



针对11.5节的实战练习,本节将给出操作步骤,顺次进行解答。如果读者无法独立完成11.5节要求的这些操作,那么就一步一步跟随讲解,操作一遍吧!
解答1、产品展示动画模拟
 打开本书提供的素材文件“自定心卡盘.SLDASM”,单击“装配”工具栏中的“爆炸视图”按钮
打开本书提供的素材文件“自定心卡盘.SLDASM”,单击“装配”工具栏中的“爆炸视图”按钮 ,通过数次选择移动的方式创建自定心卡盘的爆炸视图,如图11-41所示。创建的过程中,注意令零件尽量不要穿越,并尽量直线移动。
,通过数次选择移动的方式创建自定心卡盘的爆炸视图,如图11-41所示。创建的过程中,注意令零件尽量不要穿越,并尽量直线移动。
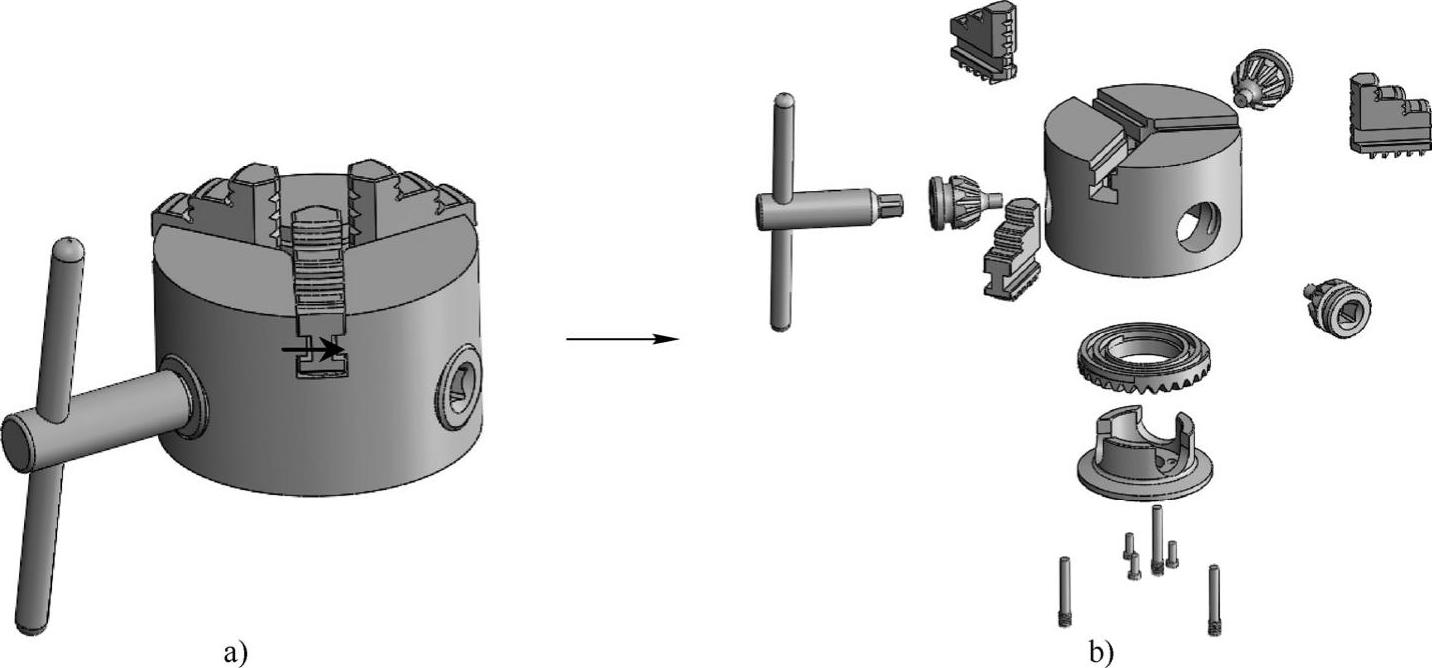
图11-41 打开素材并创建爆炸视图操作
 完成爆炸视图的创建后,单击底部“运动算例”标签切换到运动算例操作空间。在“运动算例”操控面板中单击“动画向导”按钮
