



交流伺服电动机有永磁式同步电动机和笼型异步电动机两种结构形式,而且绝大多数采用永磁式同步电动机的结构形式。而交流主轴电动机的情况则不同。交流主轴电动机均采用异步电动机的结构形式。这是因为,一方面受永磁体的限制,当电动机容量做得很大时,电动机成本会很高,对数控机床来说无法采用;另一方面,数控机床的主轴传动系统不必像进给伺服系统那样要求如此高的性能,采用成本低的异步电动机进行矢量闭环控制,完全可满足数控机床主轴的要求。但对交流主轴电动机的性能要求又与普通异步电动机不同。交流主轴电动机的输出特性曲线(输出功率与转速关系)在基本速度以下时为恒转矩区域;在基本速度以上时为恒功率区域。
交流伺服系统一般均采用PWM调制信号控制功率晶体管进行驱动放大的主回路,并按其指令信号与控制形式,分为模拟式伺服与数字式伺服两类。初期的交流伺服系统一般是模拟式伺服系统,而目前使用的交流伺服通常都是采用数字量控制的全数字式交流伺服系统。
交流伺服电动机提高其性能的关键在于解决对交流电动机的控制与驱动。现代交流伺服系统一般都采用磁场矢量控制方式,它使交流伺服驱动系统的性能完全达到了直流伺服驱动系统的性能。典型的交流模拟伺服系统原理如图6-8所示。
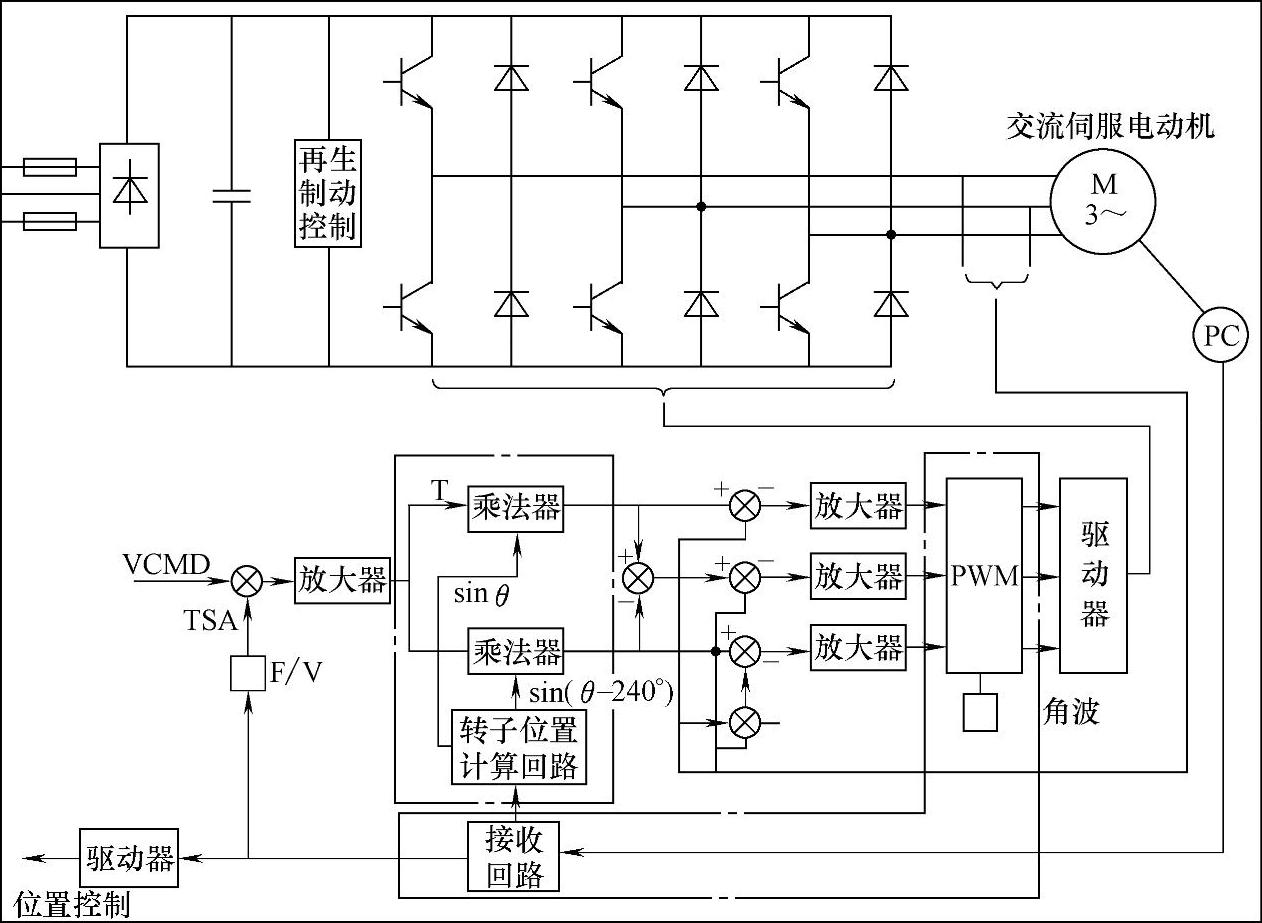
图6-8 交流模拟伺服系统原理
系统的工作过程简述如下:速度给定指令VCMD来自数控系统;来自检测元件(通常为脉冲编码器)的信号经F/V变换后作为系统的速度反馈信号TSA;它们经比较、放大后,输出速度误差信号;速度误差信号再经调节器放大,作为转矩指令输出;转矩指令信号通过乘法器,分别与转子位置计算回路中输出的sinθ和sin(θ-240°)算子相乘,其乘积作为电流指令信号输出;电流指令又与电流反馈信号相比较后,产生电流误差信号,电流误差信号经放大,输出到PWM控制回路,进行脉宽调制控制;脉宽调制信号通过功率晶体管与电源回路的逆变,形成三相交流电,控制交流伺服电动机的电枢。(https://www.xing528.com)
图6-9所示为数字式交流主轴伺服系统框图。
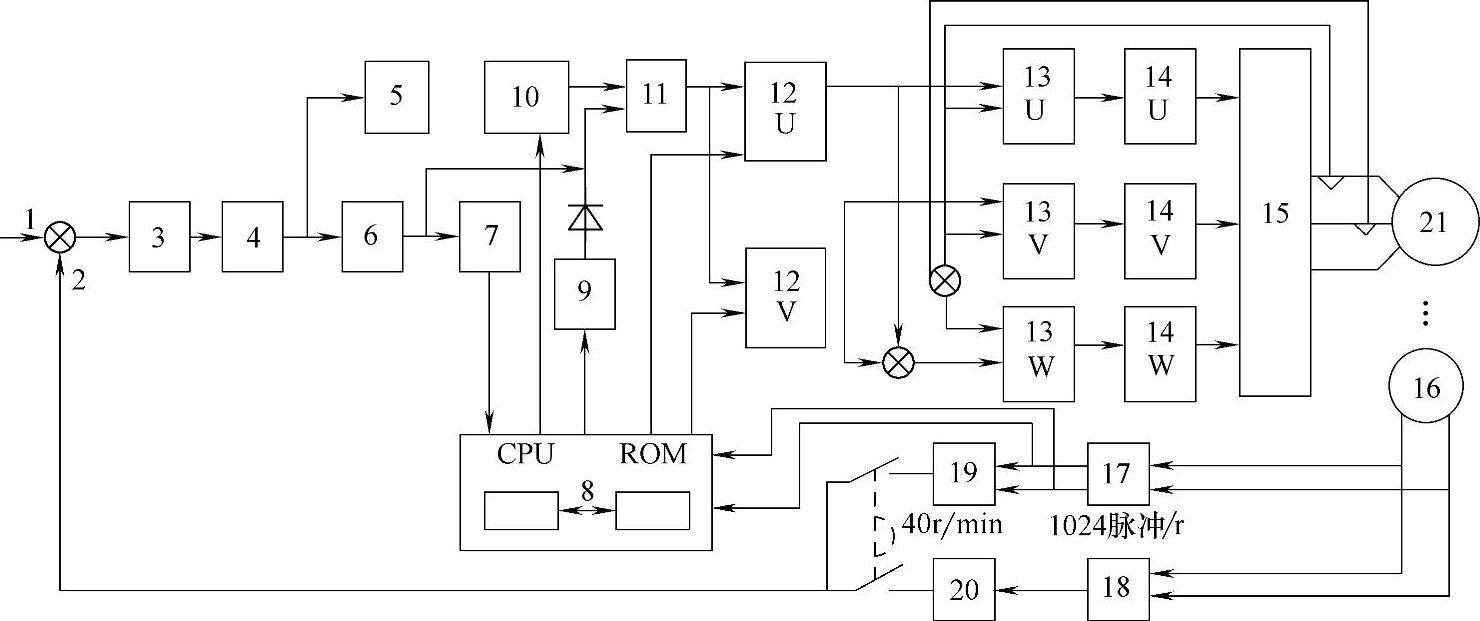
