



1.步进电动机的原理
步进电动机是一种将电脉冲信号转换成机械角位移的驱动元件。给一个电脉冲信号,步进电动机就回转一个固定的角度,称为一步,所以称为步进电动机。由于它输入的是脉冲电流,因此也称为脉冲电动机。
步进电动机具有精度高、惯性小的特点,对各种干扰因素不敏感,误差不会长期积累,转过360°以后其积累误差为“0”。该系统结构简单、控制容易、维修方便,且控制为全数字化;是一种能将数字脉冲转化成一个步距角增量的电磁执行元件;能很方便地将电脉冲转换为角位移,具有较好的定位精度,无漂移的优点,能跟踪一定频率范围的脉冲列,可作为同步电动机使用。随着计算机技术的发展,除功率驱动电路之外,其他部分均可由软件实现,从而进一步简化结构,因此,至今国内外对这种系统仍在进行开发。
步进电动机的角位移或直线位移与脉冲数成正比,它的转速与脉冲频率成正比,能快速地起动、制动和反转;在一定频率范围内各种运动方式都能任意地改变且不会失步;当停止输入控制脉冲后,只要维持控制绕组电流不变,电动机就可以保持在某一固定位置上。所以步进电动机具有自整步的能力。
但是,由于步进电动机基本上是用开环系统,精度不高,不能应用于中高档数控机床;另外步进电动机耗能大,速度低(远不如交、直流电动机)。因此,目前步进电动机仅用于小容量、低速、精度要求不高的场合,如经济型数控,打印机、绘图机等计算机的外部设备。
2.步进电动机的结构
步进电动机是一种同步电动机,其结构同其他电动机一样,由定子和转子组成。定子为励磁场,其励磁场为脉冲式,即磁场以一定频率步进式旋转,转子则随磁场一步一步前进。
目前,我国使用的步进电动机多数为反应式步进电动机。图7-14是单段式(单定子)三相反应式步进电动机的结构原理图。定子铁心上有6个均匀分布的磁极,沿直径相对两个极上的绕组串联(或并联)连接,分别构成A、B、C三相励磁绕组。极与极之间的夹角为60°。每个定子磁极上均布5个齿,齿槽距相等,齿距角为9°。转子铁心上无绕组,只有均匀分布的40个齿,齿槽距相等,齿距角为3600°/40=9°。
三相(A、B、C)定子磁极上的齿是沿定子径向排列的,所以单段式也称径向式。三相定子磁极上的齿依次错开1/3齿距,即9°/3=3°,其沿周向展开后如图7-15所示。
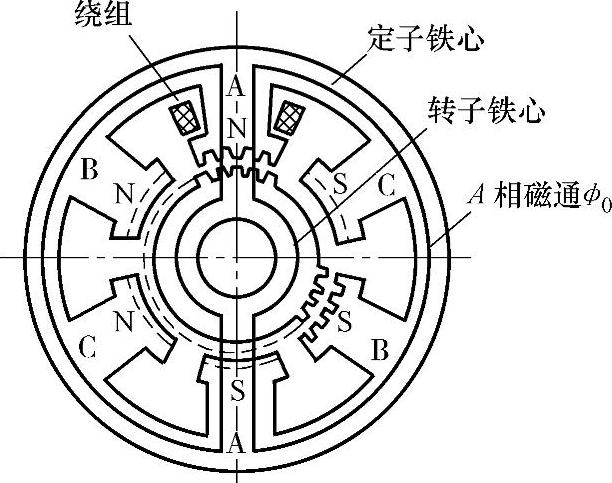
图7-14 单段式三相反应式步进电动机的结构原理
 (https://www.xing528.com)
(https://www.xing528.com)
图7-15 步进电动机的齿距
反应式步进电动机的另一种结构是多段式,图7-16是一种五段(轴向分相)定子反应式步进电动机的结构原理图。从图7-16中可以看出,步进电动机的定子和转子在轴向可分为5段(A、B、C、D、E段),每一段都形成独立的一相定子铁心、定子绕组和转子,如图7-17所示的是其中的一段。各段定子铁心上的齿就像内齿轮的齿形,由硅钢片叠成。转子的形状像一个外齿轮,由硅钢片制成,铁心和转子上的齿都没有开小齿。这种步进电动机各段定子上的齿在圆周方向均匀分布,彼此之间错开1/5齿距,其转子齿彼此不错位。当设置在定子铁心环形槽内的定子绕组通电时,形成一相环形绕组,构成如图7-17所示的磁力线回路。
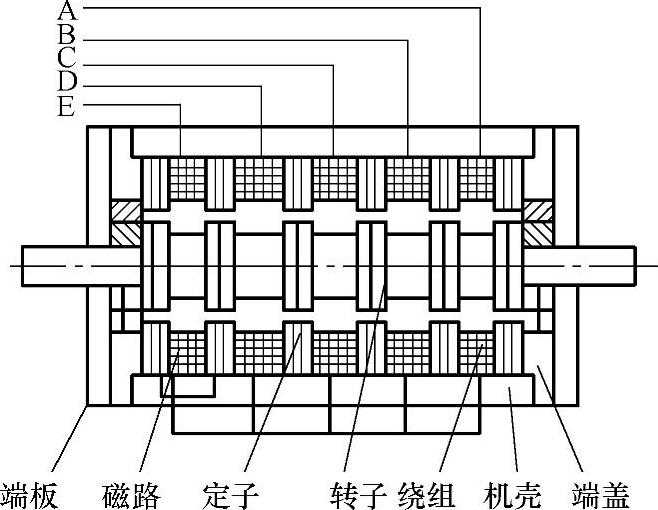
图7-16 五段定子反应式步进电动机的结构原理
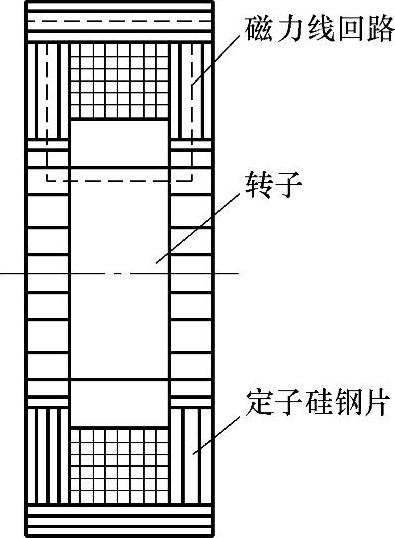
图7-17 一段定子、转子及磁回路
3.步进电动机的分类
步进电动机按转矩产生的原理可分为反应式、永磁式及混合式步进电动机;从控制绕组数量上可分为二相、三相、四相、五相、六相步进电动机;从电流的极性上可分为单极性和双极性步进电动机;从运动的形式上可分为旋转、直线、平面步进电动机。步进电动机的结构形式多,其分类方式也多。根据不同的分类方式,可将步进电动机分为多种类型,具体见表7-11。
表7-11 步进电动机的分类

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。