完成爆炸视图的创建后,单击底部“运动算例”标签切换到运动算例操作空间。在“运动算例”操控面板中单击“动画向导”按钮 ,然后顺次创建两段长度都为13s的爆炸动画和装配动画,如图11-42所示。
,然后顺次创建两段长度都为13s的爆炸动画和装配动画,如图11-42所示。
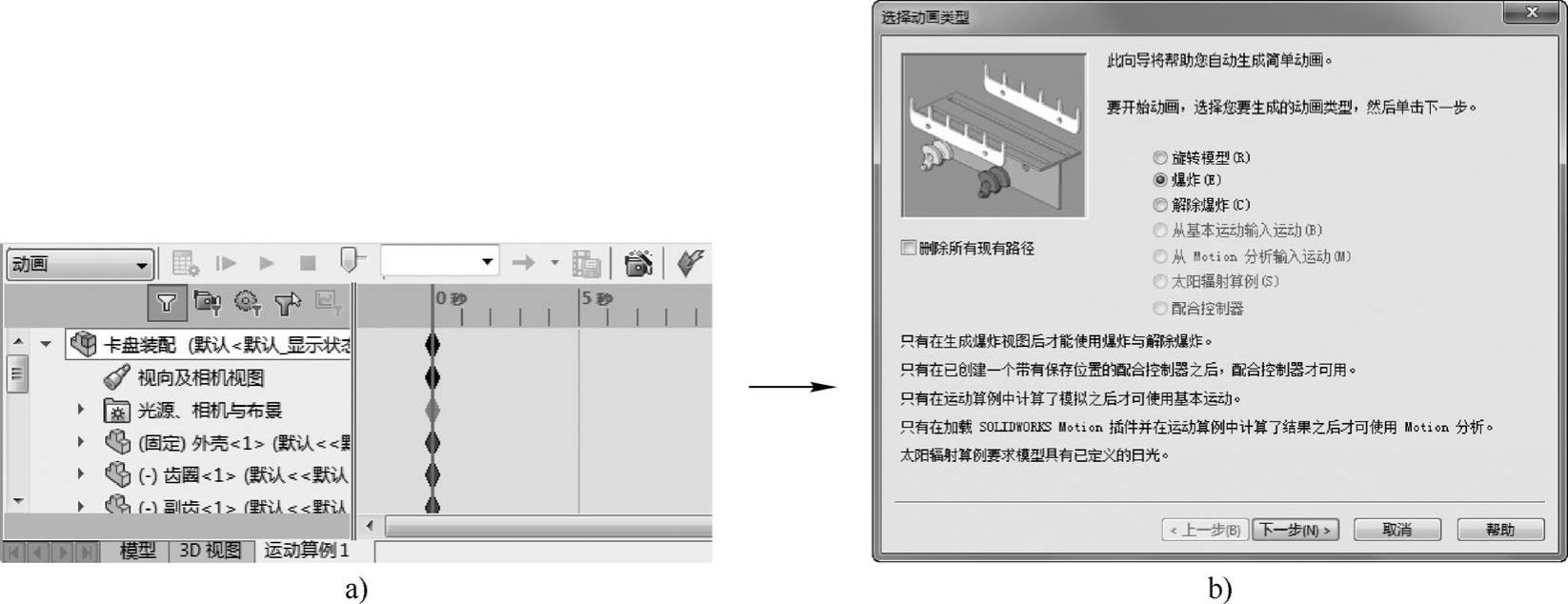
图11-42 创建爆炸动画操作
 继续单击“运动算例”操控面板中的“动画向导”按钮
继续单击“运动算例”操控面板中的“动画向导”按钮 ,打开“选择动画类型”对话框,选中“旋转模型”单选按钮,然后顺次操作(起始帧设置为“23秒”),创建旋转动画,如图11-43所示。
,打开“选择动画类型”对话框,选中“旋转模型”单选按钮,然后顺次操作(起始帧设置为“23秒”),创建旋转动画,如图11-43所示。
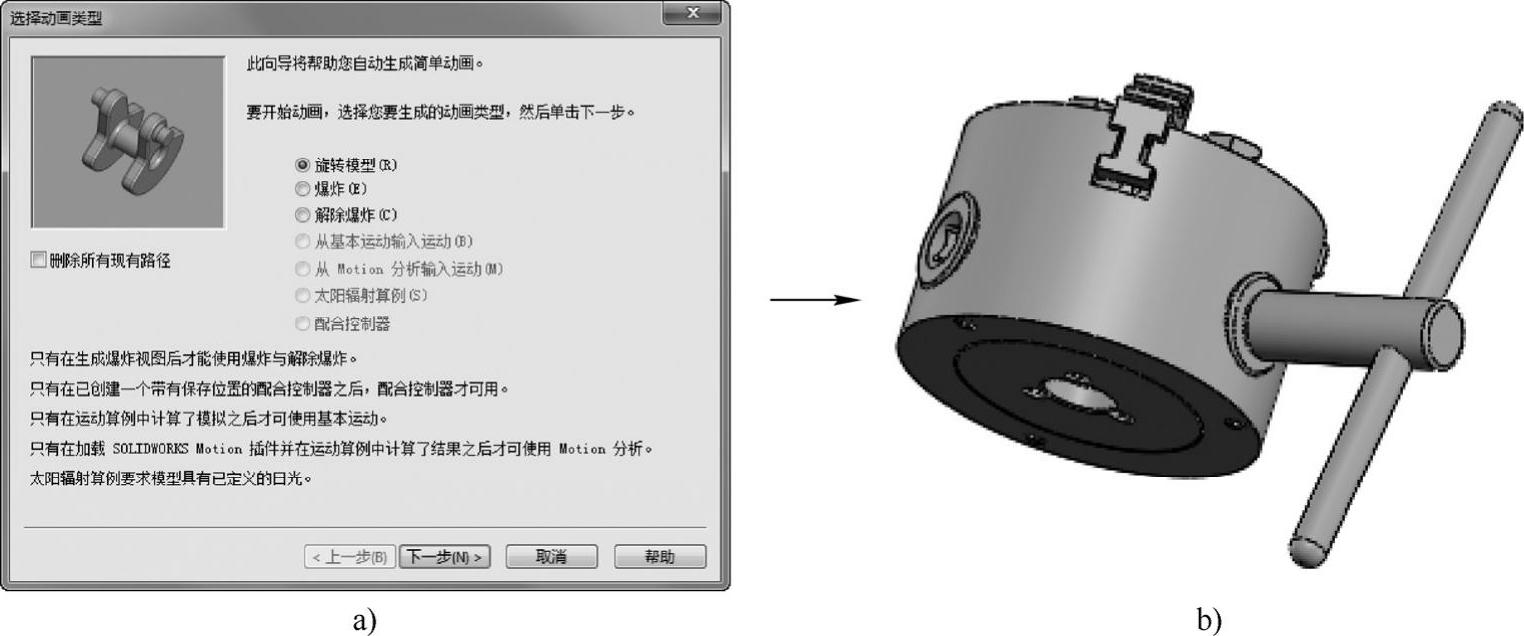
图11-43 创建旋转动画操作
解答2、挖掘机动画模拟
 打开本书提供的素材文件“挖掘机.SLDASM”,并单击底部的“运动算例1”标签打开“运动算例”操控面板。
