



1.惯性技术
所谓惯性技术,是惯导技术、惯性仪表技术和惯性测量技术的通称,是多学科的综合技术,是涉及精密机械、计算机、自动控制、微电子、数学、材料、光学等多种学科、多种技术的交叉学科。
惯导是惯性导航的简称;惯性仪表包括各类陀螺仪和加速度计;惯性测量技术就是采集陀螺仪、加速度计等仪表的数据,使用合适的惯导算法,进行各种工程应用的技术。
依托管道内检测平台的管道测绘就是典型的惯性测量技术。其目标是实现管道位置内检测器的长航时正常工作,可以进一步提升管道安全检测评估的智能性、可靠性、有效性,同时实现管道铺设轨迹测量、管线地理坐标测量、管道位移变化、线应变测量以及管道内缺陷的精确地理定位,还可以为管道内检测器运行控制提供运行姿态、速度信息。
2.捷联惯性导航系统简介
管道测绘的核心工作是对搭载在管道内检测平台(即清管器)上的惯性仪表数据进行离线处理,完成航迹推算,获得管道的地理信息,导航技术是基础。此外,校验点修正技术也必不可少。清管器必然经过管道的起点、终点和其他的已知点、特征点,这些已知坐标点统称为校验点。
目前国内外通常的做法是利用捷联惯性导航系统结合里程轮的连续信息和校验点的修正信息,实现管道地理坐标测量。
所谓捷联惯性导航系统是相对于平台惯性导航系统而言的。
平台惯性导航系统是将陀螺仪和加速度计安装在一个稳定平台上,以平台坐标系为基准,测量运载体运动参数的。平台系统采用常平架平台,在平台上安装惯性敏感元件。平台可以隔离载体运动对敏感元件的影响,并且框架轴上的角度传感器直接输出姿态角,然后进行导航推算。平台惯性导航系统已经达到了很高的水平,但是其造价、维修费用十分昂贵,而且其采用了框架伺服系统,相对可靠性将会下降。(https://www.xing528.com)
捷联惯性导航系统是将惯性敏感元件(陀螺仪和加速度计)直接安装在运载体上,是一种不再需要稳定平台或常平架系统的惯性导航系统。捷联惯性导航系统采用的是数学姿态转换平台,将惯性敏感元件直接安装到载体上,敏感元件的输出信息直接输送到导航计算机中进行实时的姿态矩阵解算,通过姿态矩阵将惯性导航系统中加速度计测量到的信息转换到导航用的导航参考坐标系中,进行导航积分运算以及提取姿态角信息。典型捷联惯性导航系统解算位置信息的过程如图7-1所示。
对平台惯性导航系统和捷联惯性导航系统的工作原理进行对比,有如下结论:捷联惯性导航系统的敏感元件便于安装、维修和更换;捷联惯性导航系统的敏感元件可以直接给出所有导航参数;捷联惯性导航系统的敏感元件易于重复布置,这对提高性能和可靠性十分有利;捷联惯性导航系统体积小,而且去掉了常平架平台,消除了平台稳定过程的各种误差;捷联惯性导航系统将敏感元件直接固定在载体上,导致惯性敏感元件工作环境恶化,降低了系统的精度。考虑到管道内检测工程的应用特点,显然选择捷联惯性导航系统更加务实和有效。
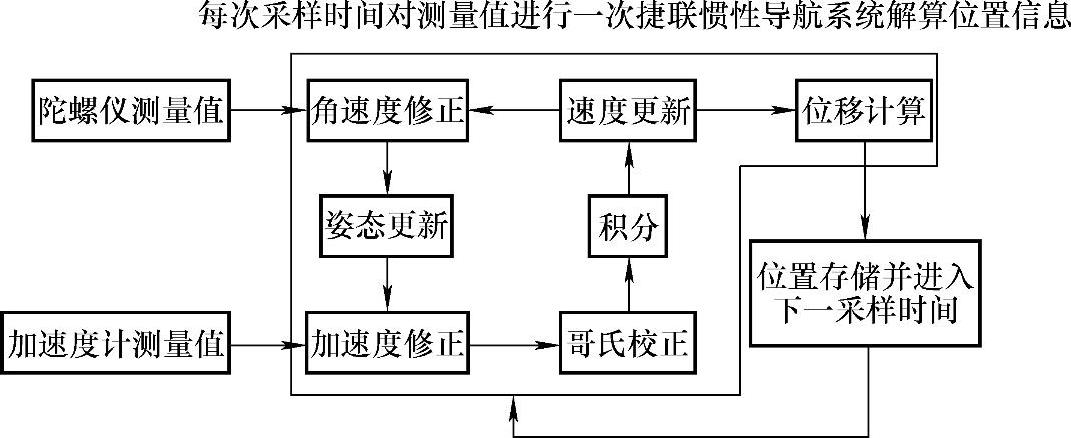
图7-1 典型捷联惯性导航系统解算位置信息的过程
3.捷联惯性导航系统和里程轮结合点坐标修正的组合导航系统
总的来说,捷联惯性导航系统在短时间内可以提供极高的精度,也可用于估算角度误差、位置误差和敏感元件误差。由于捷联惯性导航系统解算的导航参数误差随时间迅速累积(特别是位置误差),即“微观精度高,宏观精度低”,导致系统无法长时间正常工作。
解决问题的基本方法是采用基于滤波器的组合导航方法,如SINS、GPS和里程轮等。而运行在封闭的地埋管道或海底管道内的管道地理坐标内检测装置无法随时直接获取准确的基准点地理坐标信息,无法像飞行器、陆地车辆和海上航行器利用GPS信号实时或定时对导航误差进行修正。因此管道测绘的组合导航系统通常是SINS/Od,每测一段还需引入较高精度的点坐标信息做修正。结合国内外资料,结合点坐标校验的SINS/Od组合导航系统是国外主流管道惯性内检测工程的解决方案。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。