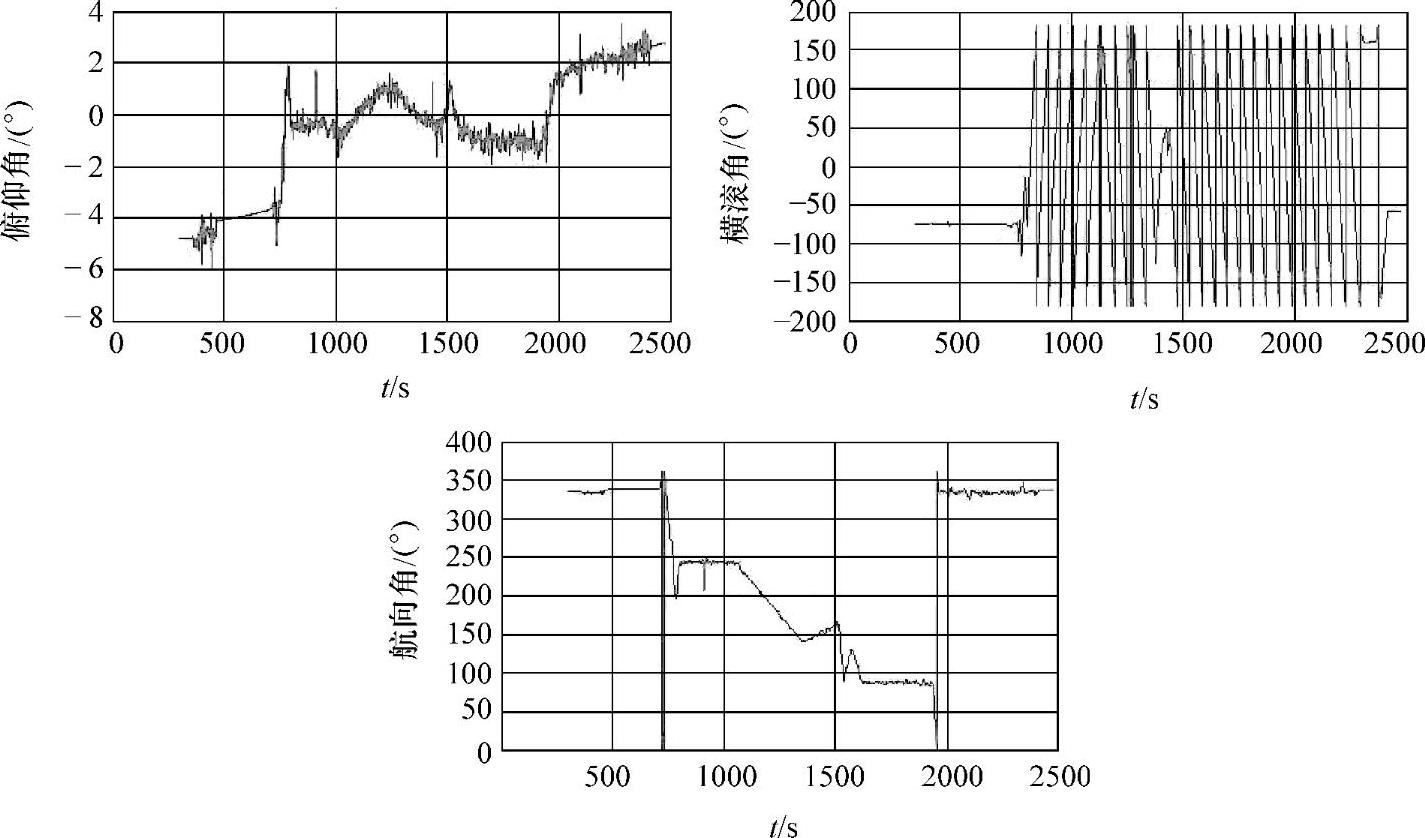
图7-33 导航全程姿态信息(加入4°俯仰角安装误差)
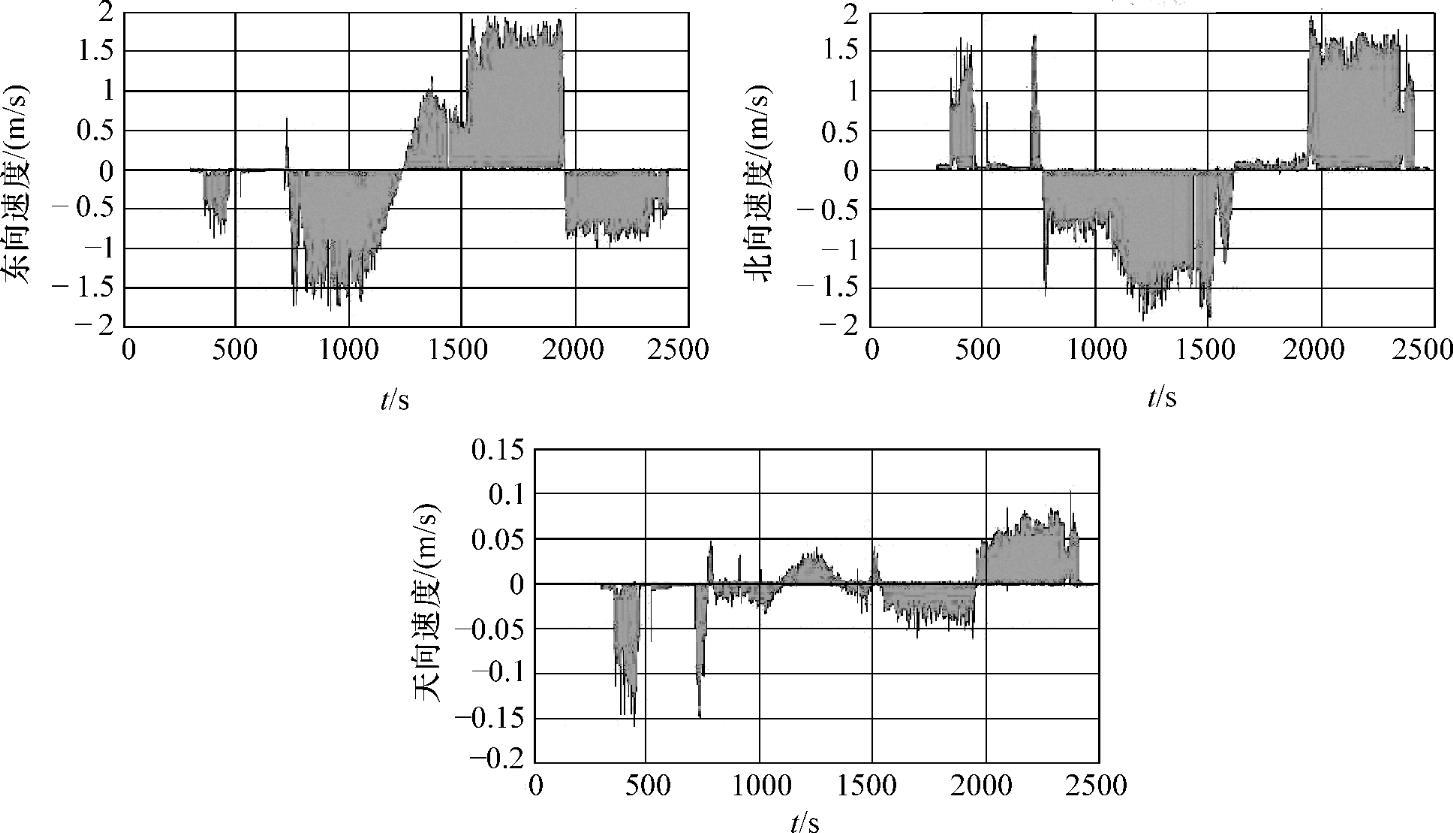
图7-34 导航系统东北天速度信息(加入4°俯仰角安装误差)
