



伺服系统是一种反馈控制系统。它以指令脉冲为输入给定值,与输出被调量进行比较,利用比较后产生的偏差值对系统进行自动调节,以消除偏差,使被调量跟踪给定值。所以伺服系统的运动来源于偏差信号,必须具有负反馈回路,始终处于过渡过程状态。在运动过程中实现了力的放大。伺服系统必须有一个不断输入能量的能源,外加负载可视为系统的扰动输入。
伺服驱动系统能够控制移动机构实现稳定速度,并且精确定位,其难度非常大。因为电动机拖着一个重量很重的工作台,而且摩擦力随着温度、润滑状态、设备的新旧程度等因素而变化。但是随着科学技术的进步,人们不断从生产实践中总结经验,一步一步找到了好的控制办法,这就是三环结构。这三个环就是位置环、速度环、电流环。位置、速度、电流控制框图如图7-1所示。
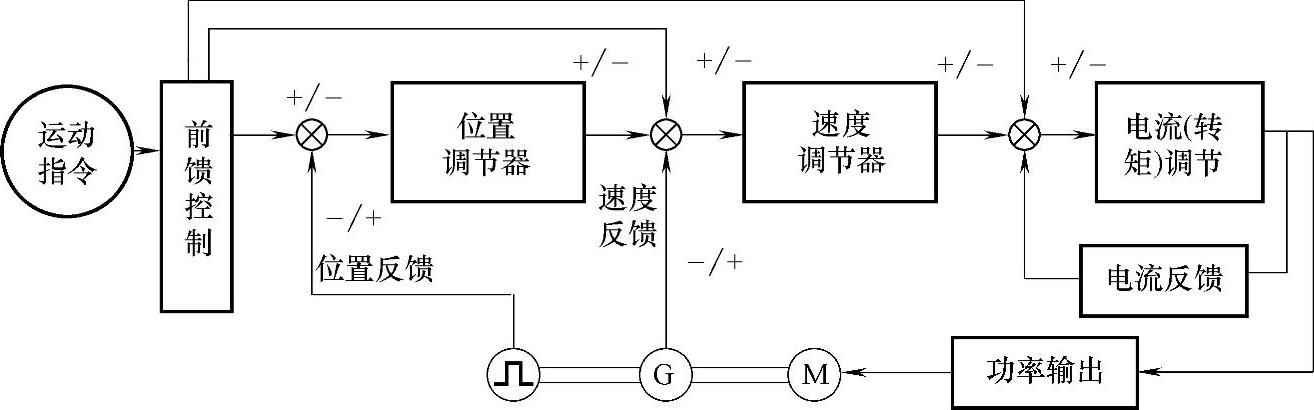
图7-1 位置、速度、电流控制框图
1.电流环
电流环也称内环。电流环有两个输入信号:一个是速度环输出的指令信号;另一个经电流互感器,并经处理后得到的电流信号,它代表电动机电枢回路的电流,它送入电流环也是负反馈。电流环的输出是一个电压模拟信号,用它来控制PWM电路,产生相应的占空比信号,去触发功率变换单元电路,使电动机获得一个与计算机指令相关的,并与电动机位置、速度、电流相关的运行状态。这个运行状态满足计算机指令的要求,是为伺服电动机提供转矩的电路。
一般情况下它与电动机的匹配调节已由制造者做好了,或者已指定了相应的匹配参数,其反馈信号也在伺服系统内连接完成,因此不需接线与调整。
2.速度环
速度环也称为中环,是一个非常重要的环。它的输入信号有两个:一个是位置环的输出,作为速度环的指令信号送给速度环;另一个是由电动机带动的测速发电机经反馈网络处理后的信息,作为负反馈送给速度环。速度环的两个输入信号也是反相的。一个是加,一个是减。速度环的输出就是电流环的指令输入信号,是控制电动机转速亦即坐标轴运行速度的电路。速度调节器是比例积分(PI)调节器,其P、I调整值完全取决于所驱动坐标轴的负载大小和机械传动系统(导轨、传动机构)的传动刚度与传动间隙等机械特性,一旦这些特性发生明显变化时,首先需要对机械传动系统进行修复工作,然后重新调整速度环PI调节器。
速度环的最佳调节是在位置环开环的条件下才能完成的。这对于水平运动的坐标轴和转动坐标轴较容易进行;而对于垂向运动坐标轴则位置环开环时会自动下落而发生危险,这时可以采取先摘下电动机空载调整,然后再装好电动机与位置环一起调整,或者直接带位置环一起调整,这需要有一定的经验和细心。
3.位置环
位置环也称为外环,其输入信号是计算机给出的指令和位置检测器反馈的位置信号。这个反馈是负反馈,也就是说与指令信号相位相反。指令信号是向位置环送去加数,而反馈信号是送去减数。位置环的输出就是速度环的输入,它是控制各坐标轴按指令位置精确定位的控制环节。
1)位置环将最终影响坐标轴的位置精度及工作精度。这其中有如下两方面的工作:
①一是位置测量元件的精度与CNC系统脉冲当量的匹配问题。测量元件单位移动距离发出的脉冲数目经过外部倍频电路与CNC指令脉冲经内部倍频系数的倍频后要与数控系统规定的分辨率相符。例如位置测量元件10脉冲/mm,数控系统分辨率即脉冲当量为0.001mm,则测量元件送出的脉冲必须经过100倍频方可匹配。
