



在参考坐标系内研究管道内检测器(搭载有检测器的管道清管器,简称PIG)的运动和位置变化。参考坐标系包括导航坐标系、地理坐标系和载体坐标系。导航坐标系用n表示,载体坐标系用b表示,地理坐标系用t表示,惯性坐标系用i表示。地理坐标系用来表示管道的位置,设计时将PIG运动的导航坐标系看作地理坐标系。各坐标系定义见表7-1。
表7-1 坐标系定义

所有坐标系均采用正交的笛卡儿坐标系,坐标系各轴正向顺时针转动为正,如图7-3箭头所示。规定每个坐标轴的旋转正方向都与图7-3b中z轴箭头方向一致。根据b系和n系之间的相对转动关系,可以求得PIG的姿态角。姿态角表示PIG转动过程中的姿态信息,包括航向角、俯仰角和横滚角,分别用ψ、θ和γ表示。b系中旋转z轴,y轴在水平面的投影与n系y轴的夹角,即PIG前进方向与地理坐标北向夹角为航向角,数值以北向为起点,顺时针方向计算,范围为0°~360°。b系中旋转x轴,x轴与y轴确定的平面与n系水平面的夹角为俯仰角,以水平面为起点,仍是顺时针旋转为正,范围为0°~360°。b系中旋转y轴,y轴和z轴平面与n系天向和北向垂直面的夹角为横滚角,y轴顺时针为正,范围为0°~360°。
在一种参考坐标系下得到载体的测量值,现保持载体不变,改变参考坐标系,在另一种坐标系下得到同一载体的测量值,这种方法称为坐标转换。现在分析坐标转换问题,如图7-4所示,在坐标系x0y0z0中观察一定点P,坐标为(x0,y0,z0),旋转坐标系到xryrzr,在新的坐标系中求P点的坐标。
可以通过三次转动从坐标系x0y0z0变换到xryrzr。转动方法为:第一次先旋转z0轴,使x0y0平面内的直角坐标系x0y0旋转一个ψ角,得到新的坐标系xayaza;第二次旋转xa轴,使zaya平面内的坐标系旋转θ角,得到坐标系xryrzr;第三次旋转yr轴,使xrzr平面内的坐标系旋转γ角。通过三次转动最终完成坐标转换,每次转动P点的坐标都会发生变化,以第一次转动为例,P点的z坐标不变,x、y的坐标变化根据余弦函数法求解。设P点在xy平面的投影为F,如图7-5所示。

图7-3 坐标系转动方向
a)三维立体视图 b)z轴俯视图
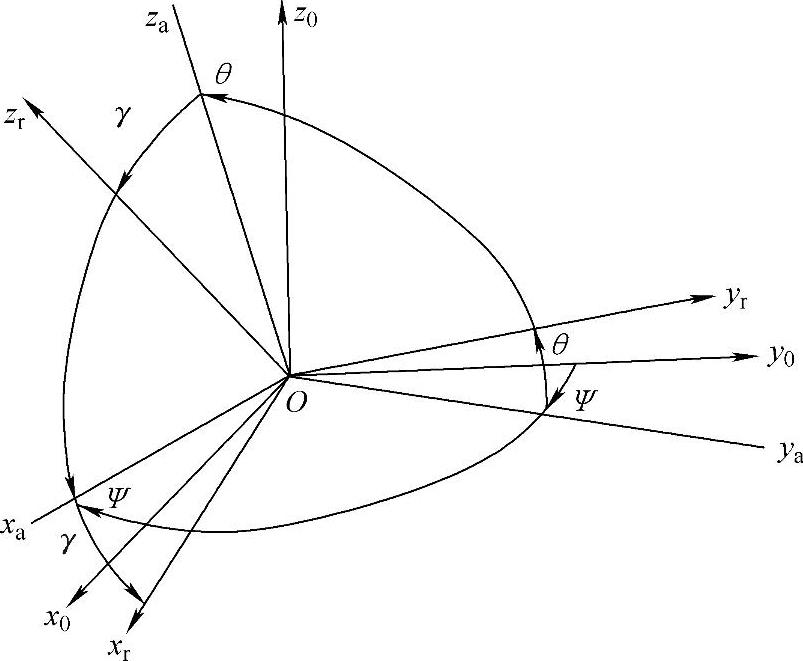
图7-4 坐标转换示意图

图7-5 P点在xy平面的投影
设测量点位置为F,在原始坐标系下为(x0,y0),x0=OH=BF,y0=OB=HF,将坐标系以原点为轴向右转ψ角度,F点在新坐标系下为(xa,ya),xa=OD=GF,ya=OG=DF,过点B和H向两坐标轴分别作垂线。当右转为正时,新坐标系下观测位置与原始位置关系为
OD=OE-DE=OHcosψ-HFsinψ (7-1)
OG=OA+AG=OBcosψ+BFsinψ (7-2)
所以有
xa=x0cosψ-y0sinψ (7-3)
ya=x0sinψ+y0cosψ (7-4)
三维坐标系下将方程用矩阵形式表达为

式中,Cψ为转换矩阵,利用其左乘坐标矢量就得到旋转坐标系下的位置。
按这样的转换方法,规定不改变转动先后次序,将向右旋转(如第一次旋转方向,从z轴反向看xy平面,顺时针旋转)设为正,则可得从x0y0z0到xryrzr坐标系的转换矩阵Cbn为