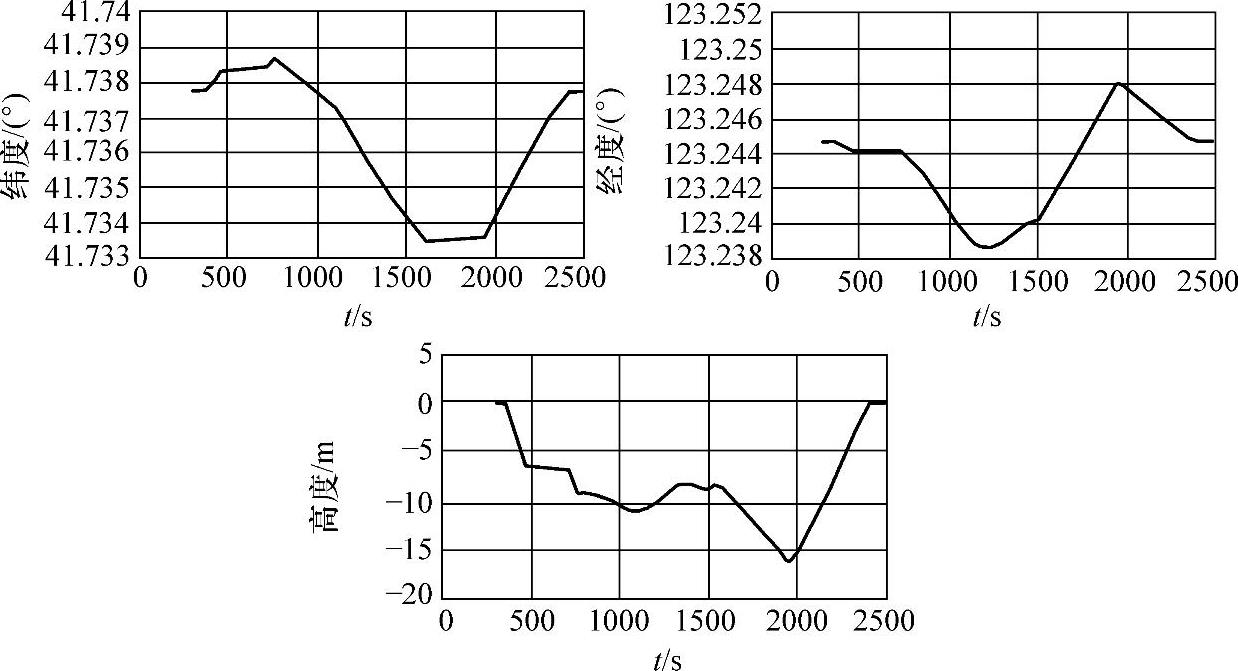
图7-35 导航系统位置信息(加入4°俯仰角安装误差)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。