打开本书提供的素材文件“挖掘机.SLDASM”,并单击底部的“运动算例1”标签打开“运动算例”操控面板。
 单击操控面板工具栏中的“马达”按钮
单击操控面板工具栏中的“马达”按钮 ,选择挖掘机操作台底部的圆柱面作为马达放置位置,选择“底座装配”为马达要相对移动的零部件,如图11-44a和图11-44b所示。然后在“运动”卷展栏的下拉列表中选择“线段”选项,在打开的“函数编辑程序”对话框中,输入如图11-44c所示数据,添加一旋转马达。
,选择挖掘机操作台底部的圆柱面作为马达放置位置,选择“底座装配”为马达要相对移动的零部件,如图11-44a和图11-44b所示。然后在“运动”卷展栏的下拉列表中选择“线段”选项,在打开的“函数编辑程序”对话框中,输入如图11-44c所示数据,添加一旋转马达。
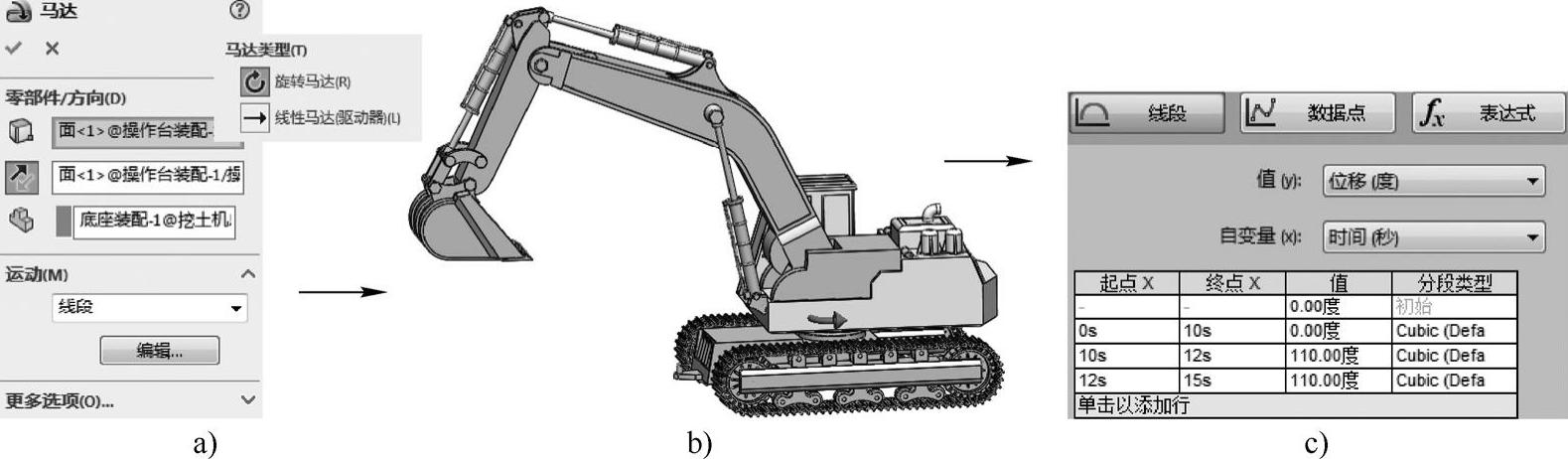
图11-44 添加旋转马达并定义马达线段操作
 同
同 的操作,单击“马达”按钮