Cbn为依次左乘转换矩阵,即

式中,Cθ为旋转xa轴的转换矩阵;Cγ为旋转yr轴的转换矩阵。
Cbn必须为正交矩阵,即
CbnCnb=Cbn(Cbn)T=I (7-8)
如果已知某一时刻的姿态矩阵,可以直接通过式(7-9)进行转换:
Xn=CnbXb (7-9)(https://www.xing528.com)
式中,X为三维矢量;Xn为在n系下的测量值;Xb为在b系下的测量值。
如此,就得到了在三维坐标系下,将b系测量值转换到n系中的计算方法。
姿态矩阵具有正交性质。设直角坐标系Oxiyizi的单位矢量为i1,i2,i3,则三者应互相垂直,且模为1;另一直角坐标系Oxyz的单位矢量为e1,e2,e3,同样三者互相垂直,模为1。通过矩阵C将坐标系Oxiyizi转换到坐标系Oxyz,即

将式(7-10)中的矩阵换算为方程组,即
e1=C11i1+C12i2+C13i3 (7-11)
e2=C21i1+C22i2+C23i3 (7-12)
e3=C31i1+C32i2+C33i3 (7-13)
因为e1,e2,e3为互相垂直的单位矢量,所以可得
e1×e2=e3 (7-14)
e2×e3=e1 (7-15)
e3×e1=e2 (7-16)
将式(7-11)~式(7-13)代入式(7-14)~式(7-16)可得

对矢量进行运算。因为单位矢量对应系数相等,可得
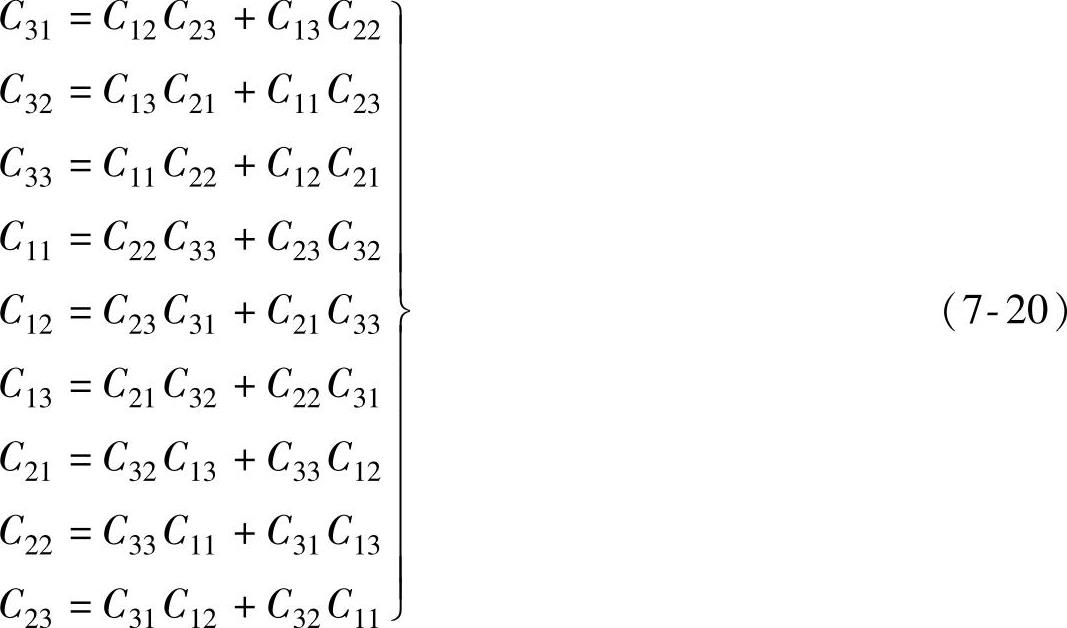
方程组式(7-20)说明,矩阵C的任一矩阵元素都等于其代数余子式。同理,对于矢量e1,e2,e3应有
e1·e1=e2·e2=e3·e3=1,e1·e2=e2·e3=e3·e1=0 (7-21)
将式(7-11)~式(7-13)代入式(7-21)可得
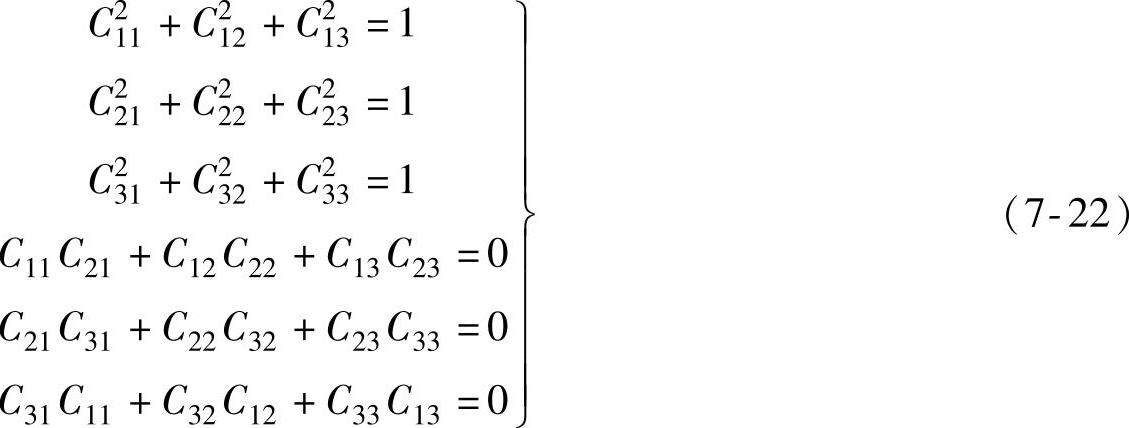
由方程组式(7-20)和方程组式(7-22)可得C的行列式为1,并可得

式中,M11,M12,M13为C11,C12,C13的代数余子式,同时可得
detC=C211+C212+C213=1 (7-24)
根据矩阵求逆公式,有

式中,C∗为C的伴随矩阵。
根据式(7-23)和式(7-24)得

式中,CT为C的转置矩阵,因此姿态矩阵C为正交矩阵。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。