



组合导航中应用里程信息对惯性导航系统误差进行抑制,不仅可以用来进行导航信息融合,同时可以实现导航数据测预处理。
算法原理是:将里程增量作为观测值,将状态误差作为状态量,利用卡尔曼滤波估计状态误差,采用里程校正方法对管道定位的SINS计算进行误差补偿。算法的功能图如图7-13所示。
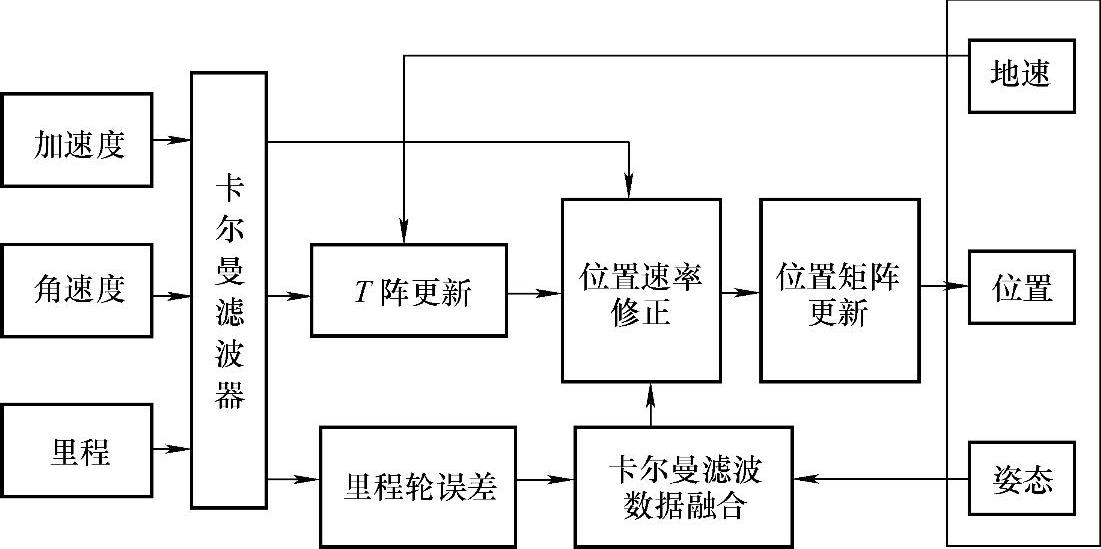
图7-13 组合导航算法功能图
在位移计算前对状态误差进行补偿,姿态误差为计算坐标系(c系)与实际导航坐标系的转换矩阵,可以用Ccn表示,即