的操作,单击“马达”按钮 ,选择支撑动臂的一个“活塞”,选择要相对移动的零部件下部的“活塞缸”,然后输入“线段”运动类型的相关数据,如图11-45所示,添加一线性马达。
,选择支撑动臂的一个“活塞”,选择要相对移动的零部件下部的“活塞缸”,然后输入“线段”运动类型的相关数据,如图11-45所示,添加一线性马达。
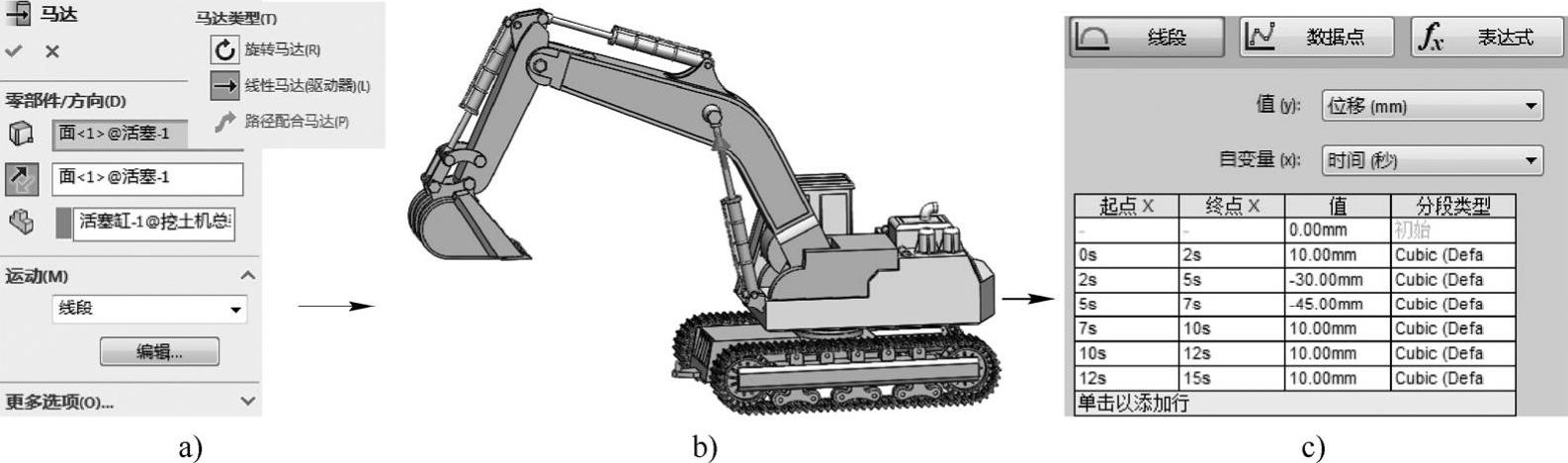
图11-45 添加第一个线性马达并设置马达线段操作
 同
同 的操作,添加动臂上部“活塞”的线性马达,如图11-46a所示,并按照图11-46c所示设置马达的线段参数,添加第二个线性马达。
的操作,添加动臂上部“活塞”的线性马达,如图11-46a所示,并按照图11-46c所示设置马达的线段参数,添加第二个线性马达。
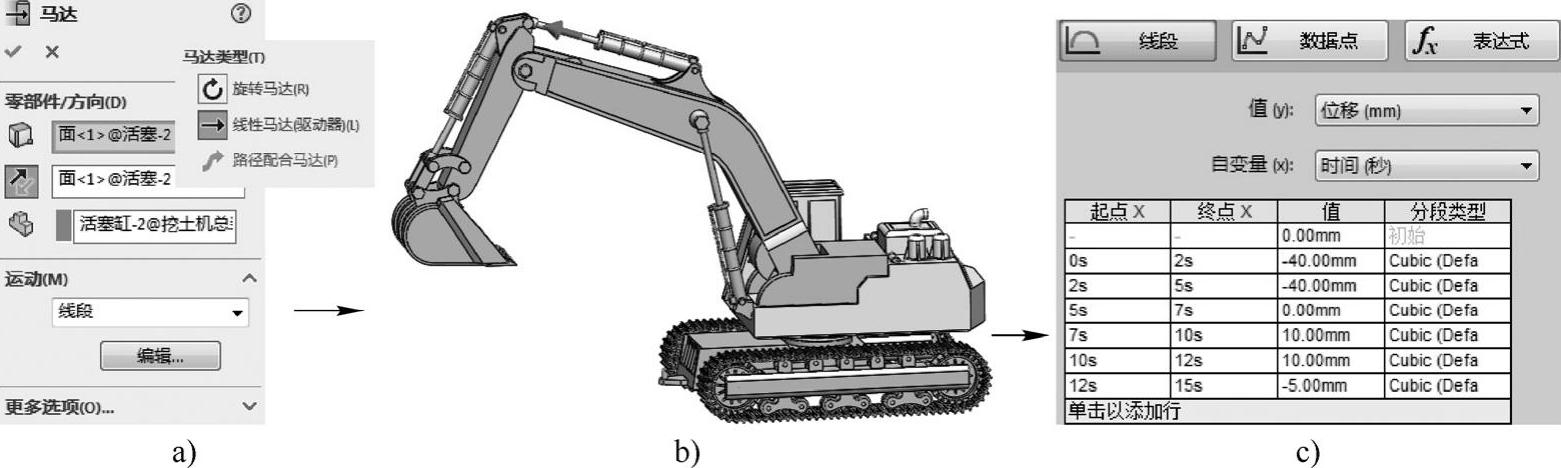
图11-46 添加第二个线性马达并设置马达线段操作
 同