②二是位置环增益系数Kv的正确设定与调节。通常Kv是作为机床数据设置的,数控系统中对各个坐标轴分别指定了Kv值的设置地址和数值单位。在速度环最佳化调节后Kv的设定则成为反映机床性能好坏、影响最终精度的重要因素。Kv值是机床运动坐标自身性能优劣的直接表现,而并非可以任意放大。关于Kv的设置要注意两个问题,首先要满足如下公式:
Kv=v/Δ(https://www.xing528.com)
式中v——坐标运行速度(min);
Δ——跟踪误差(mm)。
注意,不同的数控系统采用的单位可能不同,设置时要注意数控系统规定的单位。例如:坐标运行速度v的单位是m/min,Kv值单位为m/(m·min),若v的单位为mm/s,Kv的单位应为mm/(mm·s)。
其次要满足各联动坐标轴的Kv值必须相同,以保证合成运动时的精度。通常是以Kv值最低的坐标轴为准。
2)位置反馈有三种情况:
①一种是没有位置测量元件,位置开环控制即无位置反馈,步进电动机驱动一般即为开环;
②另一种是半闭环控制,即位置测量元件不在坐标轴最终运动部件上,也就是说还有部分传动环节在位置闭环控制之外,这种情况要求环外传动部分应有相当的传动刚度和传动精度,加入反向间隙补偿和螺距误差补偿之后,可以得到很高的位置控制精度;
③第三种是全闭环控制,即位置测量元件安装在坐标轴的最终运动部件上,理论上这种控制的位置精度情况最好,但是它对整个机械传动系统的要求更高(而不是低),如若不然,则会严重影响两坐标的动态精度,而使得机床只能在降低速度环和位置精度的情况下工作。
影响全闭环控制精度的另一个重要问题是测量元件的精确安装问题,千万不可轻视。
4.前馈控制
前馈控制与反馈相反,它是将指令值取出部分预加到后面的调节电路,其主要作用是减小跟踪误差以提高动态响应特性从而提高位置控制精度。因为多数机床没有设此功能,故本文不详述,只是要注意,前馈的加入必须是在上述三个控制环均已最佳调试完毕后方可进行。
这三个环都是调节器,其中有时采用比例调节器,有时采用比例积分调节器,有时还要用比例积分微分调节器。比例调节器称之为P调节器;比例积分调节器称之为PI调节器;比例积分微分调节器称之为PID调节器。之所以采用这种调节方式,主要是能充分利用设备的潜能,使整个机床能快速准确地响应计算机的指令要求。
在这个三环系统中,应该知道两个问题。第一个问题是位置调节器的输出是速度调节器的输入;速度调节器的输出是电流调节器的输入;电流调节器的输出直接控制功率变换单元,也就是去控制PWM。第二个问题就是这三个环的反馈信号都是负反馈,这里没有正反馈问题,所以三个环都是反相放大器。
以上谈到的三环结构仅仅是一个原理的叙述。这三个环及其反馈信号在具体的机床中会有很大的变化。不管有什么变化,但基本的控制思想不变。关于位置反馈网络、速度反馈网络、电流反馈网络到底是什么样子,在这里不做详细的叙述。可以这么说,有时是非常简单的一个电位器,或者是一个滤波电路,但有时确有着复杂的逻辑关系。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。