



惯性系统是管道内检测方式的重要单机设备,在管道检测过程中,惯性系统实时存储内部激光陀螺仪、石英挠性加速度计的数据及里程轮数据,结合管道检测工具记录的定点磁标记数据,用于事后离线惯性/里程轮/磁标记组合导航解算,提供高精度的管道运行路线三维地理信息。结合管道检测数据,对管道故障点进行精确定位。
惯性系统实物如图7-17所示。惯性系统系统主要包含主机、地面数据后处理单元及通信电缆三部分。其中,主机包括3个激光陀螺仪、3个石英挠性加速度计、3个里程轮(外置)、高精度I/F转换单元、信号处理及存储单元(PC104)、通信接口单元、电源变换单元及结构组件。
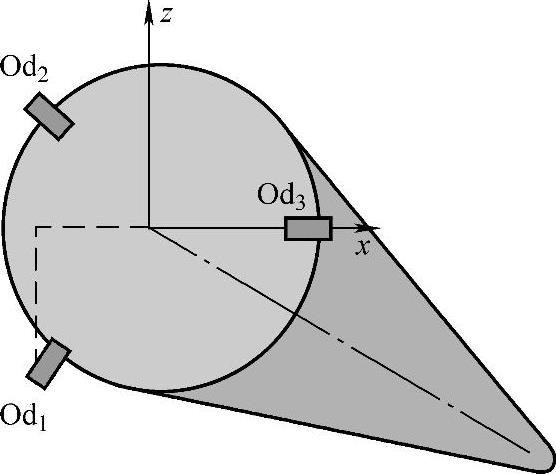
惯性系统的核心部件为三轴正交的激光陀螺仪、三轴正交的石英挠性加速度计及相关配套电路,外部辅助信号有里程轮和定距离提供的磁标记信号。陀螺仪测量空间三个互为正交方向的旋转角速率,加速度计测量空间三个互为正交方向的加速度,里程轮测量惯性系统运行方向的里程信息,并且采用3个里程轮互为冗余。惯性系统坐标系及仪表安装方向如图7-18所示,里程轮安装示意如图7-19所示。

图7-17 惯性系统实物
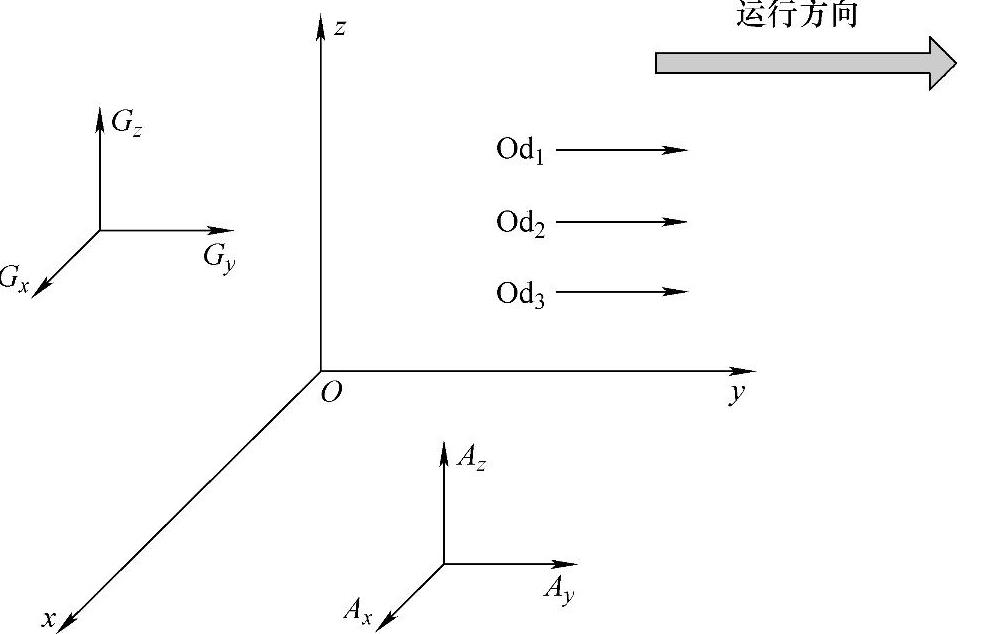
图7-18 惯性系统坐标系及仪表安装方向
 (https://www.xing528.com)
(https://www.xing528.com)
图7-19 里程轮安装示意
当管道检测工具在管道中运行时,惯性系统以一定的频率采集3个陀螺仪、3个加速度计以及3个里程轮数据并保存在存储设备中。当管道检测工具经过磁标处时,检测工具对此时刻数据做出标记。在整条管道检测完后,系统将所有数据下载到地面数据处理中心,结合地面高精度的磁标记信号,利用后处理导航软件进行数据处理及导航解算,得到整条管线的位置数据以及运行轨迹图形。
从2013年05月开始设计和生产惯性系统,在研制过程中,通过充分利用和借鉴其他同类型产品的成熟技术与经验,大大缩短了研制周期。在此基础上,主要对方案设计中提出的关键技术和难点进行了重点攻关。通过不断的探索和努力,相关问题得以解决。
惯性系统的研制过程根据阶段的不同分为产品研制过程、环境试验过程、总体匹配试验三部分。其中产品研制过程包括方案设计、产品研制;环境试验过程包括环境试验、长时间导航试验、动态跑车试验;总体匹配试验包括动态跑车试验(含里程轮)及后处理软件组合导航算法验证。
惯性系统搭载在管道检测工具PIG中,整个系统在油或气的推动下前进。PIG设计图如图7-20所示。

图7-20 捷联惯性导组合定位系统PIG设计图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。