同 的操作,添加驱动挖斗“活塞”的线性马达,要相对移动的零部件同样选择与其相连的“活塞缸”,如图11-47a所示,按照图11-47c所示设置马达的线段参数,添加第三个线性马达。完成全部操作,单击“播放”按钮,可观看动画效果。
的操作,添加驱动挖斗“活塞”的线性马达,要相对移动的零部件同样选择与其相连的“活塞缸”,如图11-47a所示,按照图11-47c所示设置马达的线段参数,添加第三个线性马达。完成全部操作,单击“播放”按钮,可观看动画效果。
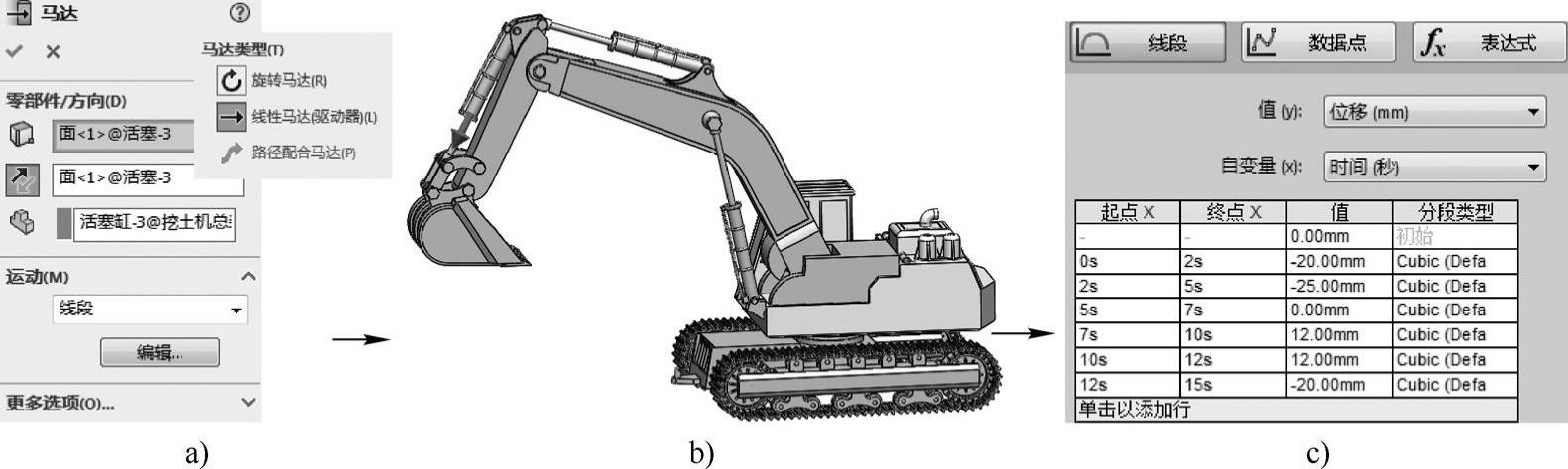
图11-47 添加第三个线性马达并设置马达线段操作(https://www.xing528.com)
解答3、滑轮吊物动画模拟
 新建装配文件,然后导入本书提供的多个素材文件,并进行基本的装配,效果如图11-48中的装配体模型所示。
新建装配文件,然后导入本书提供的多个素材文件,并进行基本的装配,效果如图11-48中的装配体模型所示。
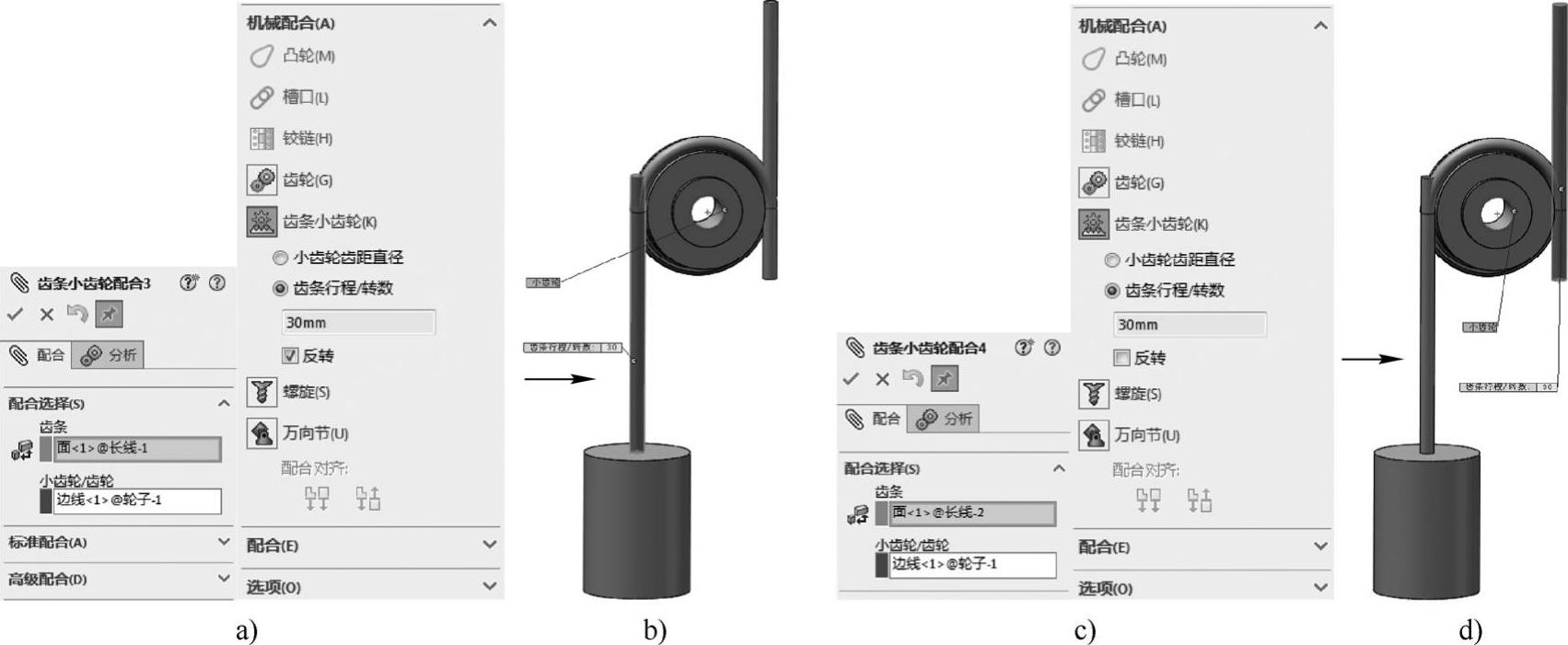
