



1)参数号:1020。该参数的作用是设置各轴的程序名。数据类型为字节型。各控制轴的程序名称按表3-2设定。
表3-2 各控制轴的程序名称

在数控铣床中,参数1020标准设定值应为X:88;Y:89;Z:90。
该参数主要用于确定运动轴和程序中编程用坐标轴的对应关系。在此设定什么轴名称,显示和编程则用什么轴名称。若把第一轴设定为85,则将在位置显示屏幕上显示第一轴为“U”。
2)参数号:1022。该参数的作用是设置各轴在基本坐标系中的性质。数据类型为字节轴型。设定各轴是基本坐标系的3个基本轴X、Y、Z,或者是基本轴的平行轴。对于3个基本轴X、Y、Z只能设定其中的一个轴,而对其平行轴可以设定两个或两个以上。具体设定值见表3-3。
表3-3 坐标系中各轴的设定值

3)参数号:1023。该参数用于设定各轴的伺服轴号。数据类型为字节型。数据范围:1~2。设定各控制轴所对应的伺服轴,通常将控制轴号与伺服轴号设定成相同的值。例如本参数应设为X:1;Y:2;Z:3。
4)参数号:1240。该参数用于设定各轴第一参考机械坐标系的坐标值。数据类型为双字型。数据单位:0.001mm。数据范围:0~±99999999。这个参数主要用于设定数控机床参考点离机床原点的坐标值,回参考点后显示的值即在此设定。分别设定X轴数据、Y轴数据与Z轴数据。
5)参数号:1320、1321。该组参数主要用于设置机床运动行程范围。参数1320设置正方向运动行程;参数1321设置负方向运动行程。数据类型为双字型。数据单位:0.001mm。数据范围:-99999999~+99999999。
设定每个轴在机床坐标系中存储行程极限的正方向及负方向的坐标值,在参考点设定的区域外为禁止区域。若设定参数1320的设定值小于参数1321的设定值,则认为行程为无穷大。这个参数就是平时讲的软限位。(https://www.xing528.com)
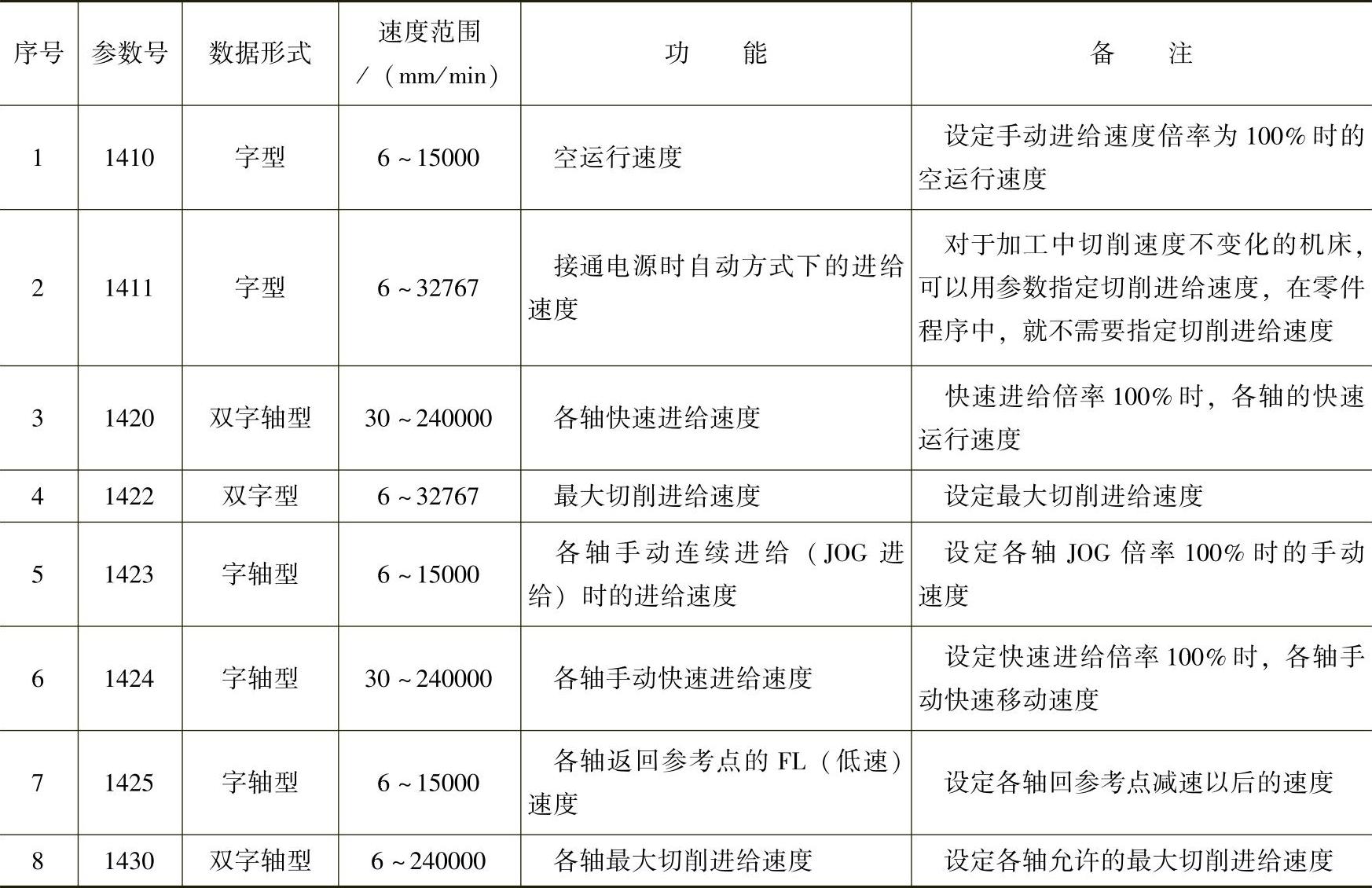
6)有关进给速度设定。调试中如果使进给电动机运动,相关运动的速度必不可少。有关速度参数的设定见表3-4。参数具体值要根据机床设计指标和用户要求而定。
表3-4 速度参数的设定
7)参数号:50020参数5002#0:LD1主要设置刀具位置偏移量的偏移号。参数5002#6:LWM主要设置刀具位置偏移量何时偏移。数据类型为位型。
LD 1:刀具位置偏移量的偏移号:
0——在T代码后指定2位数;
1——在T代码后指定1位数。
LWM:是否进行刀具位置偏移:
0——在T代码的程序段进行;
1——轴移动同时进行。
上面的参数LD1设定0/1主要用于指定编程时TXXX中偏移号的位数和T代码编程格式,以便确定T刀号的数值。LWM设定0/1主要确定刀偏何时起作用。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。