



内检测器处于水平管道中时,重力完全成为对管道的压力,如图6-3所示。由滑动摩擦力公式可以推导出由于重力所引起的阻力。
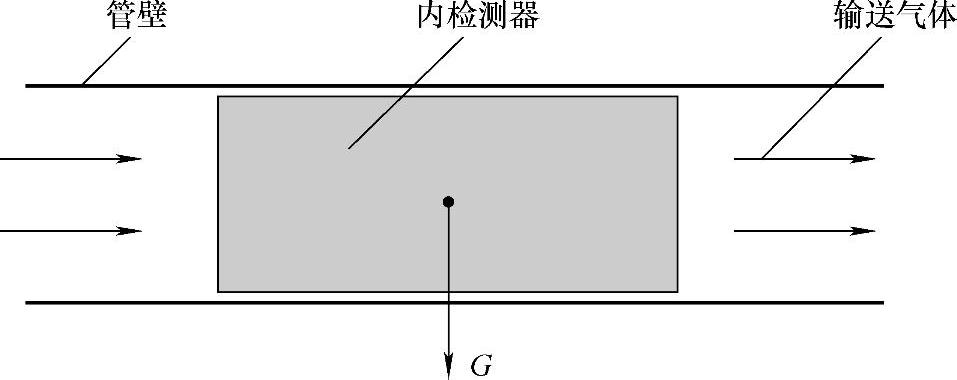
图6-3 水平管道中的内检测器
由于内检测器是在前后端压力差的作用下运行的,运用动力学理论即牛顿第二定理,得到描述内检测器在水平管道流场中行走的动力学方程为
ma(t)=FP-(mg+Fμ)μ-FW (6-1)
式中,m为内检测器质量;a(t)为内检测器水平加速度;FP为内检测器两端的压力差;g为重力加速度;Fμ为永磁体对管壁的吸附力;μ为磁阻系数;FW为内检测器上的皮碗等元件与管壁产生的摩擦阻力。
FW可分为静摩擦阻力和动摩擦阻力两种,与式(6-1)的其他项相比较,无论是哪一种,其数值都很小,可以忽略不计。因此式(6-1)可改写为
ma(t)=FP-(mg+Fμ)μ (6-2)
式中,内检测器两端的压力差FP包含静压力差与动压力差,即
FP=FS+FD (6-3)
式中,FS为静压力差,表达式为
FS=ρ1gV1-ρ2gV2( 6-4)
式中,ρ1为内检测器上游的气体密度;V1为上游的气体体积;ρ2为内检测器下游的气体密度;V2为下游的气体体积。
气体密度可通过内检测器两端的密度计测出,上游的气体体积可通过管道横截面面积与长度乘积得到,即
FS=ρ1gSl-ρ2gS(L-l) (6-5)
式中,S为管道横截面面积;L为管道总长;l为内检测器途径路径的长度。(https://www.xing528.com)
式(6-3)中,FD为动压力差,表达式为

式中,ρ1为内检测器上游的气体密度;v为上游的气体流速,其数值可通过气体体积与管道横截面积之商求出,即

式中,R为管道内半径;r(t)为内检测器的泄流孔半径。
综合式(6-2)、式(6-5)及式(6-7)可得

经过整理,可得

由式(6-9)可知,内检测器泄流孔半径与加速度值之间为单调递减函数,由此可知泄流孔半径越大,内检测器的加速度值越小。
式(6-9)中的参数由以下方法确定:m为内检测器质量,可以通过称重设备测量得到;R为管道内半径,S为管道横截面积,L为管道总长,可以根据管道的建设标准来确定;ρ1和ρ2为内检测器上、下游的气体密度,可根据安装在内检测器前后两端的密度计测得;(mg+Fμ)μ为由重力以及永磁体对管道壁的吸附力形成的阻力数值,可利用绞盘牵引内检测器的方法获得;l为内检测器途径路径的长度,可利用算法与加速度计输出联合求出。
倾角器实时记录内检测器前进方向与重力方向的夹角。在水平管道中,倾角器数值为90°。如果将倾角作为速度控制的输入参数,则式(6-9)可修改为

式中,θ为检测器前进方向与重力方向的夹角,且θ=90°。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。