图11-48 添加两个“齿条小齿轮配合”配合关系
 添加轮子和长线间的两个“齿条小齿轮配合”配合关系,如图11-48所示,设置每个的“转数”大小都为30mm,只是方向相反。
添加轮子和长线间的两个“齿条小齿轮配合”配合关系,如图11-48所示,设置每个的“转数”大小都为30mm,只是方向相反。
 在装配环境下,捕捉绳子的下端面,执行完全贯穿的“拉伸切除”命令操作,如图11-49所示(设置只对长线对象执行拉伸切除操作)。
在装配环境下,捕捉绳子的下端面,执行完全贯穿的“拉伸切除”命令操作,如图11-49所示(设置只对长线对象执行拉伸切除操作)。
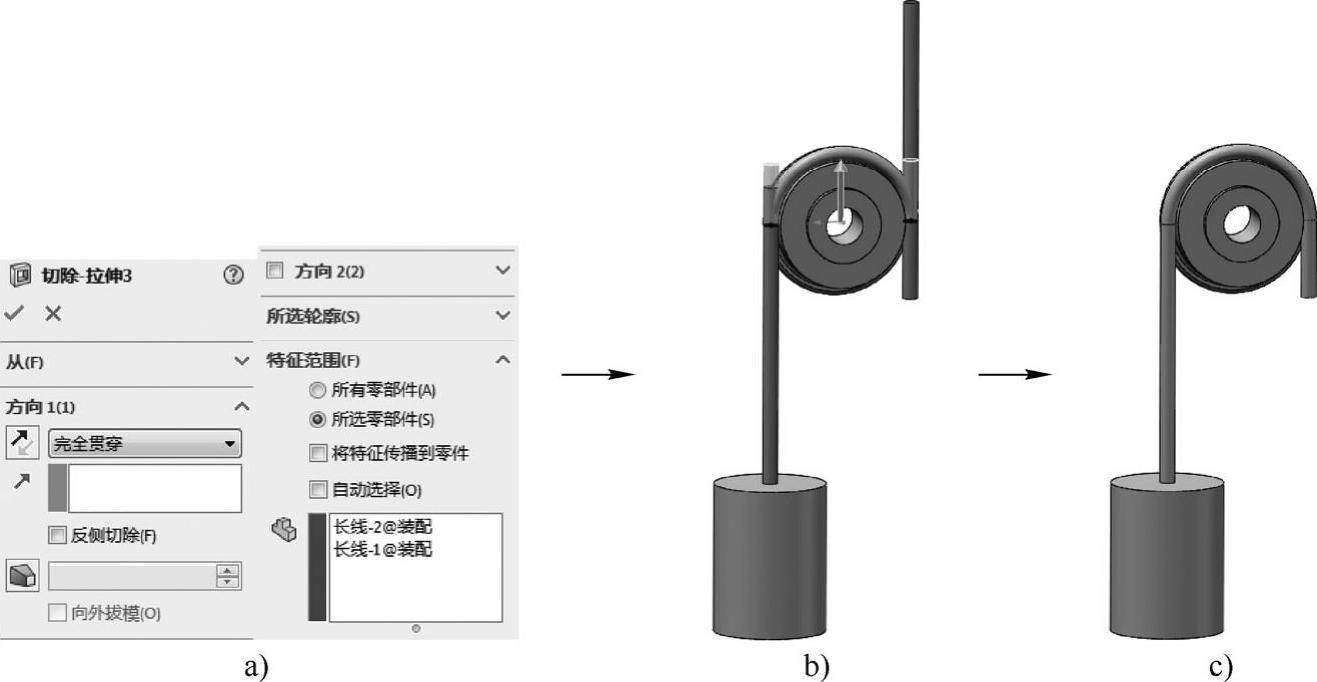
图11-49 创建“拉伸切除”特征
 切换到“运动算例”操控面板,将当前帧置于“4秒”位置处,然后直接拖动右侧的长线,如图11-50所示,即可生成动画,单击“播放”按钮可观看动画效果。
切换到“运动算例”操控面板,将当前帧置于“4秒”位置处,然后直接拖动右侧的长线,如图11-50所示,即可生成动画,单击“播放”按钮可观看动画效果。
