



以沈阳工业大学研制的ϕ1219mm型单节内检测器为研究对象,结合6.5节中T-S模糊模型确定PI速度控制的方法进行速度调节,并利用Matlab软件进行仿真。输气管道运行参数为:m=5000kg,l=108m,(mg+Fμ)μ=50000N,g=9.81m/s2,管道气压差为0.3MPa。内检测器前、后两端气体的密度作为状态方程的参数需要由密度计实时测量出来,并传递给速度控制器。在仿真系统中无法测得密度值的实时改变,因而将内检测器前、后端气体密度分别设定为1.1691kg/m3和3.5073kg/m3。内检测器静止于管道中,在气压差的作用下做急加速运动。
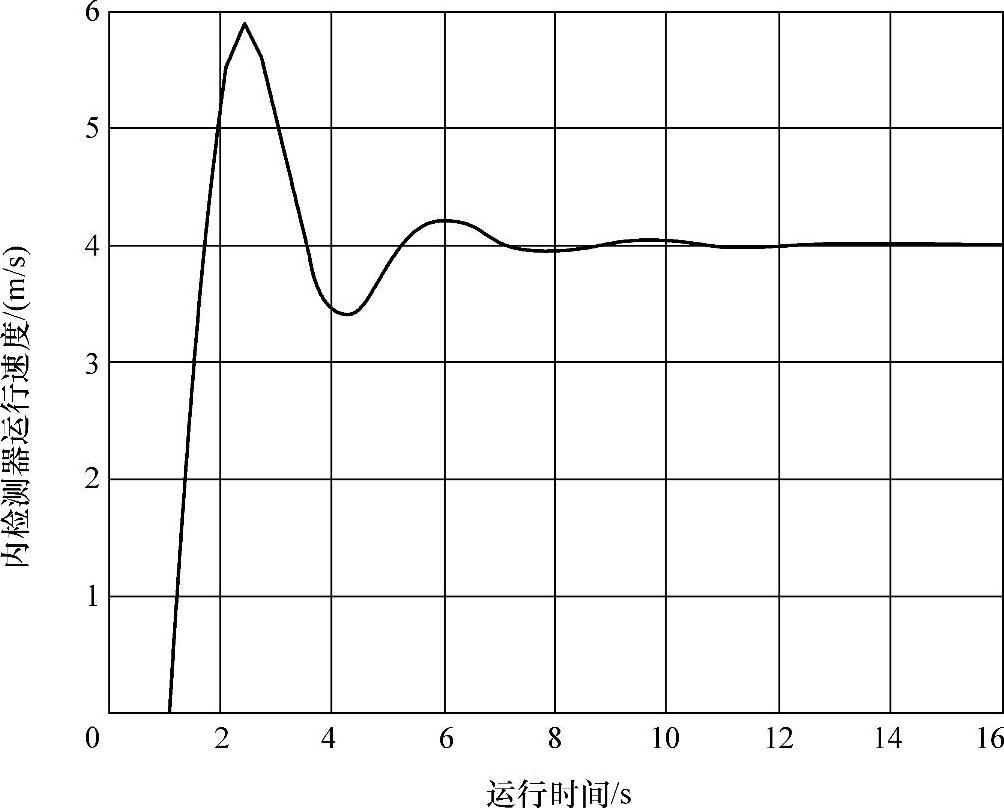
如图6-11所示,初始状态为内检测器受到前、后压力差与摩擦阻力的综合作用,静止于管道之中。当内检测器前、后压力差达到并超过50000N时,内检测器加速运行。此时时间节点为1.2s。加速度计测得加速度值大于7.5m/s2,打开泄流阀。从速度上升曲线中可以看出,上升曲线呈递增凸函数状,说明加速度在减小,速度依然在增加。当时间节点为2s时,加速度值小于1m/s2,加速度调节结束。此时速度为5.5m/s,速度调节依旧发挥作用。当时间节点为2.3s时,内检测器速度达到最大值,为5.9m/s。随后速度值得以回落。当时间节点为3.6s时,加速度值为-1.5m/s2,速度到达4m/s。当时间节点为4.2s时,速度到达3.4m/s,此刻加速度为0m/s2。随后,速度在4m/s上下振荡,并趋于平稳。图6-11中时间节点为4.2s之前内检测器处于急加速状态,系统采用加速度值与速度值作为速度控制的输入参数对内检测器的速度进行控制。图6-11中运行时间为4.2s之后,即内检测器在管道中呈现为缓加速运动状态。当速度值逐步提高到内检测器运行速度上限时,系统将速度值作为速度控制的输入参数。从图6-11中的运行速度值曲线可以看出,利用速度控制器可有效地将内检测器的运行速度控制在适于检测的范围之内。
 (https://www.xing528.com)
(https://www.xing528.com)
图6-11 管道内检测器启动速度控制
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。