图6-9 数字式交流主轴伺服系统框图
1—速度指令 2—速度反馈 3—比例积分回路 4—绝对值回路 5—负载表 6—函数发生器 7、19—V/F变换器 8—微处理器 9—DA强励磁 10—DA振幅器 11—乘法器 12—电流指令回路 13—电流控制回路 14—PWM控制回路 15—PWM变换器 16—脉冲发生器 17—四倍回路 18—微分回路 20—同步整流电路 21—交流电动机
由数控系统来的速度指令(例如10V时相当于6000r/min或4500r/min)在比较器中与检测器的信号相遇之后,经比例积分回路3将速度误差信号放大作为转矩指令电压输出,再经绝对值回路4使转矩指令电压永远为正;然后经函数发生器6(它的作用是当电动机低速时提高转矩指令电压),送到V/F变换器7,变成误差脉冲(例如10V相当于200kHz),该误差脉冲送到微处理器8并与四倍回路17送来的速度反馈脉冲进行运算;在此同时,预先写在微处理器部件中的ROM中的信息读出,分别送出振幅和相位信号,送到DA强励磁9和DA振幅器10。DA强励磁回路用于控制增加定子电流的振幅,而DA振幅器10用于产生与转矩指令相对应的电动机定子电流的振幅。它们的输出值经乘法器11之后形成定子电流的振幅,送给U相和V相的电流指令回路12。另一方面,从微处理器输出的U、V两相的相位[即sinθ和sin(θ-120°)]也被送到U相和V相的电流指令回路12。它实际上也是一个乘法器,通过它形成了U相和V相的电流指令;这个指令与电动机电流反馈信号相遇之后的误差,经放大后送至PWM控制回路14,变成频率为3kHz的脉宽信号。上述脉冲信号经PWM变换器15控制电动机的三相交流电流。脉冲发生器16是一个速度检测器,用来产生每转256个脉冲的正、余弦波形,然后经四倍回路17变成1024脉冲/r。它一方面送微处理器,另一方面经F/V变换器19作为速度反馈送到比较器2,并与速度指令进行比较。但在低速时,由于F/V变换器的线性度较差,所以此时的速度反馈信号由微分电路18和同步整流电路20产生。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。