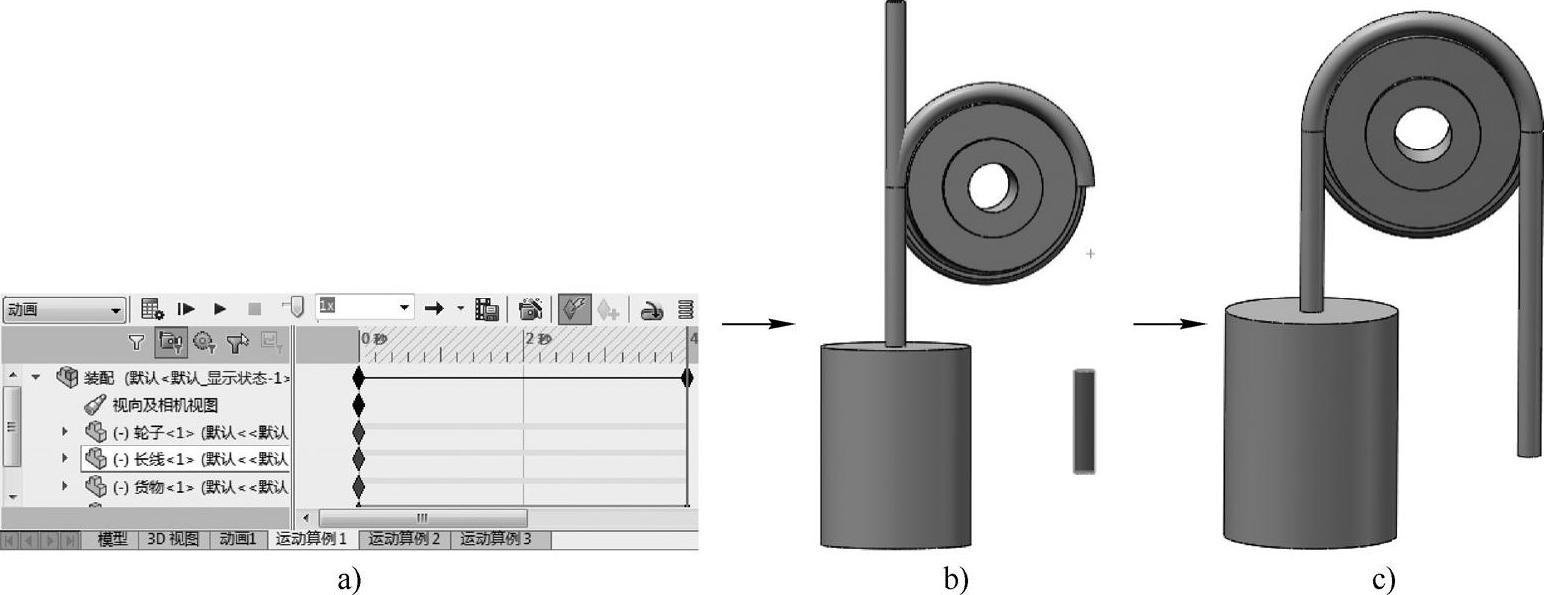
图11-50 创建动画
解答4、仿真弹簧动画模拟
 新建装配文件,导入本书提供的素材文件“挡板.SLDPRT”(两次),并进行装配,效果如图11-51所示。
新建装配文件,导入本书提供的素材文件“挡板.SLDPRT”(两次),并进行装配,效果如图11-51所示。
 在装配环境下,直接单击“装配”工具栏中的“新零件”按钮,创建与两个挡板相关联的草图,再使用“扫描”特征,创建出弹簧零件,如图11-52所示(弹簧截面的直径为7mm)。
在装配环境下,直接单击“装配”工具栏中的“新零件”按钮,创建与两个挡板相关联的草图,再使用“扫描”特征,创建出弹簧零件,如图11-52所示(弹簧截面的直径为7mm)。

图11-51 导入素材文件
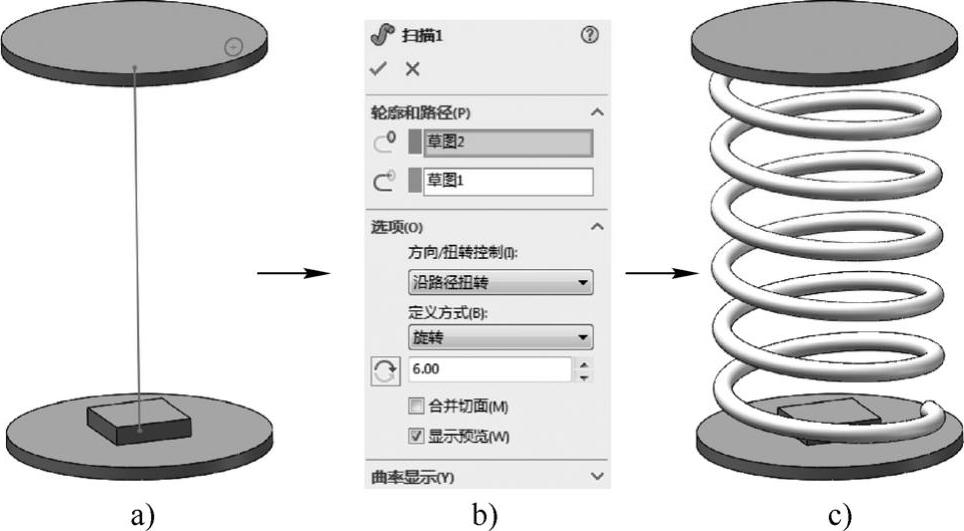
图11-52 创建弹簧文件