对姿态矩阵的误差补偿表示为
Cbn=CcbCcn (7-141)
估计出姿态误差角后,利用式(7-141)可以对姿态误差进行补偿。速度和位置补偿方法为
St=Mt-Δt (7-142)
式中,St为速度和位置的真实值;Mt为SINS的计算值;Δt为卡尔曼滤波的误差估计值。利用误差补偿方法对各状态量进行修正。
建立卡尔曼滤波方程,将n系下的姿态、速度和位置误差作为状态量X,并且不同于其他惯性导航,由于采用低精度传感器,将里程轮和惯性传感器的尺度因数误差忽略不计,管道地理坐标测量系统状态量取9维,可表示为
X= ϕxϕyϕzδvnxδvnyδvnzδLδλδh
ϕxϕyϕzδvnxδvnyδvnzδLδλδh (7-143)
(7-143)
式中,δvnx、δvny、δvnz为PIG速度误差;δL为纬度误差;δλ为经度误差;δh为高度误差。
因为元器件精度较低,忽略其随机常值漂移和尺度因数误差。PIG运动示意如图7-14所示。
PIG只能沿管道向前运动,无法向上和沿侧面移动,因此PIG在b系的速度方向为:PIG的y向速度与里程轮速度相同,而x和z方向的速度为0,所以管道中运动的载体在b系的速度矢量可以用 0 vo 0
0 vo 0 T表示。将里程轮速度转换到n系,即(https://www.xing528.com)
T表示。将里程轮速度转换到n系,即(https://www.xing528.com)
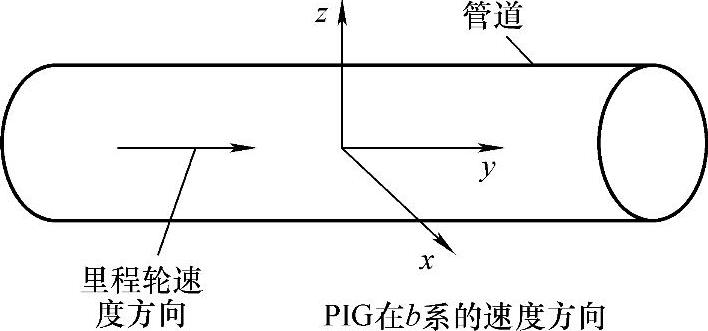
图7-14 PIG运动示意
Vno=Cnb 0 vo 0
0 vo 0 T (7-144)
T (7-144)
式中,vo为里程轮速度;Vno为通过里程轮测得的n系下的速度,将其与惯性导航计算的速度之差作为观测值Z,即
Z=Vn-Vno= Δvx Δvy Δvz
Δvx Δvy Δvz T (7-145)
T (7-145)
根据状态量和观测值建立卡尔曼滤波微分方程为

式中,F(t)为状态微分方程系数矩阵,由式(7-29)、式(7-37)、式(7-42)、式(7-43)和式(7-44)推得;L为白噪声系数矩阵;H为观测矩阵,且H= 03×3 I3×3 03×3
03×3 I3×3 03×3 ;W为状态噪声矢量,即元器件的零偏噪声,且W=
;W为状态噪声矢量,即元器件的零偏噪声,且W= εnxεnyεnz ▽nx ▽ny ▽nz
εnxεnyεnz ▽nx ▽ny ▽nz ,V为观测噪声矢量,即里程轮输出的速度误差,且V=
,V为观测噪声矢量,即里程轮输出的速度误差,且V= δvonxδvonyδvonz
δvonxδvonyδvonz 。
。
W和V为高斯分布白噪声,它们与X之间两两互不相关。将式(7-146)、式(7-147)进行离散化处理得
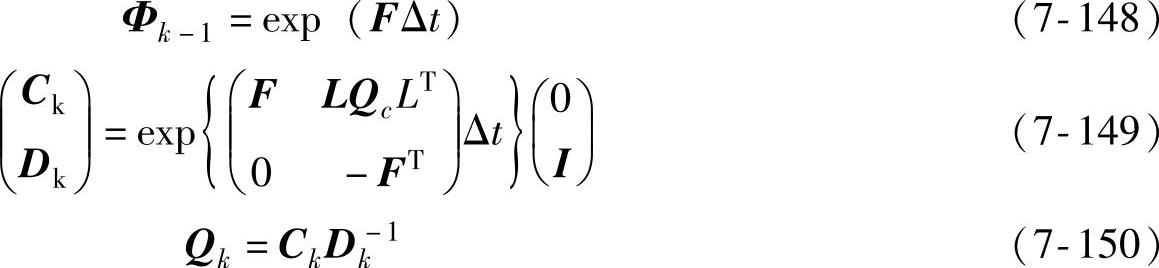
式中,Δt为卡尔曼滤波的计算周期;Qc为W的方差矩阵;Qk为Wk的方差矩阵;Ck和Dk分别为方差矩阵和转置方差矩阵。
因此得到卡尔曼滤波状态方程和观测方程为
Xk=Φk-1Xk-1+LWk (7-151)
Zk=HkXk+Vk (7-152)
式中,Φk-1为卡尔曼滤波的状态转移矩阵。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。