



焊机变位机械也称焊接操作机,是将焊接机头准确地送达并保持在待焊位置,或是以选定的焊接速度沿规定的轨迹移动焊接机头,配合完成焊接操作的焊接机头变位机械。按其结构形式及应用特点分为:
1.平台式焊接操作机
这类焊接操作机主要由操作平台2、立架3、台车6等组成,如图8-24所示。焊接机头或埋弧焊小车1置于平台上,并可在平台上移动;平台安装在立架上,能在升降机构的驱动下沿立架导向机构升降;而立架又座落在台车上,可沿轨道水平行走。它的主要特点是操作者可在操作平台上直接监控焊接过程。目前,主要用于大直径筒体外环缝或外纵缝的焊接。为改善平台升降性能,可增设配重4,为改善台车整体运行的稳定性,可在台车上适当安放配重铁5;为保证平台升降范围的可靠性,可考虑通过控制系统的限位开关来实现。
2.横臂式焊接操作机
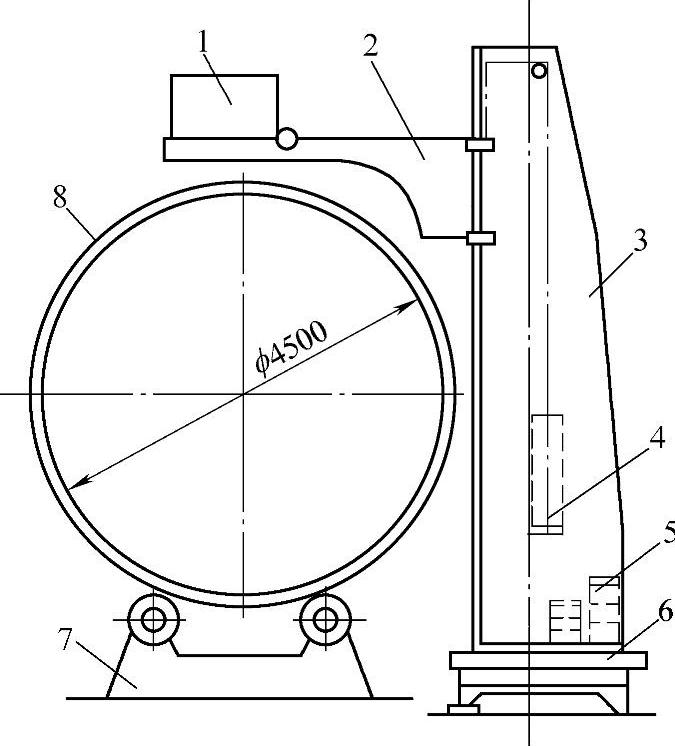
图8-24 平台式焊接操作机
1—焊机或机头 2—操作平台 3—立架 4—平台配重 5—配重铁 6—台车 7—滚轮架 8—工件
这类焊接操作机根据横梁的结构不同又分为:
(1)悬臂式焊接操作机 悬臂式焊接操作机主要由悬臂、悬臂升降机构、立柱、底座以及悬臂上的机头移行机构等组成。其中水平悬臂固定安装在升降滑座上,可沿立柱升降或绕立柱轴转动;机头可沿悬臂导轨水平移动,以适应不同的焊接位置;支柱安装在底座上,底座常为固定的,该操作机比较适合固定位置的焊接。
另一种细长固定悬臂式焊接操作机,其机头固定在悬臂的端部,通过三维调整机构实现焊枪的对中。该操作机将立柱固定在台车上,使其可沿导轨移动焊接。
这类操作机主要用于筒体内、外环缝的焊接,也可用于筒节外纵缝的焊接。目前,这种固定悬臂式操作机有被伸缩臂式操作机取代的趋势,生产和应用都日趋减少。
(2)伸缩臂式焊接操作机 这类焊接操作机的特点主要是横臂外伸长度是连续可调的,具体形式是多种多样 的。操作机的一个示例如图8-25所示。其主要构成有台车1、立柱4、伸缩臂3、操作盘5、调整机构6及焊接机头8等组成。(https://www.xing528.com)

图8-25 伸缩臂式焊接操作机
1—台车 2—焊接电源 3—伸缩臂 4—立柱 5—操作盘及手孔盒 6—调整机构 7—焊剂斗 8—机头
焊接电源2随台车1一起移动;伸缩臂通过滑座在立柱上可前后滑动和上下升降,立柱安装在台车的转盘上;因为伸缩臂可沿滑座导轨作水平进退,滑座又能沿立柱升降,整个机构可随台车控制行走,因而焊接机头具有三个独立的自由度,操作比较灵活。另外,其焊接机头的调整机构适应性很强,它能够为操作者提供焊枪对中、角度调整、焊枪高度调整等细节调节的需求,在机电一体化控制系统中,该调整机构还可由自动控制来完成三维自动跟踪。这种操作机作业范围大,有效焊接范围为:5m×5m×L(高×宽×轨道长度/m)。通过与各种焊件变位机械配合使用,可进行筒体类工件内外环缝、内外纵缝、螺旋焊缝的焊接,以及工件内外表面的堆焊等工程作业,是目前国内外应用最广泛的焊接操作机。
伸缩臂式操作机除了用于焊接操作外,若对伸缩臂另一端进行相应的改装,还可实现一机多用,如进行工件表面的打磨、工件的边缘切割、甚至用于喷涂、喷漆和焊缝检测操作等。
另外,伸缩臂式操作机的进一步完善和发展,就成了直角坐标式工业机器人。但后者较前者应具有更高的运动精度和自动化程度。有时为了扩大焊接机器人的作业空间,还可将焊接机器人安装在操作机伸缩臂的前端,用来焊接大型结构。
(3)折臂式焊接操作机 这类操作机的主体与悬臂式操作机类似,只是模仿人的手臂将悬臂做成两节,彼此铰接,整个悬臂也同立柱铰接,并可沿立柱升降。这种操作机主要用于工件端面的焊接,适用范围不大,使用较少。
(4)门架式焊接操作机 这种操作机有两种结构形式:其一是焊接机头(或焊接小车)安装在沿门架立柱可升降(Z向)的平台上,并能沿工作平台上的轨道(或导向机构)作横向(Y向)移动,而整个门架又可在行走台车的拖动下沿纵向(X向)轨道行走,从而实现焊接机头的三维移动;另一种是将焊接机头安装在一套独立的升降机构上,该升降机构安装在小车上,小车可沿门架上横梁的轨道移行。
这两种门架式操作机,一般都设计成横跨焊接车间的工作方式,沿车间的纵向轨道移动。其主要特点是,该操作机的工作覆盖面很大,主要用于板材的大面积拼接和一般高度的大面积金属结构组件以及筒体外环缝的焊接等。门架式操作机结构庞大,典型的应用是造船厂和大型金属结构厂。根据产品的设计,门架式操作机若不需要较高的支撑时,可将其改造成类似于桥式起重机式的桥式操作机,以免与车间内的天车构成阻碍。
综上所述,所有现代的焊接操作机都必须满足三维空间的可控运动,以适应焊接结构产品的多样化及焊接方法的多样性。与计算机技术及自动控制方式的结合,各种新型的焊接操作机将会在未来的焊接生产中发挥巨大的作用。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。