 添加两个挡板间的“距离”配合约束,所添加的距离为“150mm”,如图11-53所示。
添加两个挡板间的“距离”配合约束,所添加的距离为“150mm”,如图11-53所示。
 切换到“运动算例”操控面板,将当前帧移动到“5秒”处,编辑上面添加的“距离”配合约束,大小设置为“80mm”,系统将生成动画,完成操作,如图11-54所示。然后单击“播放”按钮,即可观看弹簧压缩的动画效果。
切换到“运动算例”操控面板,将当前帧移动到“5秒”处,编辑上面添加的“距离”配合约束,大小设置为“80mm”,系统将生成动画,完成操作,如图11-54所示。然后单击“播放”按钮,即可观看弹簧压缩的动画效果。
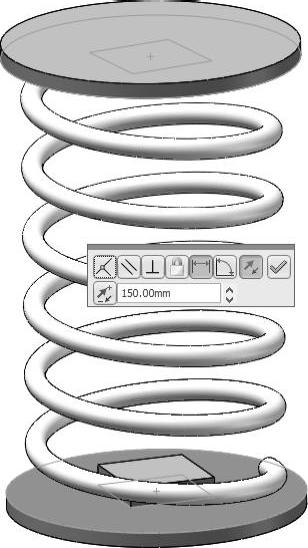
图11-53 定义挡板间的距离
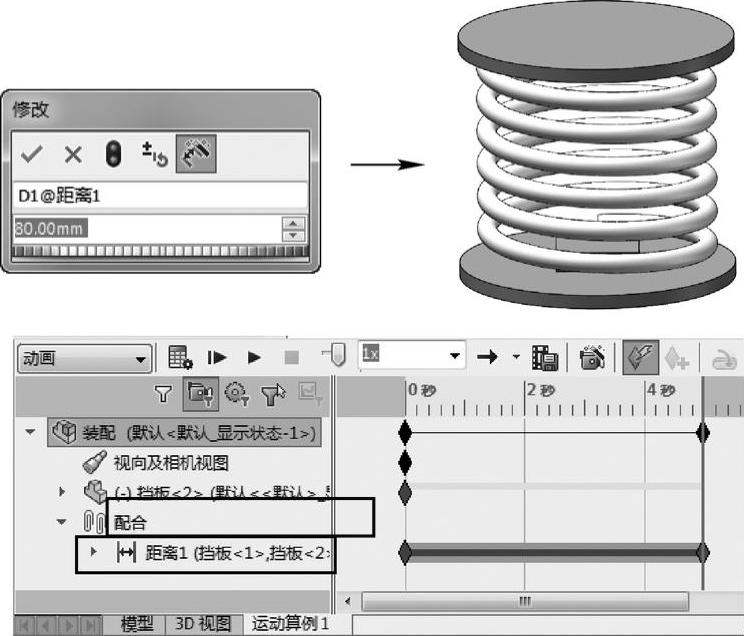
图11-54 通过修改距离配合约束生成动画
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。